

пОСОБИЯ а4 / Приборы / т16 Агрегаты и режимы работы САУ а4 / Альбом схем по теме 16
.doc
Рис. 1.1 Внешний вид датчика МУ-615А
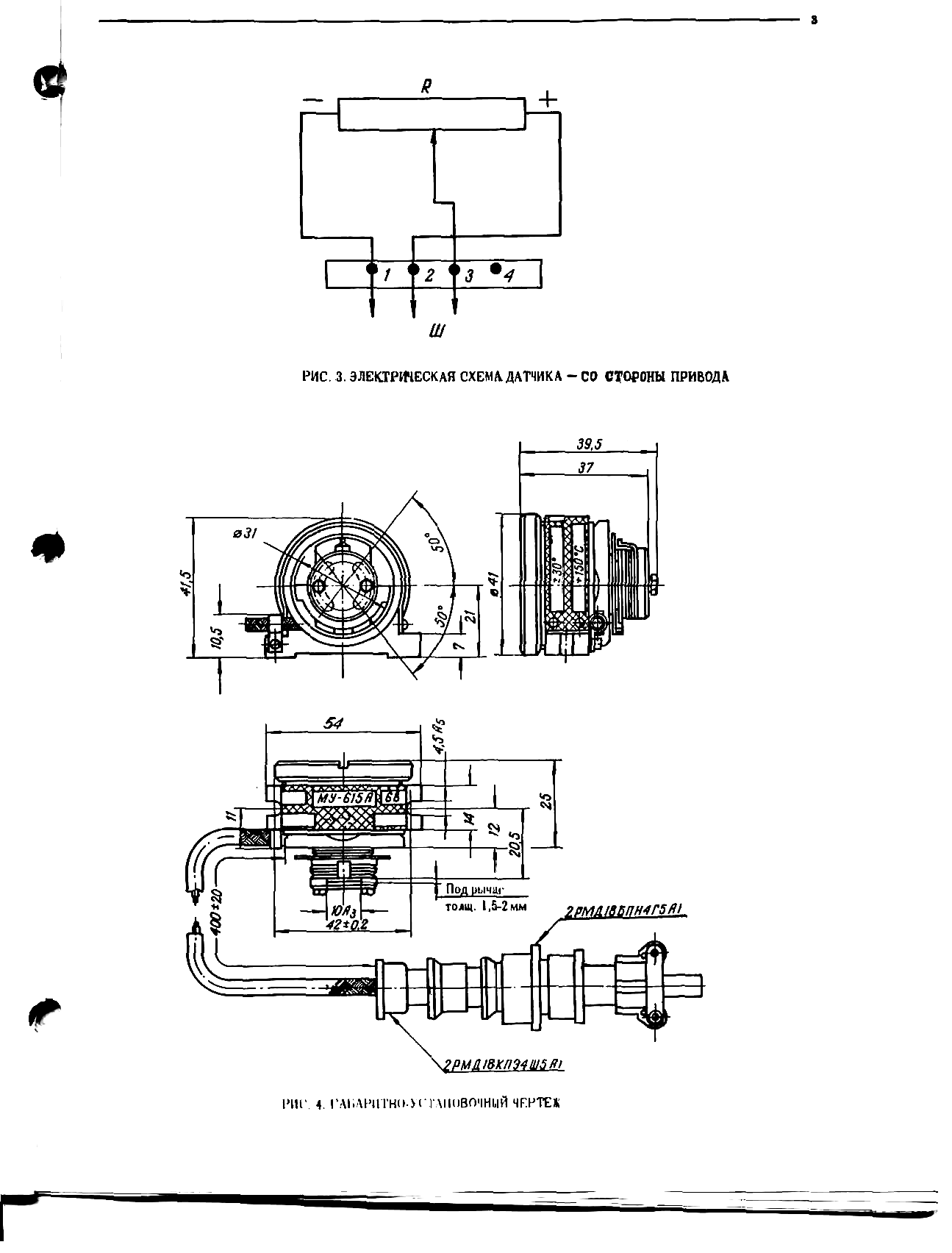
Рис. 1.3. Электрическая схема датчика – со стороны привода
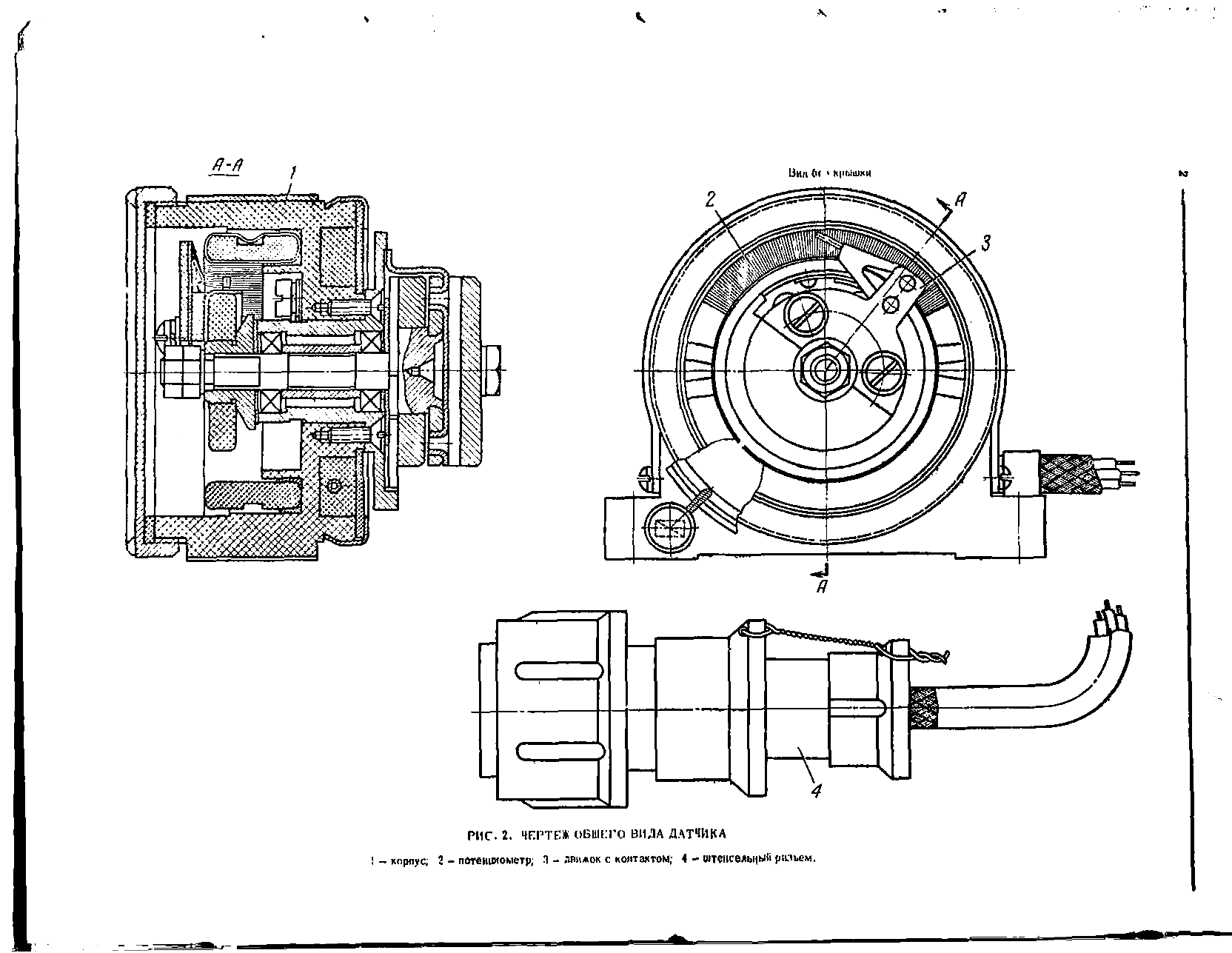
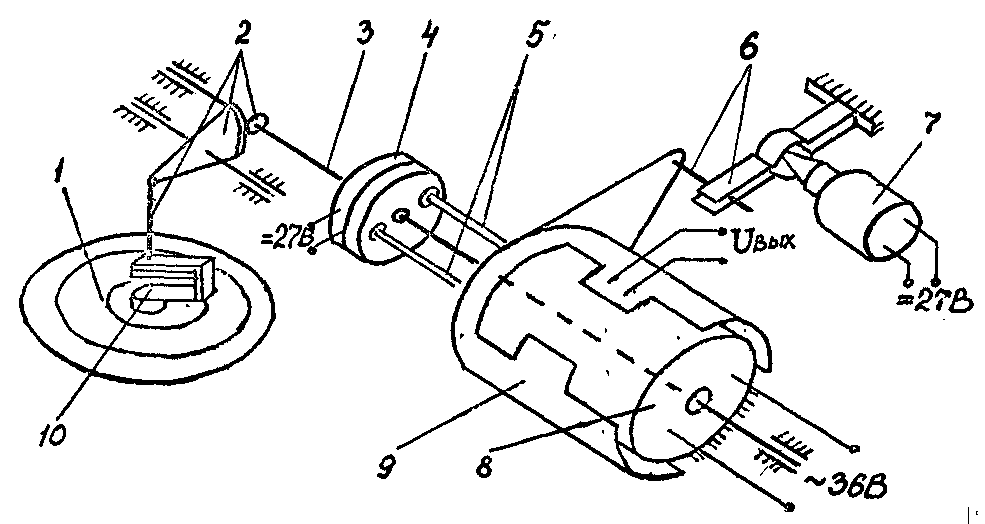
Рис. 1.2. Чертёж общего вида датчика
1 – корпус; 2 – потенциометр; 3 – движок с контактом; 4 – штепсельный разъём.
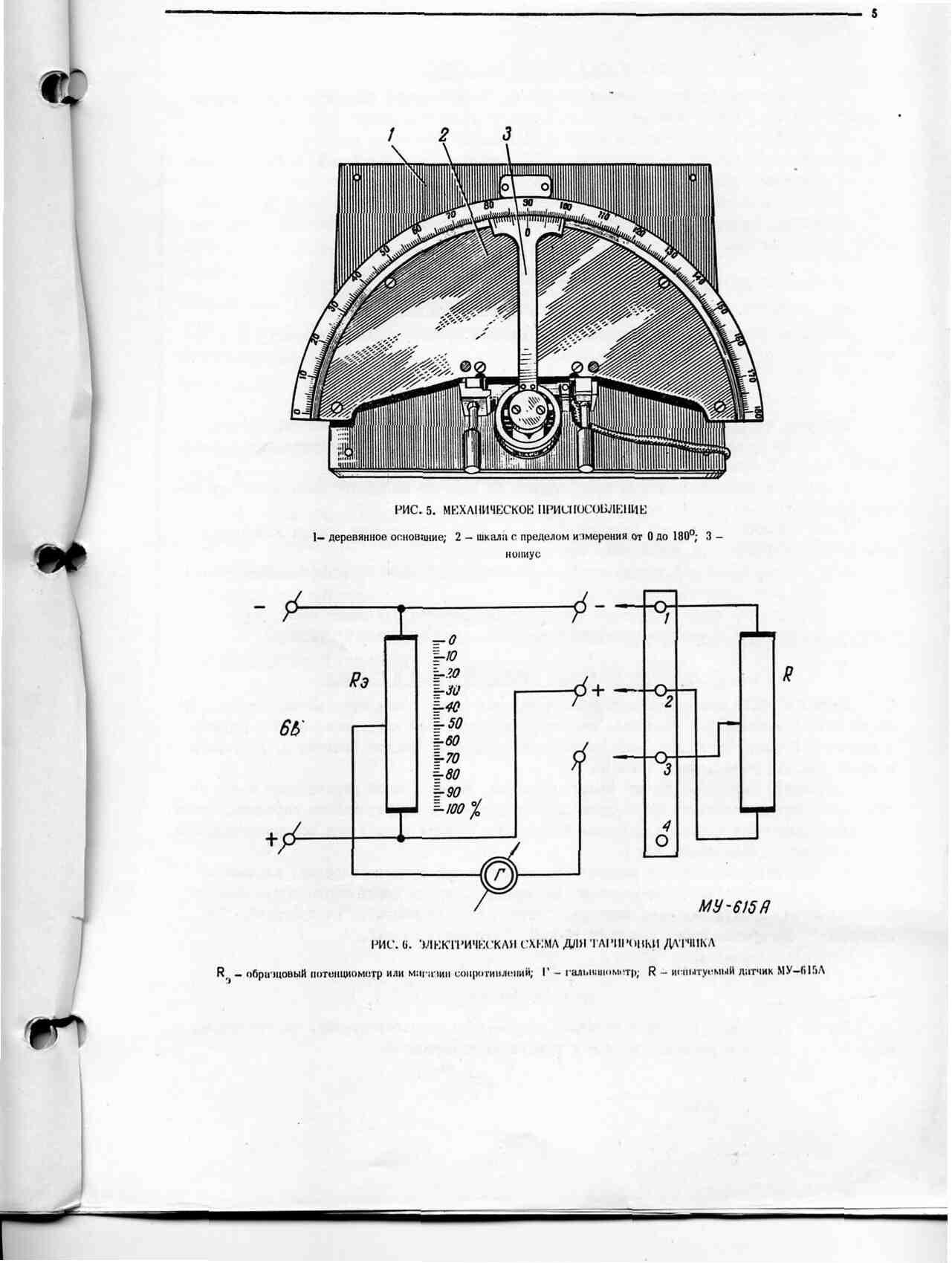
Рис. 1.4. Механическое приспособление
1 – деревянное основание; 2 – шкала с пределом измерения от 0º до 180º; 3 – нониус.
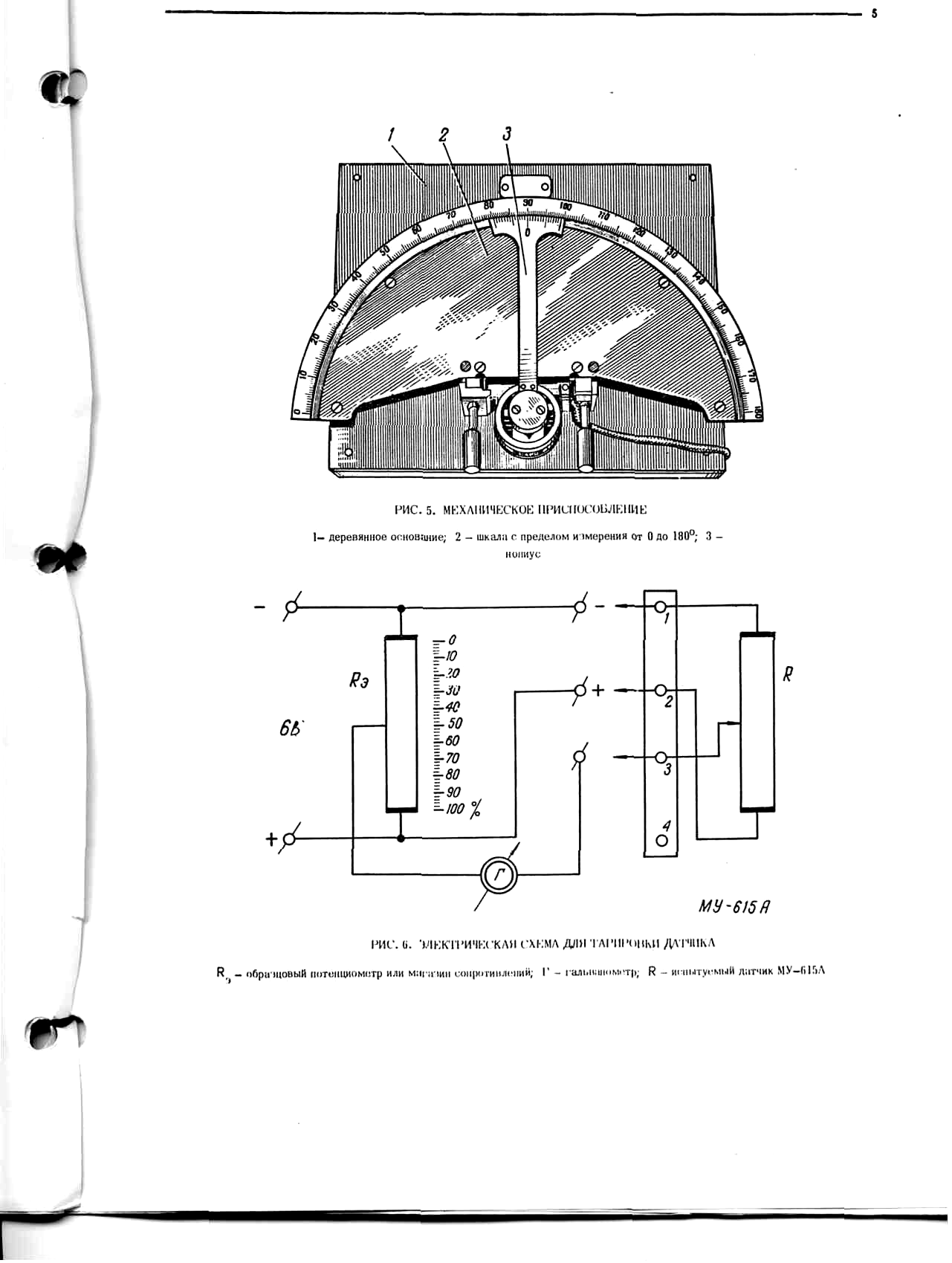
Рис. 1.5. Электрическая схема для тарировки датчика
Rэ – образцовый потенциометр или магазин сопротивлений; Г – гальванометр; R – испытуемый датчик МУ-615А.
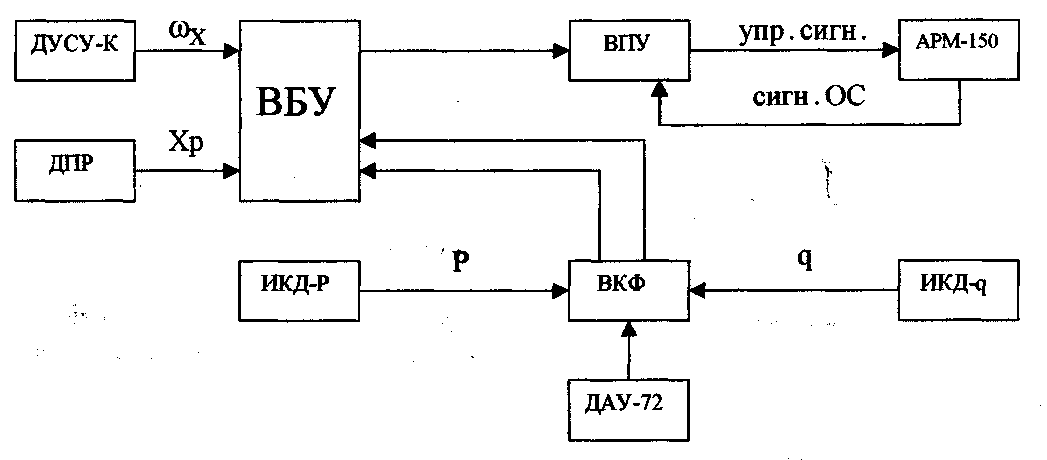
Рис.2.1: Блок — схема прохождения сигналов в канале элеронов
в режиме ДЕМПФЕР
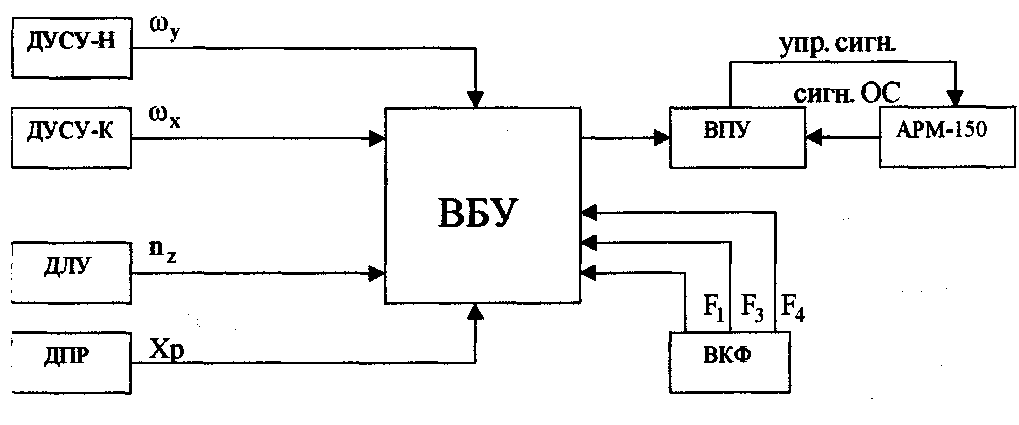
Рис.2.2 Блок—схема прохождения сигналов в канале руля направления, где ДЛУ — датчик линейных ускорений.
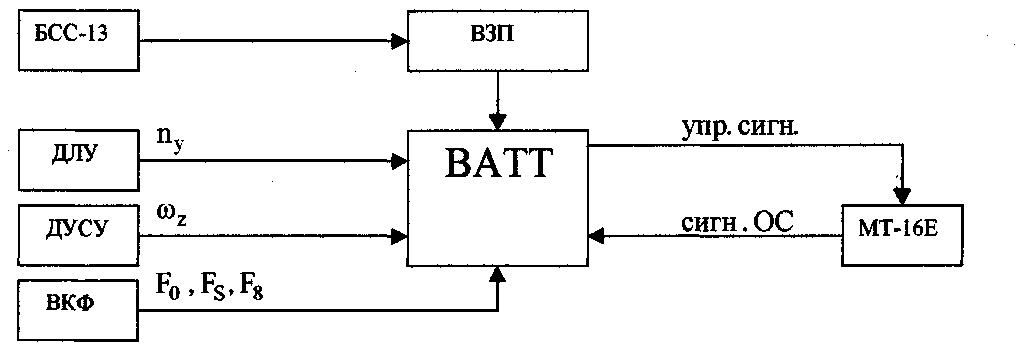
Рис.2.3 Блок — схема прохождения сигналов в канале стабилизатора в режиме СТАБИЛИЗАЦИЯ
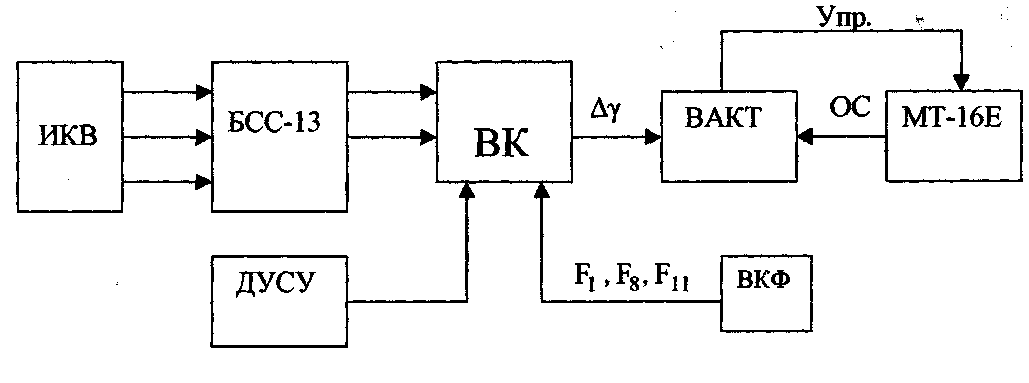
Рис.2.4: Блок — схема прохождения сигналов в канале элеронов в режиме СТАБИЛИЗАЦИЯ
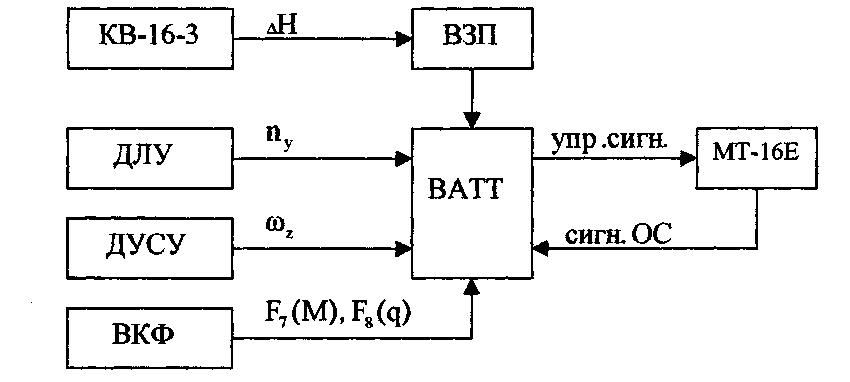
Рис.2.5: Блок-схема прохождения сигналов в канале стабилизатора в режиме СТАБИЛИЗАЦИЯ ВЫСОТЫ
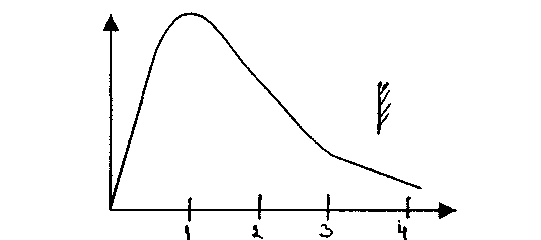
Рис.2.6: переходный процесс отклонения стабилизатора при уводе с опасной высоты
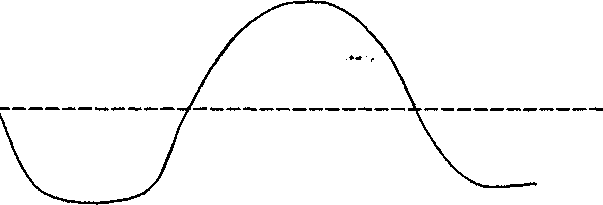
Рис.3.1 Колебание угла установки каждой лопасти при отклонениях подшипника автомата перекоса в течении полного оборота, относительно общего шага винта НВ
Рис. 3.2
Рис. 3.3
Рис. 3.4
а) б)
Рис. 3.5
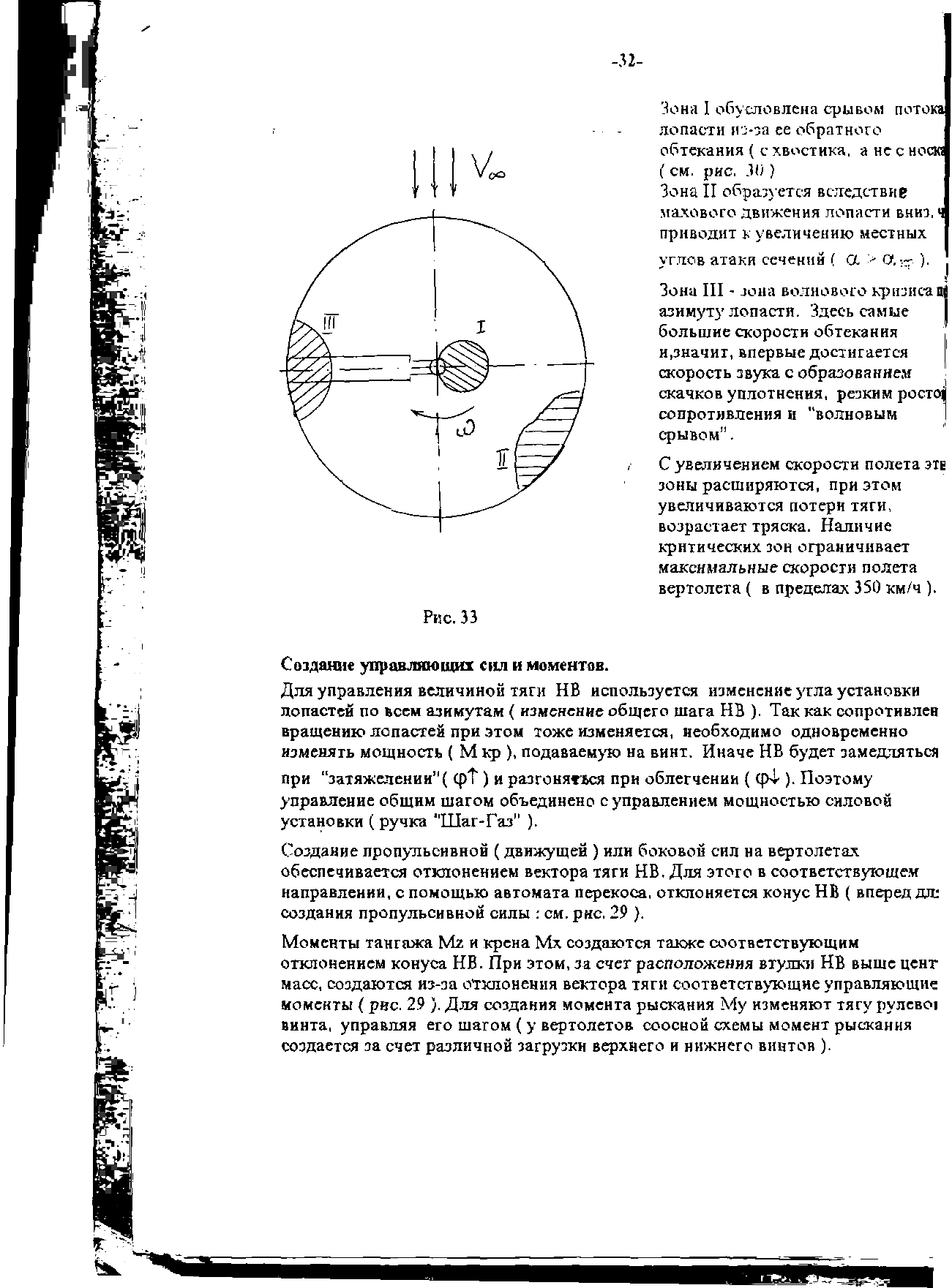
Рис. 3.7
Рис. 3.8
Кинематическая схема корректора высоты KB-I6.
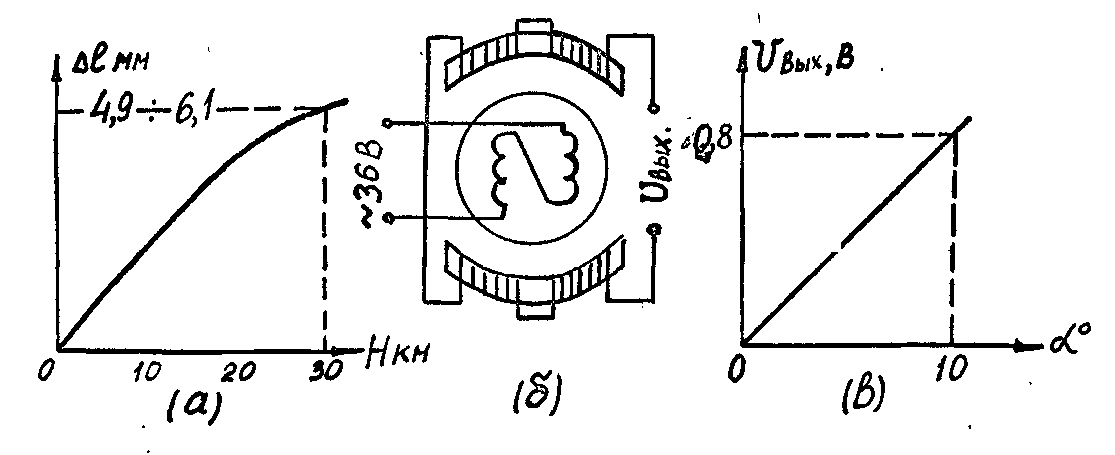
Характеристики: а) анероидной коробки; в) индукционного датчика; б) схема индукционного датчика