

4. Гироскоп с внутренним кардановым подвесом
Схема такого
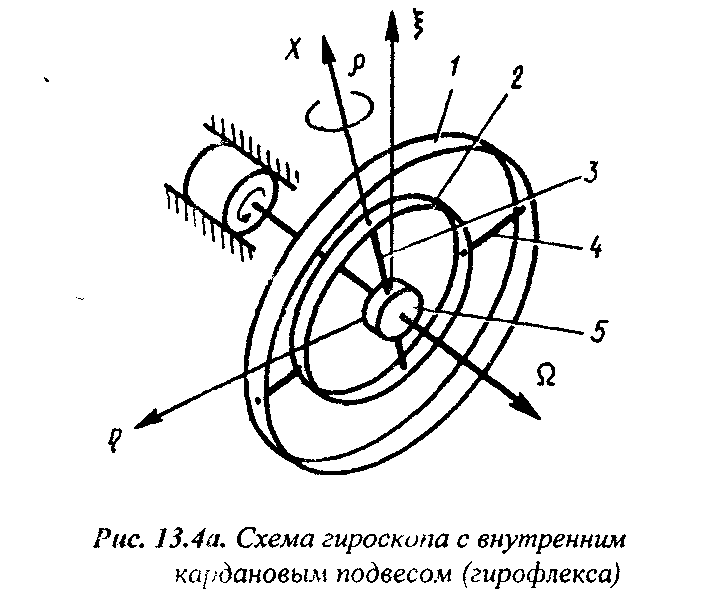
гироскопа (гирофлекса) показана на рис.
13.4а. Ротор 1 и хмежуточное
кольцо 2 соединены с валом 5 электродвигателя
упругими г.ментами
- торсионами 3 и 4, работающими на кручение.
Поэтому при >вороте
ротора, например, по оси X
торсиона 3 на малый угол на ротор действует
момент упругого подвеса
![]()
![]()
который противодействует повороту ротора. Здесь Е- жесткость торсиона (упругого подвеса).
Ротор 1 и промежуточное кольцо 2 приводят во вращение с постоянной скоростью , при этом динамика движения промежуточного кольца 2 такова, что от него на ротор действует момент ,который называют динамическим Мдин. Доказано, что этот динамический момент пропорционален углу поворота ротора. Так, для поворота па угол по оси X. Динамический момент равен
![]()
![]()
где К - коэффициент, зависящий от размеров кольца 2 и угловой скорости .
Таким образом, на
ротор 1 действует одновременно два
момента: упругий и динамический. Суммарный
момент
![]() с учетом (13. Зв) и (13.Зг)
равен Мск
= ( К - Е)*.
Если подобрать размеры промежуточного
кольца,
скорость вращения и жесткость Е таким
образом, чтобы выполнить условие
с учетом (13. Зв) и (13.Зг)
равен Мск
= ( К - Е)*.
Если подобрать размеры промежуточного
кольца,
скорость вращения и жесткость Е таким
образом, чтобы выполнить условие
K-E=0 (13.3д)
То суммарный
момент, действующий на ротор, также
будет равен нулю, т. е.![]() = 0. Аналогичная ситуация имеет место и
для оси Y
подвеса гироскопа.
= 0. Аналогичная ситуация имеет место и
для оси Y
подвеса гироскопа.
Условие (13.3д) называют условием динамической настройки гироскопа. Оно означает, что возможна взаимная компенсация упругого и динамического моментов, действующих на ротор гироскопа. Другими словами, при выполнении динамической настройки подвес ротора становится безмоментным т.е. идеальным для гироскопа. По этой причине у динамически настроенных гироскопов (ДНГ) дрейф может быть меньше, чем у обычных гироскопов. Кроме того, гироскопы данного типа имеют меньшие массу и габаритные размеры. Это объясняет их широкое применение в современных инерциальных авиационных системах и приборах.
1. Погрешности гироскопа, методы их компенсации.
Свободный гироскоп—это идеальный прибор, поскольку на реальный гироскоп всегда действуют вредные моменты, которые приводят к собственному уходу гироскопа с угловой скоростью, определяемой формулой ω=М/Нcos β. (1)
Вредные моменты обусловлены:
— наличием сил трения в опорах (подшипниках) осей наружной и внутренней рам;
— несбалансированностью гироскопа, как в процессе производства, так и в результате эксплуатации (за счет люфтов и деформаций, в том числе и температурных);
— силами упругости («тяжения»), создаваемыми токоподводами, и др.
Следовательно, основными причинами собственного ухода (дрейфа) реального гироскопа являются моменты сил трения в опорах, небаланса (дебаланса) и «тяжения» токоподводов.
Современный уровень приборостроения обеспечивает достаточно малые значения угловой скорости собственного ухода гироскопов, равные 0,1—2 градус/ч и менее, поэтому трехстепенные астатические гироскопы практически считают свободными.