

Глава 3. Система автоматического управления полетом самолета сау- 451-03. Апус.
3.1. Назначение и основные технические данные сау-451-03
Система автоматического управления САУ-451-03 предназначена для автоматического управления легким фронтовым истребителем, улучшения характеристик его устойчивости и управляемости при ручном и полуавтоматическом (директорном) управлении и повышения безопасности полета.
Она представляет собой трехканальную нерезервированную САУ, выполняющую следующие функции:
-демпфирование короткопериодических колебаний самолета по крену, тангажу и рысканию;
- стабилизацию углового положения самолета по крену и тангажу, а также стабилизацию курса в зоне углов крена менее ±7 и тангажа менее ±40;
- приведение самолета к горизонтальному полету из любого пространственного положения;
- стабилизацию заданной барометрической высоты полета;
- автоматический увод самолета из зоны опасной высоты;
- автоматическое и директорное управление полетом при заходе на посадку до высоты 50-60 м.;
- триммирование (балансировка) при ручном управлении по крену и тангажу;
- индикацию положения самолета на приборах КПП и ПНП (прибор навигационный плановый);
- проведение предполетного тест-контроля с выдачей сигналов для световой сигнализации при отказе САУ.
Основные технические данные САУ-451-03:
1) Напряжения питания: постоянное 27В и переменные трехфазные 200В 400 Гц и 36 В 400 Гц;
2) Погрешность работы САУ:
- по тангажу - не более 0,5 град.;
- по крену и курсу - не более 1 град.;
- по высоте: до Н = 0,5 км ±15 м.;
на Н = 0,5-12 км ± 50 м.; на Н более 12 км ± 70 м.;
- точность стабилизации на этапах захода на посадку (на Д=1000 м от ВПП) ±(5ч-б) м.
3) Время готовности к работе (от включения питания) - не более 2 мин.;
4) Время непрерывной работы - не более 3 часов (с последующим перерывом не менее 1 часа);
5) Максимальный ход штоков автономных рулевых машин (АРМ):
15_1, 16
В состав САУ-451-03 не входят, но совместно с ней работают следующие системы и датчики:
- инерциальная курсовертикаль (ИКВ) из состава информационного комплекса вертикали и курса ИК-ВК-80;
- система воздушных сигналов СВС-И-72-3;
- радиотехническая система ближней навигации и посадки (РСБН);
- радиовысотомер (РВ);
- автоматический радиокомпас (АРК);
- датчик аэродинамических углов (ДАУ);
- приемник воздушных давлений (ПВД).
Датчики информации выдают в вычислитель управления сигналы, пропорциональные угловым скоростям крена (ωx), рыскания (ωy) и тангажа (ωz) (ДУСУ), нормальной nу и поперечной nz перегрузкам самолета (ДЛУ), статическому давлению Pст и скоростному напору q (ИКД), отклонению от заданной барометрической высоты полета самолета ΔН (КВ), отклонению ручки управления самолета по крену Хр (ДПР), а также разовые команды выпущенного и убранного положения управляемых носков крыла (МУ-615А). Наличие в составе САУ-451-03 дублирующих датчиков ДУСУ и ДЛУ обусловлено независимым использованием их в различных режимах работы САУ. Принцип действия указанных датчиков аналогичен принципу действия соответствующих датчиков, входящих в состав САУ-23А.
Вычислитель управления (ВУ) является основным блоком САУ и предназначен для формирования сигналов управления и команд для исполнительных устройств в различных режимах ручного и автоматического управления самолетом. Вся схема вычислителя управления разбита на 25 функционально законченных субблоков и узлов, каждый из которых выполнен в виде отдельной съемной печатной платы, имеет свое название и вполне определенные функции. Например, вычислитель корректирующих функций ВКФ-416 - это субблок ВУ, который формирует корректирующие функции для изменения передаточных функций САУ по углу атаки а, скоростному напору , статическому давлению Рст и числу М. А автомат тангажа АТ-14 - это субблок ВУ, формирующий управляющие сигналы для продольного канала в определенных режимах работы САУ, и т.д. Все субблоки и узлы ВУ установлены в общем корпусе и каждый из них имеет механический код для предохранения от неправильной установки.
Блоки следящих систем (БСС) предназначены для преобразования сигналов крена (γ) и тангажа (ν), поступающих из ИКВ в САУ на устройства индикации.
Органы управления и средства сигнализации режимов работы САУ расположены на пульте управления ПУ-189 и на ручке управления самолетом. Лицевая панель пульта ПУ-189 показана на рис.3.2.
Вся информация, необходимая для ручного, директорного и автоматического режимов работы САУ, индицируется на командно-пилотажном приборе (КПП) я плановом навигационном приборе ПНП-72-12. Командно-пилотажный прибор по назначению, выполняемым функциям и принципу работы аналогичен командно-пилотажному прибору КПП-К серии 2, который использовался в САУ-23А-2 серии.

Рис.3.2: Лицевая панель пульта ПУ-189
Лицевая панель КПП представлена на рис.3.3
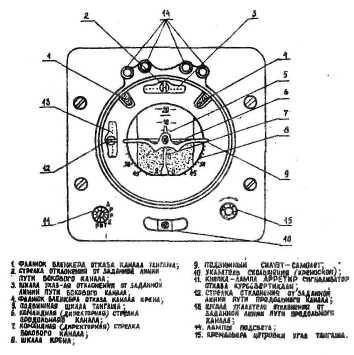
Рис.3.3. Лицевая часть КПП
Прибор ПНП-72-12 по своему назначению и выполняемым функциям близок к навигационно-пилотажному прибору НПП-ДК серии 3, рассмотренному при изучении САУ-23А, но имеет и некоторые существенные отличия. Данный прибор будет рассмотрен ниже.
Сигналы контроля состояния элементов САУ-451-03 и режимов ее работы выдаются на УСТ системы ЭКРАН, в устройство регистрации полетных данных ТЕСТЕР-УЗ-Л, на световое табло аварийных режимов ТС-5М и на центральный сигнальный огонь (ЦСО). В полуавтоматическом режиме работы САУ управляющие сигналы выдаются также в систему единой индикации (СЕИ) для отображения на индикаторе прямого видения (ИПВ) положения самолета относительно задаваемой траектории в вертикальной и горизонтальной плоскостях.
Исполнительная часть САУ-451-03 включает автономные рулевые машины (АРМ) и механизмы триммерного эффекта (МТ). Автономные рулевые машины имеют малый диапазон отклонения штока (а следовательно и рулей), но зато большую скорость их перемещения. Поэтому они используются для демпфирования угловых колебаний самолета по тангажу, крену и рысканию, а также для обеспечения требуемой продольной устойчивости (АПУС - автомат продольной устойчивости). Механизмы триммерного эффекта (МТ) имеют большой диапазон отклонения штока (рулей) и относительно малую скорость их перемещения, и используются в режимах ручного и автоматического управления для управления стабилшатором и элеронами совместно с АРМ.
Рулевые машины APM-I50M и АРМ-150К отличаются друг от друга только величиной хода исполнительного штока, а электромеханизмы МТ16Е8 и МТ16Е8А - величиной хода штока и максимальной скоростью перемещения штоков.
Рассмотрим несколько подробнее АРМ-150М(К), МТ16Е8(А) в прибор навигационный плановый ПНП-72-12.
Машина рулевая элекщоиасосиая электрогидравлнческая АРМ-150М(К) питается напряжением переменного трехфазного тока 200 В 400 Гц. Масса АРМ, заполненной рабочей жидкостью, не более 5,8 кг. Структурная схема АРМ-150 представлена на рис.3.4:

Рис. 3.4: Структурная схема АРМ-150М(К)
На схеме:
KB - клапан включения (подключает АРМ в качестве исполнительного механизма САУ);
ЭД - электрический двигатель (приводит в действие аксиально-плунжерный насос);
АПН - аксиально-плунжерный насос (создает давление рабочей жидкости); ГК - гидрокомпенсатор (поддерживает давление на входе в АПН и компенсирует температурные изменения объема рабочей жидкости);
ЭГУ - электрогидроусилитель (управляет гидродвигателем АРМ);
ГДв - гидродвигатель (перемещает выходной шток АРМ); ФЭ - фильтроэлемент (для фильтрации рабочей жидкости в гидросистеме); КК - клапан кольцевания (разделяет рабочие области гидродвигателя при достаточном давлении и создает единую полость при отсутствии рабочего давления);
ГМС - гидромеханический стопор (фиксирует шток в среднем положении при отсутствии рабочего давления жидкости);
ДОС - датчик обратной связи (выдает электрические сигналы, пропорциональные величине смещения штока АРМ).
Автономные рулевые машины АРМ-150 имеют встроенный контроль работоспособности по уровню рабочей жидкости (для этого в замкнутой полости АРМ установлено устройство сигнализации - геркон) и по наличию электропитания.
Электромеханизм (механизм триммерного эффекта) МТ16Е8(А): одноканальный, поступательного действия. Питается напряжением переменного трехфазного тока 36 В, 400 Гц. Состоит из следующих основных узлов (см. структурную схему на рис.3.5):

Рис. 3.5: Структурная схема электромеханизма МТ16Е8(А)
ДГ - двигатель-генератор (реверсивный, переменного тока, ДИД + ТГ);
Р - редуктор (передает крутящий момент от вала ДГ на винт шариковой
винтовой пары);
ШВП - шариковая винтовая пара (преобразует вращательное движение винта в поступательное движение гайки с выходным штоком);
ЭММТ - электромагнитная муфта торможения (стопорит гайку-шток при отключении электромеханизма);
РОС - резистор обратной связи (обеспечивает позиционную ОС); Блок MB - блок микровыключателей (выдает эл. сигналы во внешнюю эл. цепь в крайних и промежуточных положениях гайки-штока).
При подаче питания на двигатель-генераторе вращение через редуктор передается на винт шариковой винтовой пары и одновременно на вал резистора. ШВП преобразует вращательное движение винта в поступательное движение гайки-штока, обеспечивая прямой и обратный ход.
Прибор навигационный плановый ПНП-72-12 предназначен для контроля положения самолета относительно заданной линии пути в горизонтальной плоскости, указания курса самолета, а также радиоориинтиров при полете на маршруте и заходе на посадку.
Прибор запитывается напряжением постоянного тока 27В и переменного трехфазного тока 36В, 400Гц. Погрешность указателя текущего курса составляет не более ±1 ° . Погрешность счетчика дальности составляет не более ±1 км в диапазоне от 0 до 25 км и не более ±3 км в диапазоне от 25 до 999 км. Масса прибора не более 3,5 кг.
Лицевая часть ПНП-72-12 представлена на рис.3.6. ШШ-72-12 имеет:
1) Две магнитоэлектрические системы, выходными звеньями которых являются:
- в боковом канале - стрелка (6) отклонения от равносигнальной зоны курсового радиомаяка (КРМ);
- в продольном канале - стрелка (4) отклонения от равносигнальной зоны глиссадного радиомаяка (ГРМ).
2) Магнитоэлектрические бленкеры (сигнализаторы) с флажками 12,13 и 14.
3) Два указателя (сигнализатора) нерабочего состояния счетчиков дальности и заданного путевого угла (ЗПУ), которые представляют собой втяжные электромагнитные бленкеры (их шторки - соответственно 9 и 11).
4) Пять следящих систем, выходными звеньями которых являются:
-канала текущего курса - подвижная шкала 1 относительно неподвижного индекса 2;
-канала заданного путевого угла - счетчик ЗПУ (10) и стрелка ЗПУ (3) относительно подвижной шкалы 1;
-канала текущего азимута (или КУР)- стрелка 17 относительно шкалы 16;
-канала дальности - счетчиков дальности 8;
-канала угла сноса - подвижный индекс 15 угла сноса относительно шкалы 16.
Каждая из этих следящих светел состоит из:
-приемника - синусного-косинусного трансформатора (СКТ-220-1П);
-усилителя переменного тока (типа УСС-2);
-двигателя-генератора (типа ДНМ-0.25Д);
-редуктора (зубчатая передача).
Кроме вышеперечисленного прибор ПНП-72-12 имеет внутренний тест-контроль, который запускается при нажатии на кнопку 19 "ТЕСТ".

Рис.3.6. Лицевая часть ПНП-72-12