

2.10 Этапы структурного проектирования автомата Мили. Привести пример.
Автомат Мили – это конечный автомат, выходная последовательность которого зависит от состояния автомата и входных сигналов. Это означает, что в графе состояний каждому ребру соответствует некоторое значение (выходной символ) Этапы:
•Формирование требований к поведению, где происходит определение задач, которые должен решить автомат
•Определение входов и выходов, где происходит распределение входных сигналов, которые воздействуют на автомат, и выходных сигналов, которые автомат должен генерировать.
•Определение состояний, где определяется состояния, в которых может находиться автомат в процессе работы
•Проектирование переходов, где определяются условия переходов между состояниями в зависимости от входных переменных и текущего состояния.
•Проектирование выходный функции, где для каждого состояния определяются выходные значения
•Анализ, где происходит проверка соответствия требованиям
•Реализация где происходит программирование и конфигурация автомата на основе проектирования.
2.11 Этапы структурного проектирования автомата Мура. Привести пример.
Выходной сигнал в атомате Мура зависит только от состояния в рассматриваемый момент времени. Конечный автомат, выходное значение сигнала в котором зависит лишь от текущего состояния данного автомата, и не зависит напрямую Этапы:
•Определение состояний автомата, где определяются состояния на основе функциональности
•Определение входных-выходных сигналов, где определяются входные сигналы воздействующие на автомат, и выходные сигналы, которые он должен генерировать.
•Построение таблицы переходов состояний, где определяются переходы в зависимости от текущего состояния автомата.
•Построение таблицы выходных сигналов, где определяются выходые сигналы на основе состояния автомата и переходов.
•Проведение анализа, где происходит проверка на работоспособность
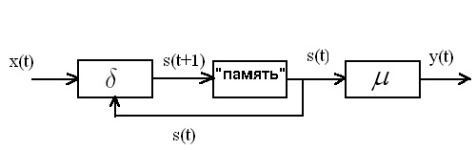
•Реализация, где происходит программирование и конфигурация автомата на основе проектирования. Формула:
a(t+1)=δ(a(t),z(t)) w(t)=λ(a(t))
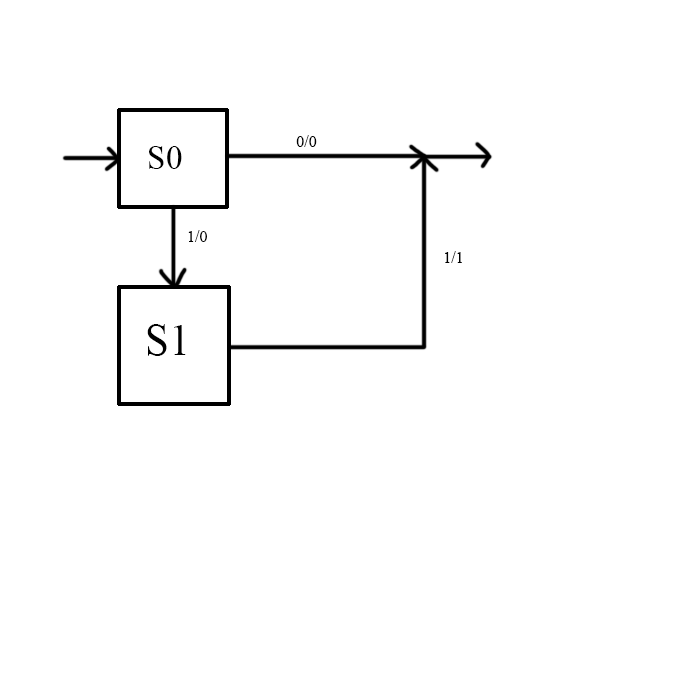
Пример:
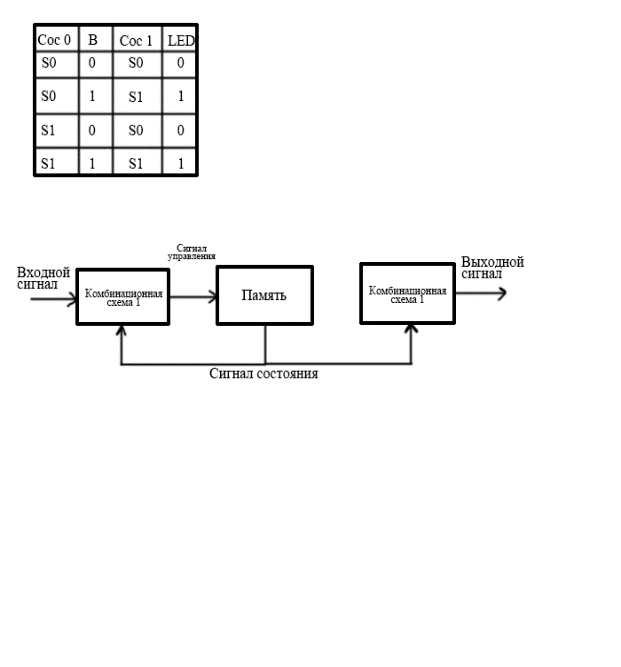
Два состояния: S0-выключено. S1-включено.
Входы выходы: B - Сигнал кнопки. LED – Сигнал светодиода
Проектирование: Если B=1, то S0 -> S1. Если B=0, то S1 -> S0
Выходные сигналы: Если S1, то LED = 1. Если S0, то LED = 0.
2.12 Сравнительный анализ управляющих автоматов по модели Мили и по модели Мура (общность и отличия).
Модели Мили и Мура - это два основных подхода к проектированию управляющих автоматов. Общность:
•Оба автомата должны иметь конечное число состояний, которое они могут принимать
•Оба автомата определяются набором условий, по которым автомат переходит из одного состояния в другое.
•Оба автомата учитывают входные сигналы для принятия решений о переходах
Отличия:
•Выходные сигналы в автомате Мили определяются не только текущим состоянием, но и выходными сигналами. В автомате Мура выходные сигналы определяются только текущим состоянием.
•Модель автомата Мили обычно более простая, так как выходные сигналы зависят от переходов между состояниями, что помогает уменьшить модель. Модель автомата Мура может привести к большому количеству состояний, так как может потребовать большого количества комбинаций состояний.
•Автомат Мили более гибки при определении выходных сигналов, в зависимости от входных. А автомат Мура более гибкий для определения уникальных выходных сигналов для каждого состояния.