

3. Движение гироскопа под действием внешних сил
Рассмотрим конкретный случай поведения гироскопа, находящегося под действием приложенного к нему момента внешних сил. Представим себе гироскоп в карданном подвесе, вращающийся с большой угловой скоростью и вокруг собственной оси. Пусть главная ось гироскопа XX и ось утренней рамы гироскопа УУ расположены в горизонтальной плоскости, а ось вращения внешней рамы 22 направлена по вертикали вверх (рис. 6). Допустим,
Что к внутренней раме гироскопа приложена постоянная по величине и направлению сила Р. Сила F создаст момент Му, который будет стремиться повернуть ротор гироскопа относительно оси УУ
внутренней рамы. По своему характеру это будет переносное движение, в результате которого возникнет гироскопический момент
M![]() =
J
=
J![]() ,
,
действующий относительно оси ZZ. Под действием момента
M![]() ротор гироскопа совместно с внутренней
рамой будет поворачиваться относительно
оси
ZZ
с угловой скоростью
ротор гироскопа совместно с внутренней
рамой будет поворачиваться относительно
оси
ZZ
с угловой скоростью![]() .
Это вращение (переносное движение) в
свою очередь вызовет второй гироскопический
момент Му
действующий относительно оси УУ. Величина
этого момента равна
.
Это вращение (переносное движение) в
свою очередь вызовет второй гироскопический
момент Му
действующий относительно оси УУ. Величина
этого момента равна
M![]() = J
= J![]() sin
sin![]() ,
,
Где
![]() —
угол, заключенный между осями собственного
и вынужденного вращений.
—
угол, заключенный между осями собственного
и вынужденного вращений.
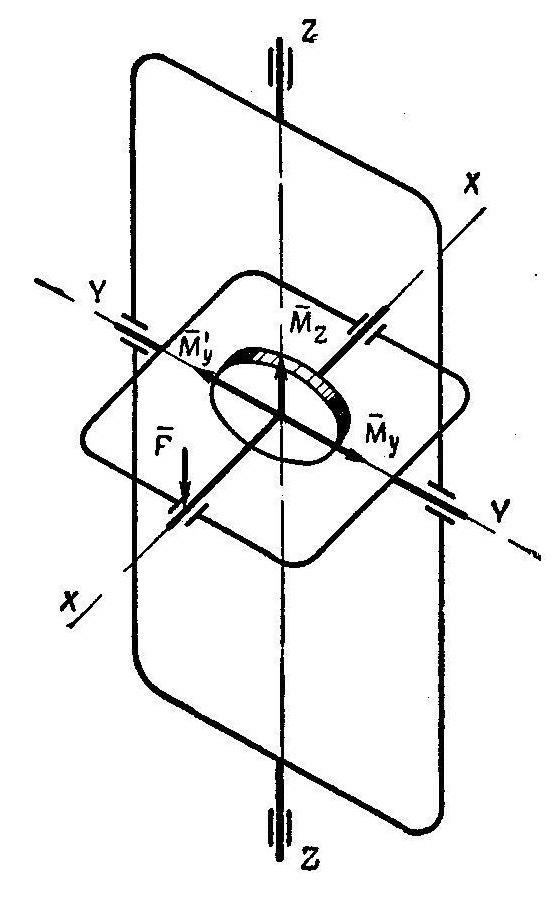
рис.6
Момент
М’у![]() противоположен моменту Му,
созданному внешней силой F.
Пока Му>
М’'
противоположен моменту Му,
созданному внешней силой F.
Пока Му>
М’'![]() величина
величина
![]() будет возрастать, а вместе с ней будут
расти гироскопический момент М
будет возрастать, а вместе с ней будут
расти гироскопический момент М![]() ,
угловая скорость
,
угловая скорость![]() и моментМ'у.
Когда М'
и моментМ'у.
Когда М'
![]() Му,
Му,
![]() начнет убывать, сохраняя свое направление,
а гироскопический моментM
начнет убывать, сохраняя свое направление,
а гироскопический моментM![]() действующий в прежнем направлении,
будет увеличивать угловую скорость
вращения
действующий в прежнем направлении,
будет увеличивать угловую скорость
вращения
![]() .
Когда угловая скорость
.
Когда угловая скорость
![]() будет равна нулю,
будет равна нулю,
угловая
скорость
![]() будет наибольшей. Затем угловая скорость
будет наибольшей. Затем угловая скорость
![]() изменит
свое направление, так как ось ротора
под действием разности моментов М'
изменит
свое направление, так как ось ротора
под действием разности моментов М'![]() и М
и М![]() начнет подниматься ускоренно. При
этом
гироскопический момент M
начнет подниматься ускоренно. При
этом
гироскопический момент M![]() также
изменит свой знак и
будет
замедлять движение внешней рамы
гироскопа, а угловая скорость
также
изменит свой знак и
будет
замедлять движение внешней рамы
гироскопа, а угловая скорость
![]() будет уменьшаться. ПокаМ'у
>Му,
ось ротора поднимается ускоренно,
угловая скорость
будет уменьшаться. ПокаМ'у
>Му,
ось ротора поднимается ускоренно,
угловая скорость
![]() возрастает, поэтому возрастает момент
М
возрастает, поэтому возрастает момент
М![]() ,
тормозящий движение внешней рамы
гироскопа, и угловая скорость
,
тормозящий движение внешней рамы
гироскопа, и угловая скорость![]() уменьшается. Когда уменьшающийся
гироскопический моментМ'
уменьшается. Когда уменьшающийся
гироскопический моментМ'![]() станет меньше Му,
движение внутренней и внешней рам начнет
замедляться, пока угловые скорости
станет меньше Му,
движение внутренней и внешней рам начнет
замедляться, пока угловые скорости
![]() и
и
![]() не будут равны нулю. С этого момента все
явления будут повторяться в той же
последовательности. В итоге под действием
момента внешних сил ось ротора гироскопа
будет совершать сложное движение,
называемое псевдорегулярной прецессией.
Результирующее движение оси ротора
гироскопа под действием момента внешних
сил представлено на рис. 7. Как видно из
рисунка, под действием момента внешней
силы ось ротора гироскопа будет совершать:
не будут равны нулю. С этого момента все
явления будут повторяться в той же
последовательности. В итоге под действием
момента внешних сил ось ротора гироскопа
будет совершать сложное движение,
называемое псевдорегулярной прецессией.
Результирующее движение оси ротора
гироскопа под действием момента внешних
сил представлено на рис. 7. Как видно из
рисунка, под действием момента внешней
силы ось ротора гироскопа будет совершать:
а) вращательное движение вокруг оси ZZ в одном направлении с постоянной угловой скоростью, которое называется регулярной прецессией;
б)
периодические колебания относительно,
оси УУ, которые называются нутацией.
Нутация представляет собой такие
периодические колебания, при которых
ось ротора гироскопа вращается около
направления, неподвижного в абсолютном
пространстве, с постоянной угловой
скоростью и описывает в пространстве
круглый конус с малым углом раствора.
При достаточно большой угловой скорости
![]() собственного вращения ротора гироскопа
амплитуда нутации оказывается настолько
незначительной, что совершенно незаметна
глазом. При наблюдении за поведением
гироскопа будет замечено только
регулярное движение, т. е. непрерывное
перемещение главной оси гироскопа.
Однако следует заметить, что нутационные
колебания главной оси гироскопа при
действии момента внешних сил имеют
существенное практическое значение,
так как они вызывают вибрацию рамок
карданного подвеса, создают тяжелые
условия для работы шарикоподшипников
и приводят к преждевременному их износу.
собственного вращения ротора гироскопа
амплитуда нутации оказывается настолько
незначительной, что совершенно незаметна
глазом. При наблюдении за поведением
гироскопа будет замечено только
регулярное движение, т. е. непрерывное
перемещение главной оси гироскопа.
Однако следует заметить, что нутационные
колебания главной оси гироскопа при
действии момента внешних сил имеют
существенное практическое значение,
так как они вызывают вибрацию рамок
карданного подвеса, создают тяжелые
условия для работы шарикоподшипников
и приводят к преждевременному их износу.
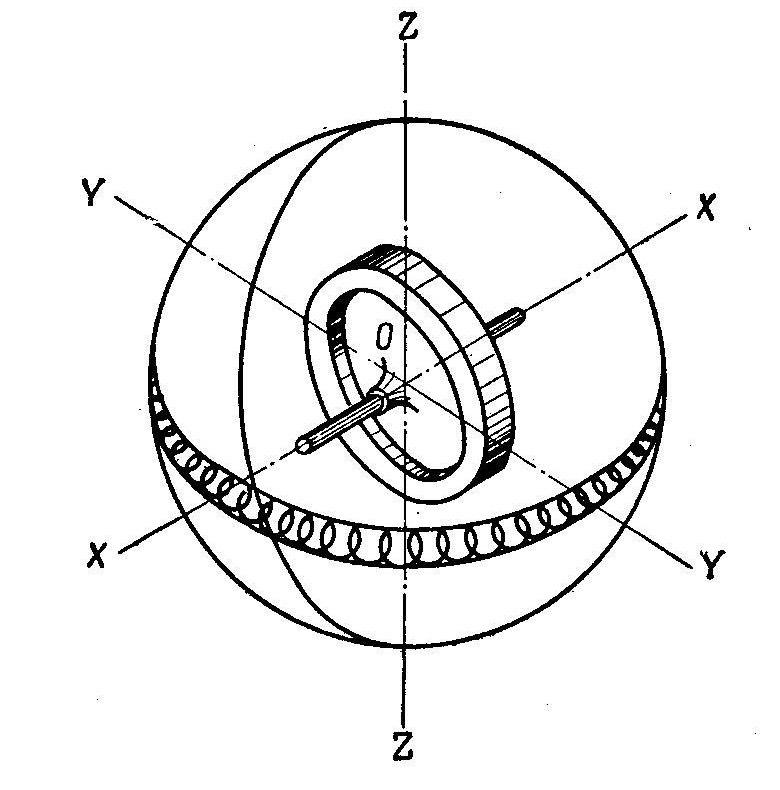
рис.7
Выше
мы рассмотрели случай, когда внешняя
сила приложена к оси внутренней рамы.
Если сила F
будет приложена к внешней раме гироскопа,
то она создаст момент М![]() ,
который будет стремиться повернуть
гироскоп относительно оси ZZ.
При этом появится гироскопический
момент М
,
который будет стремиться повернуть
гироскоп относительно оси ZZ.
При этом появится гироскопический
момент М![]() ,
под действием которого будет происходить
прецессионное движение гироскопа
(вокруг оси УУ— регулярная прецессия,
вокруг оси ZZ
— нутационные
колебания).
,
под действием которого будет происходить
прецессионное движение гироскопа
(вокруг оси УУ— регулярная прецессия,
вокруг оси ZZ
— нутационные
колебания).
Прецессионное движение гироскопа характеризуется углом поворота главной оси гироскопа в единицу времени. Величина скорости прецессии определяется из выражения (13.1):
![]()
![]()
![]()
![]() =M
=M![]() /J
/J![]()
![]() (13.4)
(13.4)
или
![]() =
М
=
М![]() /J
/J![]()
![]() ,
,
(13.5)
где
![]()
![]() и
и![]() — угловая скорость прецессии;
— угловая скорость прецессии;
М![]() момент
внешней силы, действующий относительно
оси ZZ;
момент
внешней силы, действующий относительно
оси ZZ;
Му—момент внешней силы, действующий относительно оси УУ;
J![]() —
момент инерции ротора;
—
момент инерции ротора;
![]() — угловая
скорость вращения ротора.
— угловая
скорость вращения ротора.
Из
выражений (13.4) и (13.5) видно, что величину
угловой скорости прецессии
![]() можно значительно уменьшить увеличением
кинетического момента инерции ротора
и уменьшением момента внешней силы.
Если добиться такого положения, что
величина момента внешней силы будет
весьма незначительной, а величина
кинетического момента ротора будет
достаточно большой, то угловая скорость
прецессии будет близка к нулю, и тогда
при всех эволюциях основания главная
ось гироскопа будет сохранять свое
первоначальное положение неизменным
в пространстве. Это свойство гироскопа
широко используется в приборах для
выдерживания какого-либо заранее
установленного положения его главной
оси.
можно значительно уменьшить увеличением
кинетического момента инерции ротора
и уменьшением момента внешней силы.
Если добиться такого положения, что
величина момента внешней силы будет
весьма незначительной, а величина
кинетического момента ротора будет
достаточно большой, то угловая скорость
прецессии будет близка к нулю, и тогда
при всех эволюциях основания главная
ось гироскопа будет сохранять свое
первоначальное положение неизменным
в пространстве. Это свойство гироскопа
широко используется в приборах для
выдерживания какого-либо заранее
установленного положения его главной
оси.
Вставить гирофлекс.
РЕПНИКОВ,
ПОСОБИЕ