

Роторные вибрационные гироскопы роторные вибрационные гироскопы
К роторным вибрационным гироскопам (РВГ), нашедшим в последние годы широкое применение в гироскопических системах ориентации, относят измерители абсолютной скорости основания, в которых гироскопический момент, обусловленный переносным вращением основания, вызывает угловые колебания ротора — носителя кинетического момента. Эти колебания и содержат информацию об измеряемой угловой скорости.
Наиболее распространены два типа роторных вибрационных гироскопов— с двумя и тремя степенями свободы. Рассмотрим особенности работы РВГ с двумя степенями свободы.
Кинематическая схема двухстепенного РВГ с вращающимся подвесом представлена на рис. 2,3.

Рис.
2.3. Схема двухстепенного РВГ с вращающимся
подвесом:
1
— основание; 2
—
приводной двигатель; 3.—
вал
двигателя; 4
—
торсионы; 5 — ротор; 6
—
блок
выделения x
y
На основами 1
установлен приводной двигатель 2, на
валу 3 которого с помощью торсионов 4
укреплен ротор 5. Торсионы 4 имеют конечную
жесткость нa
кручение (вокруг оси Т) и существенно
большую жесткость на изгиб. Практически
жесткость можно принять равной
бесконечности. Ротор имеет две степени
свободы относительно основания — он
вращается вместе с валом приводного
двигателя с угловой скоростью
и может поворачиваться относительно
вала вокруг оси торсионов Т с угловой
скоростью
![]() .
Сущность измерения угловой скорости
основания этим устройством можно
пояснить следующим образом. При вращении
основания с абсолютной угловой скоростью,
вектор которой лежит в плоскости
Оху,
перпендикулярной оси вала, возникает
гироскопический момент Мгир;
его проекция на ось торсионов Т и
поворачивает ротор вокруг этой оси со
скоростью
.
Сущность измерения угловой скорости
основания этим устройством можно
пояснить следующим образом. При вращении
основания с абсолютной угловой скоростью,
вектор которой лежит в плоскости
Оху,
перпендикулярной оси вала, возникает
гироскопический момент Мгир;
его проекция на ось торсионов Т и
поворачивает ротор вокруг этой оси со
скоростью
![]() .
Поскольку ротор вращается с собственной
угловой скоростью,
проекция Мгир
на ось торсионов изменяется по
гармоническому закону с частотой и,
ротор колеблется вокруг оси торсионов
так же с частотой .
Амплитуда этих колебаний зависит
от величины измеряемой угловой скорости
,
а фаза зависит от соотношения x,y
— проекций
на оси основания Ох, Оу. С датчика угла
поворота ротора вокруг оси торсионов
(на рис. 2.3 не показан) полезный сигнал
поступает на вход устройства 6, включающего
множительные звенья и фильтры Ф1
,Ф2.
На выходе этого устройства — сигналы,
пропорциональные абсолютным угловым
скоростям вращения основания вокруг
осей Ох и Оу. Таким образом, двухстепенной
РВГ является одноканальным двумерным
измерителем угловой скорости.
.
Поскольку ротор вращается с собственной
угловой скоростью,
проекция Мгир
на ось торсионов изменяется по
гармоническому закону с частотой и,
ротор колеблется вокруг оси торсионов
так же с частотой .
Амплитуда этих колебаний зависит
от величины измеряемой угловой скорости
,
а фаза зависит от соотношения x,y
— проекций
на оси основания Ох, Оу. С датчика угла
поворота ротора вокруг оси торсионов
(на рис. 2.3 не показан) полезный сигнал
поступает на вход устройства 6, включающего
множительные звенья и фильтры Ф1
,Ф2.
На выходе этого устройства — сигналы,
пропорциональные абсолютным угловым
скоростям вращения основания вокруг
осей Ох и Оу. Таким образом, двухстепенной
РВГ является одноканальным двумерным
измерителем угловой скорости.
В этом случае в качестве выходного сигнала могут быть использованы как постоянные составляющие углов и , так и амплитуды их гармонических составляющих. Разделение гармонического сигнала по или по на компоненты, пропорциональныеx y, может быть осуществлено с помощью фазочувствительного выпрямителя, в котором в качестве опорного сигнала используются гармонические колебания с удвоенной частотой собственного вращения ротора 2.
Таким образом, съем сигнала двухстепенного РВГ может быть принципиально осуществлен во вращающейся вместе с ротором и в не вращающейся связанной с корпусом системах координат на основе использования гармонических и постоянных составляющих выходного сигнала. Выбор способа съема неоднозначен и во многом определяется как возможностями его технической реализации, так и возможностью достижения при этом минимальных погрешностей. Следует, однако, иметь в виду, что съем на основе использования гармонических составляющих выходного сигнала с точки зрения простоты и точности измерения является предпочтительным.
Заметим, что роторный вибрационный гироскоп с двумя степенями свободы, обладающий симметричным ротором (Jx=Jу), получил название гироскопа Сейвета. Сравнительно небольшие габариты РВГ и достаточно малый дрейф позволяют использовать его как в качестве основного чувствительного элемента гироскопического стабилизатора с непосредственным включением в цепь стабилизации, так и в качестве корректора гироскопической платформы.
Кинематическая
схема трехстепенного РВГ с вращающимся
подвесом представлена на рис. 2.5. На
основании 1 установлен приводной
двигатель 2, на валу 3 которого с помощью
торсионов 6 укреплено
внутреннее кольцо (ВК) 5. При помощи
торсионов 7, перпендикулярных
торсионам 6, с кольцом 5 связан ротор 4.
Торсионы
6 и 7 имеют конечную жесткость на кручение
и практически бесконечную жесткость
на изгиб. Ротор имеет три степени свободы
относительно основания — он вращается
вместе с валом приводного
двигателя и ВК с угловой скоростью ,
может поворачиваться вместе с ВК
относительно вала вокруг оси торсионов
6 с угловой скоростью
![]() и относительно ВК вокруг оси торсионов
7 — с угловой скоростью
и относительно ВК вокруг оси торсионов
7 — с угловой скоростью![]()
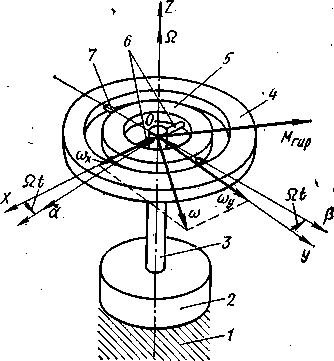
Рис. 2.5. Схема трехстепенного РВТ с вращающимся подвесом:
1 — основание; 2 — приводной ' двип тель; . 3 — вал двигателя; 4 — роте: 5 — внутреннее кольцо; 6 — торсиона внутреннего кольца; 7 — торсионы ротора
Углы поворота ротора вокруг осей торсионов (осей подвижной системы координат) или осей, связанных с корпусом, содержат информацию о компонентах x y, угловой скорости . Обработка информации осуществляется аналогично тому, как это делается в случае двухстепенного РВГ. Не останавливаясь на вопросах теории трехстепенного РВГ, отметим, что в этом приборе также реализуются условия резонансной динамической настройки, обеспечивающей высокую чувствительность к измеренным угловым скоростям. Погрешности трехстепенного РВГ в значительной мере аналогичны погрешностям двухстепенного РВГ. К числу основных погрешностей следует отнести методические погрешности, обусловленные угловыми колебаниями (вибрацией) основания с частотой 2 вокруг осей Ох и Оу, инструментальные погрешности вследствие наличия у ВК и ротора динамической и главным образом статической несбалансированности, инструментальные погрешности, появляющиеся при нарушении условия динамической настройки.
Трехстепенный РВГ используется в качестве основного чувствительного элемента на гироскопической платформе с непосредственным включением его в цепь стабилизации.
Второе объяснение раб гирофлекса