

Свойства свободного гироскопа.
Гироскоп обладает следующими свойствами:
- сохраняет неизменной положение оси вращения в пространстве;
- устойчив к ударным воздействиям;
- обладает необычной реакцией на действие внешней силы. Если сила стремится повернуть гироскоп относительно одной оси, то он поворачивается вокруг другой, ей перпендикулярной;
- гироскоп безинерционен.
Применение гироскопов и гироскопические эффекты.
Применения гироскопов:
- в качестве компаса. Свободный гироскоп сохраняет свою ориентацию в пространстве (например, направление на полярную звезду) независимо от движения Земли и всевозможных толчков. Заметим, что пользоваться этим компасом можно только в течение ограниченного времени, пока силы трения в подшипниках не "уведут" ось гироскопа.
- в качестве автоматического устройства управления курсом торпед. Ось гироскопа сохраняет свое направление на цель, в то время как ее ориентация относительно корабля может меняться. При этом включаются двигатели, производящие переориентировку торпеды.
- в качестве автопилота в летательных аппаратах. В данном случае используется два гироскопа. Один задает горизонтальную плоскость, а второй - направление.
В- качестве успокоителя качки на кораблях.
Несвободный гироскоп используется в качестве гироскопического компаса (компас Фуко).
К отрицательным последствиям проявления гироскопических эффектов можно отнести силы, разрушающие механические конструкции. Эти силы возникают в подшипниках при попытке изменения положения оси вращения различных валов.
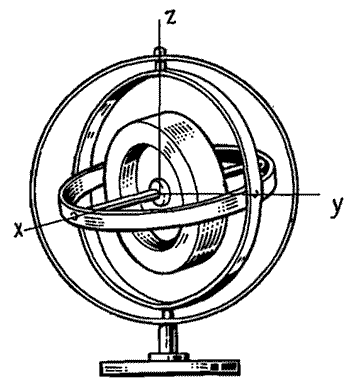
Рис.3 Гироскоп на карданном подвесе.
Возможность изменения положения оси вращения гироскопа в пространстве можно осуществить с помощью карданных колец (рис. 3). Подвешенный таким образом гироскоп получает возможность поворачиваться вокруг следующих трех взаимно перпендикулярных и пересекающихся в одной точке О осей: оси вращения X – X самого гироскопа, называемой главной осью или осью собственного вращения, оси вращения Y – Y внутреннего кольца, оси вращения Z - Z наружного кольца подвеса.
Гироскоп, у которого возможны вращения вокруг трех указанных осей, называется гироскопом с тремя степенями свободы. Точка пересечения этих осей называется точкой подвеса гироскопа.
Для демонстрации различных свойств гироскопа и проведения экспериментов удобно пользоваться несколько иной конструкцией (рис.4). Тяжелый диск С соединен с электродвигателем и жестко закреплен на оси А, которая может совершать движение как в вертикальной так и в горизонтальной плоскостях благодаря карданному подвесу. Для уравновешивания диска С и электродвигателя на другом конце оси А помещен груз Р, который может перемещаться вдоль оси А. Для определения скорости прецессии гироскопа предусмотрен лимб Д, по которому ведется отсчет углов.
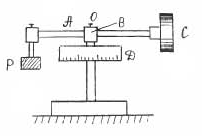
Рис. 4
Экспериментальная установка.
На основании 1, (см. рис. 5) оснащенном ножками с регулируемой высотой закреплена колонна 2. С помощью ножек можно произвести выравнивание прибора по горизонтали. На колонне имеется кронштейн 3 с фотоэлектрическим
датчиком 4 и внешней втулкой вращательного соединителя 5. Соединитель 5 позволяет гироскопу вращаться вокруг вертикальной оси и обеспечивает электрическое питание фотоэлектрического датчика 6 и электродвигателя 7. Электродвигатель смонтирован на кронштейне 8 таким образом, что имеется возможность его ограниченного поворота в вертикальной плоскости. На валу двигателя закреплен диск 9, защищенный кожухом 10. На рычаге 11, с нанесенной на нем метрической шкалой, крепится противовес 12. Перемещением противовеса по рычагу можно либо создать внешний вращательный момент М, либо уравновесить гироскоп. Угол поворота вокруг вертикальной оси можно определить по шкале 13 с помощью указателя 14, или с помощью блока управления и измерений 15. Шкала 13 имеет отверстия через каждые 5°, которые позволяют с помощью фотодатчика 4 определить угол поворота гироскопа. Этот угол высвечивается на индикаторе 16.
Диск 9 имеет на окружности отверстия, которые подсчитываются с помощью фотоэлектрического датчика 6 и по индикатору 17 можно определить угловую скорость вращения диска. Ее можно регулировать с помощью ручки 18. Время прецессии фиксируется на индикаторе 19.
Нажатие клавиши «Сеть» 20 вызывает включение питающего напряжения.
При нажатии клавиши «Сброс» 21 осуществляется перевод блока измерений в исходное нулевое состояние. Нажатием клавиш «Стоп» можно остановить отсчет угла и времени прецессии.
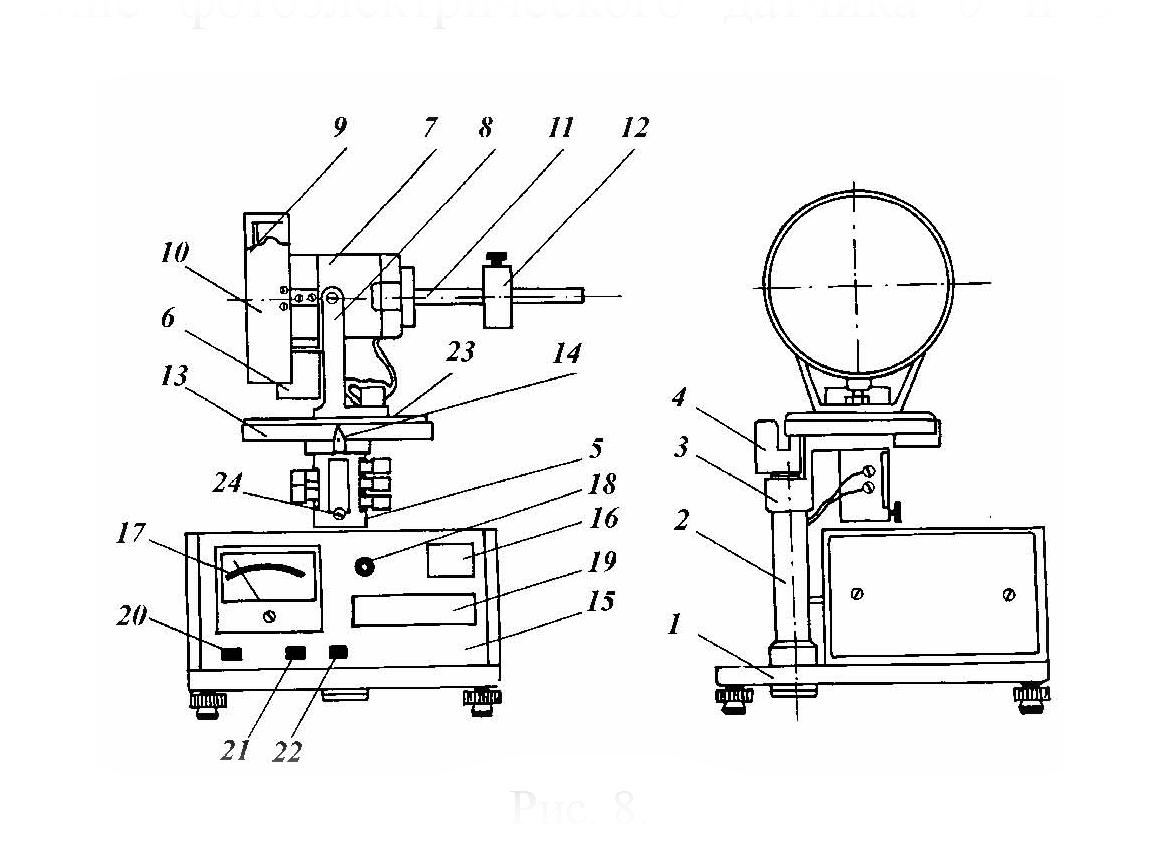
Рис. 5
Порядок выполнения работы:
ВНИМАНИЕ! Раскрученный гироскоп обладает большим запасом
кинетической энергии. ПРИ ПРОВЕДЕНИИ УПРАЖНЕНИЙ СТРОГО СЛЕДУЙТЕ ПРИВЕДЕННЫМ НИЖЕ УКАЗАНИЯМ.
1. Перед началом работы убедитесь, что рычаг 11 с гироскопом может свободно вращаться вокруг горизонтальной и вертикальной осей.
2. С помощью ножек с регулируемой высотой и уровня 23 установите прибор горизонтально.
3. Перемещением противовеса 12 добейтесь, чтобы рычаг 11 занял горизонтальное положение.
4. Ручку «Регулятор скорости» на панели прибора переведите в крайнее левое положение.
5. Включите прибор клавишей «Сеть». При этом загораются табло индикаторов и лампочки фотодатчиков.
6. Плавно (!) поворачивая «Регулятор скорости», включите электродвигатель и установите скорость вращения гироскопа около 5000 об/мин. В течение всего эксперимента скорость вращения гироскопа изменять не следует.
7. Легким постукиванием рукой по кончику рычага 11 убедитесь в том, что ось гироскопа не меняет своего направления в пространстве.
8. Закрепите вертикальную ось гироскопа винтом 24. Слегка покачивая ось гироскопа, убедитесь, что она легко меняет свое направление в вертикальной плоскости.
9. По метрической шкале рычага 11 определите положение l0 противовеса 12 при уравновешенном гироскопе.
10.Освободите вертикальную ось гироскопа винтом 24. При этом не должно наблюдаться прецессии.
11.Смещением противовеса по рычагу на расстояние Δl=l−l0 создайте вращающий момент M = P·Δl , где Р − вес противовеса (масса противовеса указана на нем).
12.С помощью секундомера и шкалы 16 определите угловую скорость прецессии Ω = φ/t , где φ - угол поворота за время t . По индикатору 17 определите угловую скорость вращения диска гироскопа ω. Подсчитайте значение величины ωΩ. Следите за тем, чтобы ось гироскопа была горизонтальна.
13. Измерения времени и угла прецессии повторить четыре раз при разных положениях груза и одном и том же значении оборотов гироскопа. Результаты измерений занести в табл
14.Из формулы (6) следует, что M = IωΩ, т.е. график зависимости вращающего момента М от произведения ωΩ является прямой с тангенсом угла наклона равным моменту инерции гироскопа. Постройте этот график и определите момент инерции гироскопа.
15. Оценить погрешность определения момента импульса гироскопа и момент инерции ротора двигателя и маховика по данным таблицы 1
Таблица 1.
-
измерения
Положение про-тивовеса 12 в состоянии равновесия системы l0, м
Число оборотов гироскопа n
Положения перемещаемого противовеса li,м
Значения угла прецессии
φ, рад
Время прецес-сии t, с
Угловая скорость прецессии , рад/c
li-l0/Ω мс/рад
1
2
3
…