

Основные проверяемые характеристики
1. Время готовности не более 1,5 мин
2. Потребляемый ток:
- от источника 36 В, 400 Гц в фазах I и II не более 0,9 А
в фазе III …не более 0,8 А
- от источника = 27В …не более 0,3А
3. Скорость процессии гироскопа под действием по-
перечной и продольной коррекции 1,8-6 градус/мин
4. Уход гироскопа по крену и тангажу за 5 мин.
на качающемся основании с выключенной
коррекцией …не более ±2,5°
5. Точность выдерживания вертикали по крену и
тангажу при выключенной коррекции на углах
от 0° до 30° …не хуже ±1°
Проверяется также работа сигнализатора отказа питания.
Для проверок используется поверочная аппаратура ПА-АГД, установка УПГ-48 для проверки гироскопов ламповой вольтметр ВЗ-2А, секундомер.
Авиагоризонт дистанционный АГД-1. Авиагоризонт дистанционный АГД-1 предназначен для определения положения летательного аппарата в пространстве относительно плоскости истинного горизонта и для определения наличия и направления скольжения.
Кроме индикации углов крена и тангажа авиагоризонт выдает электрические сигналы, пропорциональные углам крена н тангажа, на другие потребители (курсовые системы, радиолокационные станции и т. и.).
Авиагоризонт относится к приборам, непосредственно влияющим на безопасность полета, поэтому к его надежности предъявляются повышенные требования. Часто в целях резервирования авиагоризонты дублируют.
В состав комплекта авиагоризонта входят один гиродатчик — агрегат 458 и один или два указателя—агрегат 1122 А (Б). Допускается подключение дополнительных указателей.
Для нормальной работы авиагоризонта необходимо наличие выключателя поперечной коррекции.
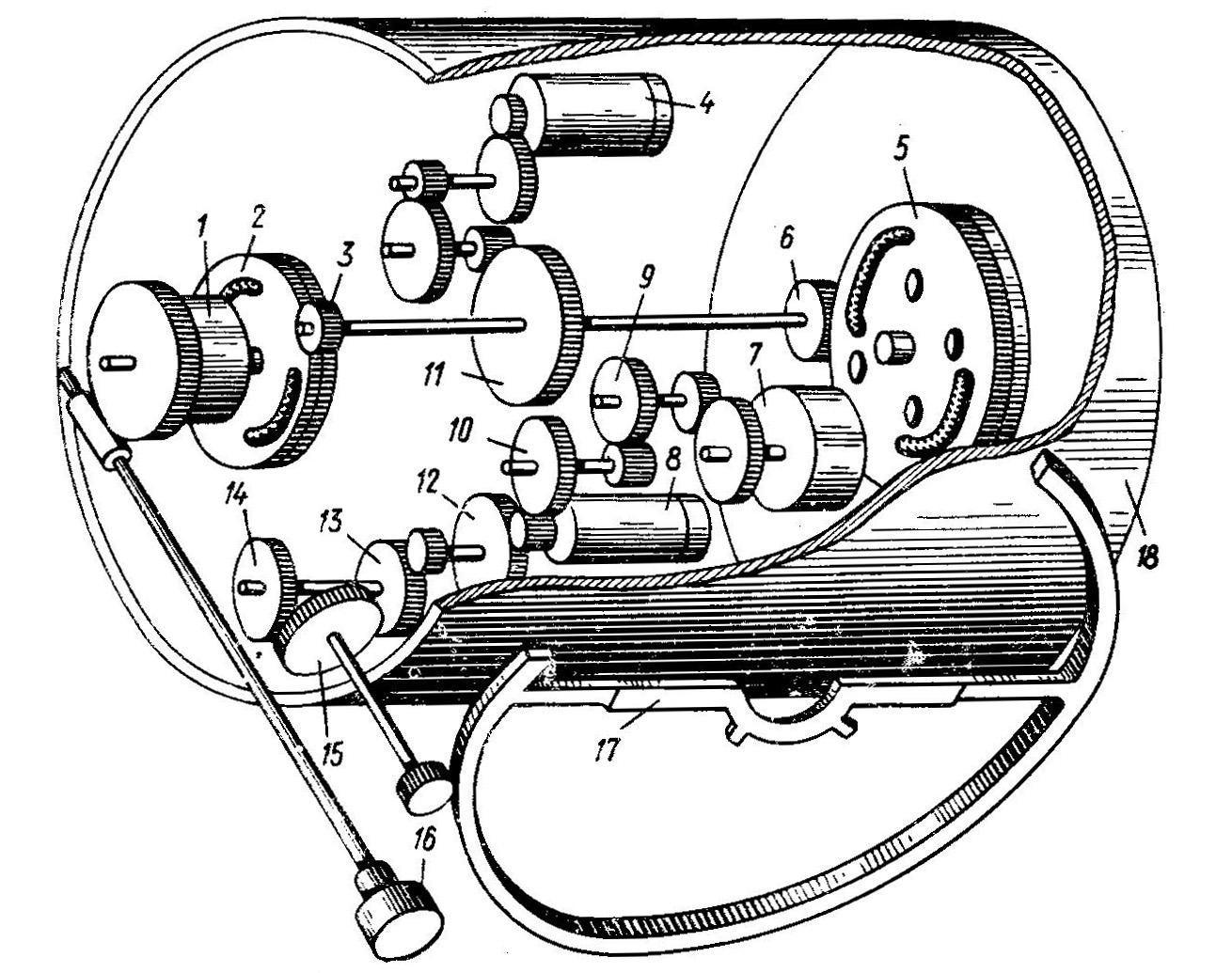
Гиродатчик. Кинематическая схема гиродатчика показана на рис. . Кинематическая схема гиродатчика делится на несколько частей. Гироскопическая система является чувствительной частью гиродатчика. Она включает в себя гироскоп 4, главная ось которого устанавливается вдоль истинной вертикали. Кожух гиромотора является внутренней рамой 3. Внутренняя рама на своей оси закреплена с. помощью подшипников в наружной раме 2. Гироскоп с внутренней рамой составляют гироузел.
Внешняя рама закреплена на подшипниках в следящей раме 1 и может поворачиваться относительно этой рамы вокруг своей оси. Ось следящей рамы расположена параллельно продольной оси самолета и вращается относительно корпуса вокруг оси Y.
Рабочее состояние гироскопической системы в горизонтальном полете следующее: главная ось гироскопа направлена вдоль истинной вертикали, ось внутренней и следящей рамы параллельна продольной оси самолета, ось внешней рамы параллельна поперечной оси самолета.
Система отключения коррекции. При прямолинейном и равномерном полете самолета на жидкость в ДЖМ не действуют никакие силы, кроме силы тяжести. Под действием этой силы жидкость в ДЖМ установится горизонтально. Если самолет выполняет разворот вокруг вертикальной оси с некоторой угловой скоростью w, то кроме силы тяжести на жидкость в поперечном ДЖМ будет действовать центробежная сила. Равнодействующая силы тяжести и центробежной силы направлена под углом к истинной вертикали. Жидкость в ДЖМ перемещается под действием центробежной силы, вводя сигнал ложной коррекции. Система коррекции стремится увести главную ось гироскопа от истинной к «кажущейся» вертикали.

Под воздействием ускорений (замедлений), действующих на самолет вдоль его продольной оси, на жидкость в продольном ДЖМ действует сила инерции и уводит его от истинной вертикали.
В силу вышеизложенных причин необходимо отключать систему продольной коррекции на время действия ускорений и систему поперечной коррекции на время выполнения самолетом разворотов i! виражей. Эти функции в гиродатчикс авиагоризонта АГД-1 выполняют два выключателя коррекции жидкостных (ВКЖ), контакты выключателя коррекции ВК.-53 (или ВК-90) и ламельное устройство К 1.
Поперечная коррекция отключается выключателем поперечной коррекции ВК-53 при угловых скоростях разворота w≥0,3 град/с.
Если самолет производит разворот с малой угловой скоростью и большим радиусом, выключатель коррекции может не среагировать. В этом случае поперечная коррекция отключается коммутатором К1. Щетки коммутатора расположены на корпусе гиродатчика, ламельный диск закреплен на оси следящей рамы. При крене самолета γ ==-±10° и более щетки коммутатора перемещаются на изолированные ламели и цепь питания управляющих обмоток поперечного коррекционного мотора ПК разрывается.
Отключение продольной коррекции производится с помощью двух выключателей коррекции жидкостных (рис. ). ВКЖ представляет собой герметичный стеклянный цилиндрический сосуд, заполненный токопроводящей жидкостью, с одной стороны которого впаяны два контакта. Сосуды установлены сверху на кожухе гиромотора под наклоном так, что контакты обоих выключателей находятся в нижней части, в верхней части находится пузырек воздуха.
При разгоне или торможении самолета жидкость под действием силы инерции перемещается, заставляя перемещаться пузырек воздуха. При достижении ускорением величины 1,67 м/с2 пузырек воздуха перекрывает контакт, и сопротивление ВКЖ резко возрастает. При этом скорость коррекции резко уменьшается. При дальнейшем увеличении ускорения продольная коррекция остается отключенной. Обратное срабатывание (включение) ВКЖ происходит при уменьшении горизонтальной составляющей ускорения до величины 1,05 м/с2. ВКЖ расположены так, что один из них реагирует на ускорение, другой - на торможение.
Система отработки следящей рамы служит для предотвращения выбивания гироскопа. Выбивание гироскопа произойдет при совмещении главной оси гироскопа с осью внешней рамы. Система отработки следящей рамы поддерживает перпендикулярность между этими осями.
В состав системы входят: индукционный датчик (ИД), который является чувствительным элементом системы; полупроводниковый усилитель; двигатель-генератор (ДГ) с редуктором (исполнительный элемент). Якорь индукционного датчика закреплен на оси внутренней рамы, трехстержневой Ш-образный статор закреплен на внешней раме. Двигатель-генератор может поворачивать следящую раму вокруг ее оси на 360°.
При горизонтальном полете главная ось гироскопа направлена вдоль истинной вертикали, ось внешней рамы перпендикулярна главной оси, якорь индукционного датчика расположен симметрично статору. На среднем сердечнике статора намотана обмотка подмагничивания, которая запитывается переменным напряжением 36 В частотой 400 Гц. В обмотках управления статоpa, намотанных на крайних сердечниках статора и включенных последовательно и встречно, наводятся ЭДС, которые взаимно компенсируют друг друга. В результате выходное напряжение индукционного датчика равно нулю. Двигатель-генератор не вращается.
При накренениях самолета возможны повороты следящей рамы, приводящие к соответствующим поворотам внешней рамки вокруг оси гироузла, что обусловит ненулевой сигнал индукционного датчика. Этот сигнал после усиления подается на двигатель-генератор. Двигатель-генератор начинает вращаться и через редуктор поворачивает следящую раму и вместе с ней внешнюю раму в сторону, противоположную крену самолета, до тех пор, пока сигнал с индукционного датчика не станет равным нулю, что свидетельствует о перпендикулярности между главной осью гироскопа и осью внешней рамы. Сигнальная обмотка тахогенератора включена на вход усилителя встречно с сигналом индукционного датчика и обеспечивает гибкую отрицательную обратную связь.
При эволюциях самолета, когда угол тангажа превышает ±90°, следящая рама изменяет свое положение относительно внешней рамы на противоположное. Для правильной отработки следящей рамы в этом положении фаза напряжения, снимаемого с индукционного датчика, изменяется на 180° с помощью коммутатора К2 и реле РЗ (рис. ).
Система арретирования предназначена для быстрого приведения гироскопической системы в рабочее положение.
В результате арретирования следящая рама устанавливается параллельно основанию гиродатчика, внешняя рама устанавливается параллельно следящей, гироузел устанавливается так, что главная ось гироскопа станет перпендикулярна плоскости внешней рамы.
Система арретирования включает следующие элементы: двигатель переменного тока ДМ-1 с редуктором; шток; толкатель; стержень с возвратными пружинами; три кулачка (кулачок следящей рамы, кулачок внешней рамы и кулачок гироузла).
Арретирование гиродатчика производится в двух случаях: при запуске гиродатчика и при нажатии на кнопку указателя с надписью «Арретировать только в гориз. полете».
Проследим за взаимодействием элементов системы арретирования.
Предположим, что гироузел и внешняя рама повернуты на произвольный угол, а следящая рама находится в произвольном положении. Для арретирования необходимо подать напряжение на двигатель ДМ-1. Двигатель через редуктор проворачивает выходную шестерню, снабженную пальцем, который выдвигает шток, перемещаясь по винтовой канавке на его поверхности.
Шток давит на торцевой кулачок, профиль которого образует две симметричные ветви винтовой линии. При нажатии на кулачок следящая рама приводится в такое положение, при котором ее плоскость параллельна основанию гиродатчика, после чего шток соскальзывает с кулачка и проваливается в отверстие в следящей раме, фиксируя ее в этом положении. При дальнейшем перемещении шток давит на толкатель, который перемещается и своим выступающим концом давит на кулачок внешней рамы. Последний, поворачиваясь, поворачивает за собой внешнюю раму до тех пор, пока ее плоскость не станет параллельна плоскости следящей рамы и не зафиксируется, войдя в вырез. Двигаясь дальше, толкатель своим кулачком, расположенным в задней части, нажимает на стержень. Стержень перемещается и давит на кулачок гироузла, который, поворачивая гироузел вокруг оси внутренней рамы, приводит главную ось гироскопа в положение, перпендикулярное плоскости внешней рамы, и фиксирует ее в этом положении.
После того как выходная шестерня сделает один оборот, палец выходной шестерни выйдет из зацепления со штоком и шток, толкатель и стержень вернутся в исходное положение под действием возвратных пружин. Арретирование закончено.
Система выдачи сигналов предназначена для выдачи на указатель и потребителям электрических сигналов, пропорциональных углам крена и тангажа. В качестве датчиков углов крена и тангажа используются сельсины. Ротор сельсина-датчика крена закреплен на оси следящей рамы, статор—на корпусе гиродатчика. Ротор сельсина-датчика тангажа закреплен на оси внешней рамы, статор — на следящей раме.
Запуск гиродатчика. Электрокинематическая схема прибора (рис. ) выполнена так, что авиагоризонт помимо основных источников питания всегда подключен к резервному источнику питания.
При подключении гиродатчика к бортовой сети и источнику переменного напряжения 36 В частотой 400 Гц его запуск осуществляется следующим образом:
1. При включении источников питания напряжение +27 В резервного источника через нормально замкнутые контакты реле Р4 попадает на сигнальную лампу указателя. Лампа загорается, свидетельствуя о том, что прибор подключен к источнику постоянного напряжения, но не готов к работе.
2. Напряжение источника переменного тока через нормально замкнутые контакты реле Р6 и контакты реле Р5 подается на двигатель арретира ДМ-1. Двигатель начинает вращаться, выдвигается шток арретира и арретирует рамы гиродатчика. В конце цикла арретирования толкатель нажимает на микровыключатель В1, через HP контакты которого питание +27 В подается на обмотку реле Р4. Реле Р4 срабатывает и своими контактами подключает I и III фазу источника переменного напряжения к гиромотору, который начинает раскручиваться; II фаза подключена непосредственно к системе коррекции, к роторным обмоткам сельсина-датчика крена и тангажа, к обмотке подмагничивания индукционного датчика. Своими контактами реле Р4 становится на самоблокировку и переключает питание лампы на основной источник постоянного напряжения.
После того как произойдет разарретирование, замкнутся НЗ-контакты микровыключателя В1, которые подают питание на обмотку реле Р5 по цепи самоблокировки реле Р4. Р5 срабатывает и своими НЗ-контактами разомкнет цепь питания двигателя арретира ДМ-1. Другими контактами реле Р5 продублирует контакты реле Р4, подающие напряжение переменного тока на гиродатчик. Своими контактами реле Р5 подает напряжение переменного тока II фазы на обмотку возбуждения двигателя ДГ-1 и на обмотку реле Р6, которое срабатывает, ставит свою обмотку на самоблокировку и дополнительно размыкает цепь питания двигателя ДМ-1. Реле Р6 разрывает цепь питания сигнальной лампы (лампа гаснет) и дополнительно блокирует цепь питания обмоток реле Р4 и Р5.
После этого гироскоп продолжает разгоняться, одновременно система коррекции приводит его ось к истинной вертикали. Приблизительно через 1 мин после включения питания гироскоп приходит к истинной вертикали с требуемой точностью, и его кинетический момент достигает величины, необходимой для нормальной работы прибора.
Повторное арретирование гиродатчика. В некоторых случаях может оказаться необходимым произвести арретирование гиродатчика в полете. Для этой цели на указателе предусмотрена кнопка с надписью «Арретировать только в гориз. полете» (В2).
Арретирование осуществляется кратковременным нажатием кнопки. При этом замыкается цепь питания обмотки реле Р1, реле срабатывает, его контакты размыкаются и разрывают цепь питания обмоток реле Р4 и Р5, реле отпускают. Контакты реле Р1 размыкают цепь питания обмотки реле Р6. Таким образом, замыкаются цепь питания сигнальной лампы и цепь питания двигателя арретира ДМ-1. В дальнейшем работа системы арретиро-вания происходит так же, как было описано выше.
Дистанционный указатель. Дистанционный указатель горизонта (рис. ) воспроизводит углы крена и тангажа самолета, измеряемые гиродатчиком, а также указывает наличие и направление скольжения.
В указателе авиагоризонта АГД-1 показания крена и тангажа разделены.
Крены самолета имитируются поворотом силуэта 17 самолетика. Отсчет углов крена производится по оцифрованной шкале крена, причем стрелкой служит конец крыла самолетика. Для отсчета углов тангажа служит цилиндрическая шкала (картушка), ось вращения которой параллельна поперечной оси самолета. В центральной части силуэта самолетика нанесена белая точка, являющаяся нулевым индексом тангажа. Для обеспечения большей наглядности показаний шкала тангажа выше линии искусственного горизонта окрашена в голубой цвет, а ниже линии искусственного горизонта — в коричневый. Для самолетов, в которых приборы освещаются красным цветом, шкала тангажа выше линии искусственного горизонта окрашена в серый цвет, ниже линии искусственного горизонта - в черный.

Указатель горизонта состоит из двух следящих систем: следящей системы тангажа и следящей системы крена, которые обеспечивают соответствующие перемещения подвижных элементов индикации — картушки и силуэта самолетика.
Следящая система тангажа представляет собой сельсинную дистанционную передачу, работающую в трансформаторном режиме. Сельсин-датчик тангажа, расположенный в гиродатчике, электрически связан с сельсином-приемником 1 тангажа, расположенным в дистанционном указателе. Кроме сельсинов в следящую систему входят усилитель и двигатель-генератор ДГ-0,5 с редуктором.
Следящая система тангажа работает следующим образом. При изменении самолетом угла тангажа гироузел остается в заданном положении и удерживает внешнюю раму, на оси которой закреплен ротор СДυ. Следящая рама, на которой закреплен статор, перемещается вместе с корпусом гиродатчика. Таким образом происходит разворот статора СДυ. относительно ротора. Сигнал рассогласования, пропорциональный углу тангажа самолета, с роторной обмотки сельсина-приемника СПυ подается на вход усилителя, а после усиления—на управляющую обмотку двигателя-генератора 4. Двигатель через редуктор передает вращение картушке 18 и ротору сельсина-приемника. Картушка проворачивается относительно силуэта самолетика, и указатель горизонта воспроизводит углы тангажа. Ротор сельсина-приемника будет поворачиваться до тех пор, пока на входе усилителя сигнал не станет равным нулю, т. е. роторная обмотка сельсина-приемника СПυ не установится перпендикулярно роторной обмотке сельсина-датчика СДυ. При работе двигателя-генератора ДГ-0,5 на сигнальной обмотке тахогенератора появляется напряжение, пропорциональное скорости вращения двигателя. Сигнальная обмотка тахогенератора включена встречно-последовательно с обмоткой ротора сельсина-приемника и в схеме обеспечивает отрицательную обратную связь.
Редуктор следящей системы имеет две передачи: одну - для отработки ротора сельсина-приемника, другую—для отработки картушки. Передаточное отношение от двигателя-генератора на картушку равно 250, а на ротор сельсина-приемника - 424. Одному градусу поворота ротора сельсина (самолета) соответствует 1,7° поворота картушки. Этим обеспечивается увеличенный масштаб отсчета углов тангажа во всем диапазоне шкалы.
Специальный упор ограничивает свободу вращения картушки в пределах ±145°, что по шкале картушки соответствует ±85°. В редукторе имеется муфта проскальзывания, ограничивающая момент, передаваемый редуктором при повороте картушки до упора.
В указателе предусмотрена возможность регулировки положения нулевой линии шкалы тангажа (картушки) в диапазоне ±12° за счет поворота статора сельсина-приемника СПυ с помощью кремальеры центровки 16.
Центровка картушки производится по индексу, расположенному на лицевой части указателя.
Следящая система крена состоит из сельсина-датчика крена СДυ в гиродатчике, сельсина-приемника СПυ 7, усилителя и двигателя-генератора 8 с редуктором. Работа системы аналогична работе следящей системы тангажа.
Редуктор следящей системы крена несколько отличается от редуктора следящей системы тангажа. В этом редукторе с трибкой двигателя-генератора связаны две шестерни, с которых движение передается на ротор сельсина-приемника крена и силуэт самолетика через конические шестерни 14 и 15.
Передаточные отношения от двигателя-генератора крена к ротору сельсина-приемника крена и к силуэту самолетика одинаковы и равны 100.
Выше было указано, что во время выполнения самолетом фигур сложного пилотажа с углами тангажа более ±90° следящая рама гиродатчика принимает перевернутое положение относительно гироузла. При этом нулевое положение роторов сельсинов-датчиков тангажа и крена относительно статоров изменяется на 180°. Если в этот момент не осуществить коммутацию сигналов сельсина-датчика, показания углов крена будут с ошибкой 180°.

Коммутация производится с помощью коммутатора К2 и реле Р2, РЗ, Р7. При повороте следящей рамы относительно внешней рамы гироскопа на угол ±90° щетка коммутатора перемещается на токопроводящую ламель диска и замыкается цепь питания реле Р2, РЗ, Р7. Реле срабатывают. Р2 своими контактами переключает концы роторной обмотки сельсина-датчика крена. При этом магнитный поток, создаваемый обмоткой ротора, изменит свое направление на 180°. Следовательно, фаза напряжения, снимаемого с ротора сельсина-приемника крена, изменится на 180° и силуэт самолетика перевернется на 180° («вверх колесами»). Прибор покажет истинные углы крена самолета. При выполнении фигур сложного пилотажа (например, петли Нестерова) самолет будет лететь по траектории, указанной на рис. . При любом положении самолета прибор должен показывать истинное положение земли и неба. На участке I шкала должна отрабатываться от точки О к точке А. При дальнейшем увеличении угла тангажа на участке II шкала должна отрабатываться от точки А к точке О. Для этого необходимо изменить направление вращения двигателя-генератора канала тангажа, т. е. изменить одну фазу выходного напряжения усилителя. Изменение фазы выходного напряжения осуществляется с помощью двойной коммутации. Реле Р3 своими контактами переключает две статорные обмотки сельсина-датчика тангажа, а реле Р7 своими контактами меняет местами концы роторной обмотки сельсина-приемника тангажа. При этом фаза выходного напряжения усилителя следящей системы тангажа меняется на 180° и картушка начинает отрабатывать в противоположную сторону.
Отработка картушки прибора на участке III будет происходить от точки О к точке Б, а на участке IV—от точки Б к точке О. Работа системы коммутации происходит аналогично.