

pds
.pdfв) Преобладания Преобладания – что значит что наминал батареи + и – не одинаковы
I0
Iном
-I0
Θ
Результаты статистики испытания канала постоянного тока показали, что краевые искажения подчиняться нормальному закону:
|
|
|
1 |
|
|
|
− (δ − |
a)2 |
|
f (δ ) = |
|
|
|
e |
2 σ |
2 |
|
||
|
|
|
|
|
|
||||
σ |
|
2π |
|
|
|||||
|
|
|
|
|
|
|
|
||
δ |
- случайная величина |
|
|
||||||
a - математическое ожидание |
|||||||||
σ |
- среднеквадратическое отклонение |
||||||||
Нормальный логарифмический закон:
t
t
|
1 |
|
|
|
− (lnτ óð − m)2 |
f (δ ) = |
|
|
e |
2 σ 2 |
|
σ |
|
|
|
||
2π |
|
τ óð - случайная величина m - среднее значение
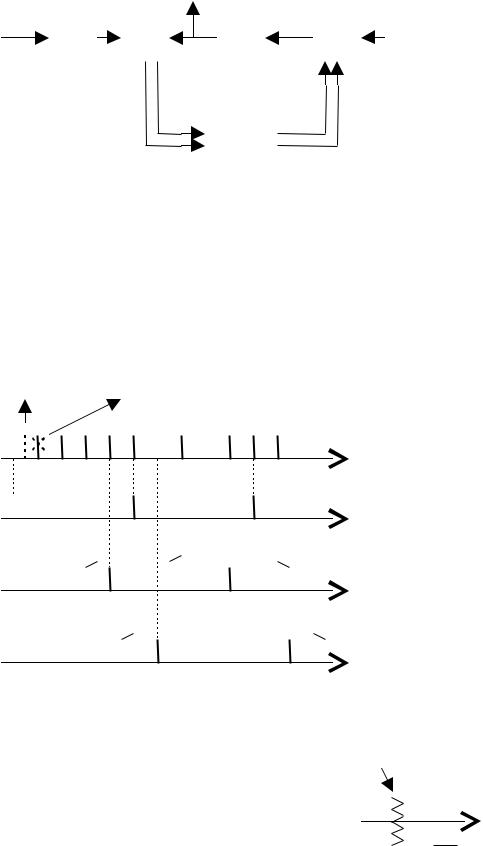
Методы регистрации дискретных сигналов.
От канала постоянного тока к дискретному каналу.
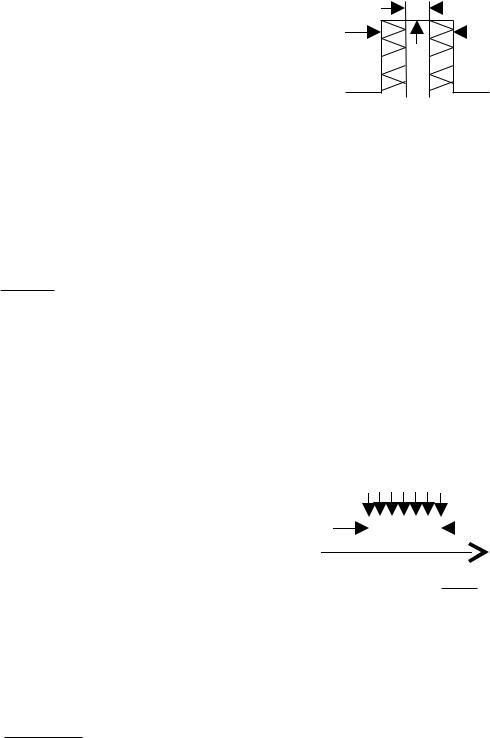
1.Метод стробирования (метод укороченного контакта, метод избирательного импульса).
Регистрируем только в момент регистрации tрег Для краевых искажений метод хороший т.е. краевые искажения мало влияют на регистрацию дискретного сигнала. Но для дробления плохо если дробления попадут на tрег то импульс будит распознан не правильно.
tрег
t0
 t
t
Исправляющая способность дискретного приемника – максимальная допустимая величина искажений, при которых импульс регистрируется правильно.
μ = δäî ï óñò èì î å
при краевых искажениях
μñò ðî á = t02− ttðåã 100% ≈ 50%
0
(максимальное значение 49% для реального приемника)
при дроблениях
μñò ðî á = 0
2.Интегральный метод регистрации (лучше для дроблений).
Импульс стробируется во многих точках и |
|
|
|
|
решение принимается по большинству |
t0 |
|||
(число точек, в которых происходит |
|
|
|
|
стробирование, нечетное). Данный метод |
|
|
|
t |
лучше для дроблений, но хуже при |
|
|
|
|
|
|
|
|
|
краевых искажениях. |
|
|
|
|
|
|
|
|
|
Исправляющая способность дискретного приемника – максимальная допустимая величина искажений, при которых импульс регистрируется правильно.
При дроблениях и краевых искажениях
μèí ò åãð = 0,5t0 −t tðåã 100% ≈ 25%
2 0
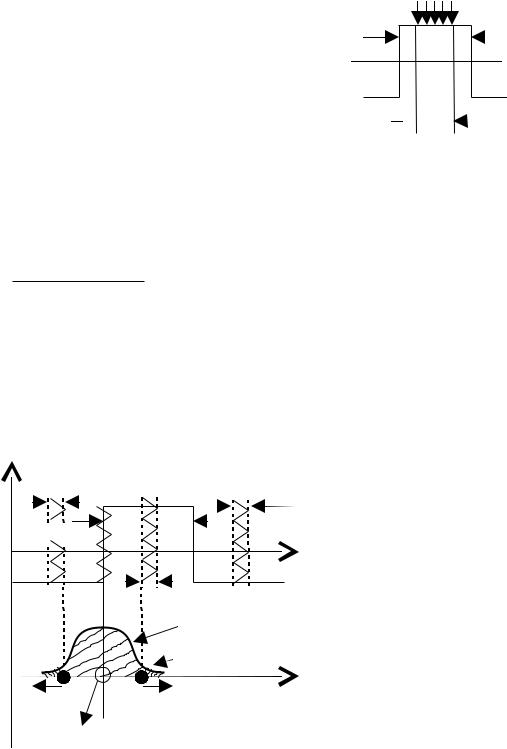
tрег – та часть длины импульса, которая необходимо для срабатывания исполнительного устройства.
3.Комбенированый метод регистрации.
Из импульса выделили среднюю часть размера ε и регистрируем по интегральному методу. Данный метод включает в себя достоинства метода стробирования и интегрального метода. Так же число точек, в которых происходит стробирование, нечетное.
t0
 t
t
ε
Исправляющая способность дискретного приемника – максимальная допустимая величина искажений, при которых импульс регистрируется правильно.
μêî ì á = t0 − ε + 0,5ε − tðåã 100% при ε = 0.5 t0 μêî ì á = 37,5% 2 t0
Связь δ и ρ (относительную величину случайных искажений с
вероятностью ошибок).
Будим считать, что действуют краевые искажения.
Uпер
tрег |
t |
рег |
|
|

 t0
t0
t
f (δ ) |
tрег |
|
|
|
|
|
|
Вероятность правильного приема q=1-p |
|
|
Вероятность ошибки |
−μa |
+μ |
δ |
|
Для оценки вероятности ошибки используем интеграл вероятности (функцию Лапласа).
|
1 |
|
|
β |
|
Z 2 |
|
||
Ô( p) = |
|
|
e 2 |
dZ |
|||||
|
|
|
|
|
|||||
2 2 |
π |
0 |
|||||||
|
|
|
|
||||||
p = 1− Ô |
μ + a |
|
|
|
μ − a |
||||
σ |
|
|
− Ô |
σ |
|||||
|
|
|
|
|
|
||||
Часто значением a можно пренебречь: p = 1− 2 Ô σμ
a - математическое ожидание
σ - среднеквадратическое отклонение
Устройство синхронизации по элементам (УСП).
1.Назначение и классификация
Устройство синхронизации по алиментам |
|
|
|
|
|
предназначается для установления заданных |
|
|
|
|
|
вероятных соотношений между идеальными |
|
|
|
|
|
|
|
|
|
||
значащими моментами момента (вырабатываемые |
|
|
|
|
|
передатчиком) и значащими моментами приемника. |
|
|
|
t |
|
|
|
|
|
||
Требования к УПС |
|
|
|
|
|
|
|
|
|
||
∙ Минимальное время вхождения в синхронизм |
Значащие |
||||
(установление и удержание требуемых |
|||||
моменты |
|||||
временных соотношений между значащими |
|||||
|
|
|
|
||
моментами импульсов передатчика и приемника) |
|
|
|
|
|
∙Длительное время удержания синхронизма
∙Простота и надежность устройства поэлементной синхронизации
Классификация:
∙Синхронизация с помощью передачи специальных импульсов, которые указывают значащие моменты, следовательно нужен отдельный канал синхронизации.
∙Передача значащих моментов по рабочим импульсам(по тем которые передают информацию):
а) резонансное системы синхронизации
б) системы поэлементной синхронизации, работающие по принципу фазовой автоподстройки частоты (ФАПЧ).
Основные элементы устройства автоматического регулирования.
Дискретный |
|
|
|
канал |
Фазовый |
|
Объект |
|
дискриминатор |
|
регулирования |
|
|
|
|
Устройство
управления
Фазовый дискриминатор (ФД) – определяет величину и знак рассогласования. Устройство управления (УУ) – вырабатывает сигнал который управляет объектом регулирования.
Фазовый дискриминатор устройство, которое сравнивает фазы значащих моментов импульсов, поступает из передатчика с фазами значащих моментов импульсов приемнике и выдает сигнал, соответствующий в общем случае величине и знаку рассогласования.
Можно в качестве объекта регулирования выбирать задающий генератор(ЗГ).
1)с воздействием на задающий генератор
2)без воздействия на задающий генератор
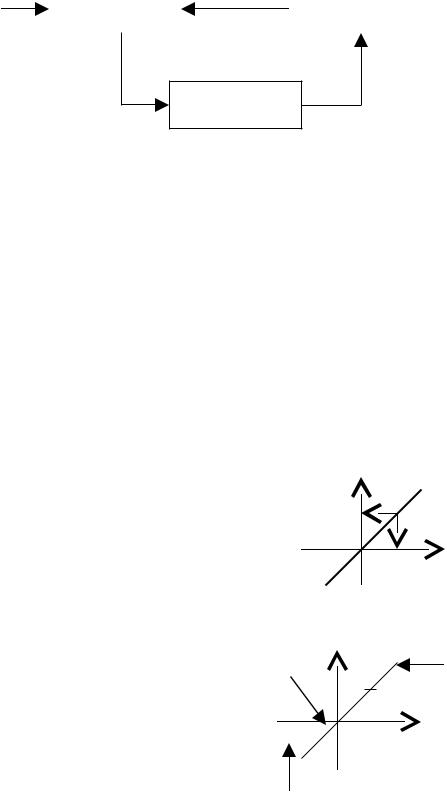
Принцип Работы УУ:
K
Θ – рассогласование фаз К – управляющее воздействие
Θ
I. Система с непрерывным управлением.
II. Системы с дискретным управлением.
Дискретизировали и интервалы рассогласования, и интервалы управления (по величине и по воздействию)
III. Системы с реальным управлением
С дискретным |
|
|
|
|
K |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
управлением |
|
|
|
|
|
|
|
|
|
|
С непрерывным |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
управлением |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Простейшая система с дискретным управлением (ориентация только на знак - реальное управление)

I, II и III без воздействия на задающий генератор.
2. Обоснование необходимости устройства синхронизации но элементам. Расчет вероятности удержания синхронизма.
fзг – задающий генератор с его частотой f = fçã − f1
Kçã = |
f - коэффициент нестабильности задающего генератора. |
|
fçã |
Нас интересует время, в течении которого фаза управляющих импульсов в приемнике разойдется с фазами управляющих импульсов в передатчике.
tn = |
1 |
= |
1 |
|
- разойдутся на 1 период (на 1 Гц) |
f |
Kçã |
|
|||
|
|
fçã |
|||
Нас интересует интервал 0,5t. Определим время, в течении которого фаза разодеться на значение t0:
tt |
|
= tn |
t0 = |
t0 |
= |
1 |
|
Kçã fçã T |
Kçã Re |
||||
|
0 |
T |
|
|
||
|
|
|
|
|
|
где
Re = t1 - скорость передачи единичного элемента
0
Kçã - коэффициент нестабильности задающего генератора
Уход на t0 – сохранение синхронизации. Интересует εt0 (часть от t0)
tε t |
|
= |
|
ε |
|
двойкой учитываем не стабильность двух ЗГ. |
|
|
|
|
|||
|
2 |
Kçã |
|
|||
|
0 |
|
Re |
|||
|
|
|
|
|
|
|
Задача: определить время в течении которого система связи выйдет из синхронизма, если скорость передачи единичного элемента Re=64 кбит/с, коэффициент нестабильности задающего генератора Кзг=10-6 Выйдет из синхронизма: ε =0,5
t |
0,5t0 |
= |
0,5 |
= |
250 |
≈ 4ñ |
|
2 10− 6 64000 |
64 |
||||||
|
|
|
|
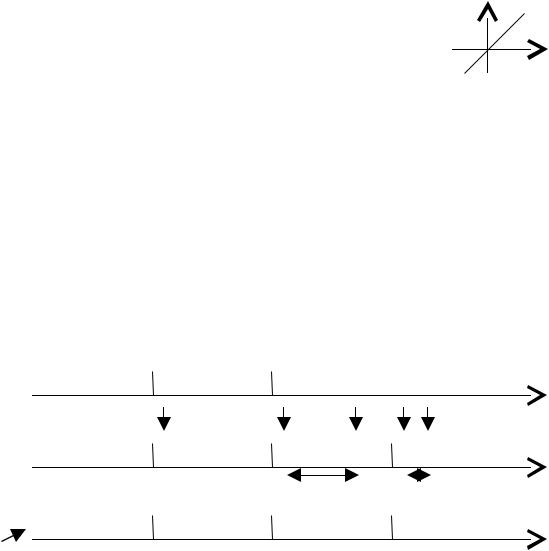
3.Схема ФАНЧ с дискретным управлением.
Из дискретного |
|
|
|
|
fуи |
|
|
|
|
|
|
|
fзг |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
канала |
|
Вх |
|
|
ФД |
|
|
ДЧ |
|
|
|
УУ |
|
|
ЗГ |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отста |
|
добавление |
|
вычитание |
||||||
|
|
|
|
|
вание |
|
|
|
|
|
|
||||
|
опережение |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Уср У |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вх – входное устройство ФД – фазовый детектор ДЧ – делитель частоты
УУ – управляющее устройство УсрУ – усредняющее устройство (усредняет значение результата сравнения за какой-то промежуток времени)
fуи – частота управляющих импульсов fзг – частота задающего генератора
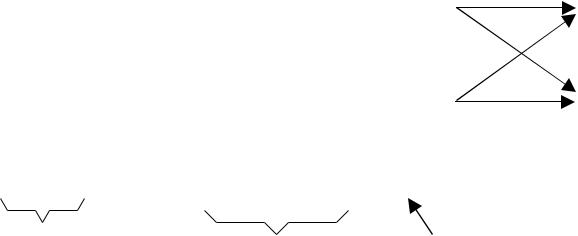
Принцип работы:
Добавим один |
Вычтем один |
|
|
|
||||||
импульс |
|
|
|
|||||||
импульс |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
fзг |
|
|
|
|
|
|
|
|
t Возьмем |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
каждый |
fуи |
|
|
|
|
|
|
|
|
|
пятый |
|
|
|
|
|
|
|
|
t |
импульс |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
Добавление |
|
Получили опережение |
|
|
||||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
импульса |
|
|
Получили отставание |
|
t |
|
||||
|
|
|
|
|||||||
Вычитание |
|
|
|
|
||||||
|
|
|
||||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
импульса |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
4.Основные характеристики системы ФАПЧ. |
|||||||||
1) Коррекционный эффект – относительное смещение фазы управляющих |
||||
импульсов при приеме одной границы импульса |
Kэ |
|||
|
||||
Положение граници определяется коррекционным |
|
|
|
|
эффектом. |
|
|
|
t |
|
|
|
||
|
|
|
|
|
2) Шаг коррекционный – относительное смещение фазы управляющих |
||
импульсов при одном воздействии (при добавлении |
(φk) |
|
или вычитании одного импульса). |
||
|
||
3)Время вхождения в синхронизм – минимальное время, необходимое для вхождения в синхронизм после иго потери.
4)Точность коррекции (статическая погрешность синхронизации) определяется нестабильностью задающего генератора.
Модели последовательностей ошибок в дискретном канале.
Ошибка – результат непрерывного решения регистрирующего устройства о значении принятого единичного элемента.
1.Классификация ошибок
|
|
|
|
К1 |
|
|
|
|
К2 |
|
|
|
|
К3 |
|
|
|
|
|
|
|
К4 |
|
|
|
|
|
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
1 |
|
|
|||
Пер |
|
|
|
t |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
|
|
||||
Пр |
|
|
t |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
|
||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||
Последовательность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|||||
ошибок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число ошибок в кодовой комбинации – кратность ошибок
1)P(i,n) – вероятность появления i ошибки в кодовой комбинации длины n
2)Возможные переходы:
1→ 0
0 →1
Если P(0 →1) = P(1→ 0) ,то такой канал симметричный. Если P(0 →1) P(1→ 0) ,то такой канал несимметричный.
3)Ошибки бывают
∙разнесенные
∙смежные
4)Пачка ошибок в кодовой комбинации – интервал от первой до последней ошибки
5)Отсутствие ошибок обозначим 0. А 1 на месте ошибок.
Двоичная последовательность, у которой на местах ошибок стоят 1, а на местах правильно принятых элементов 0, называется последовательностью
ошибок.
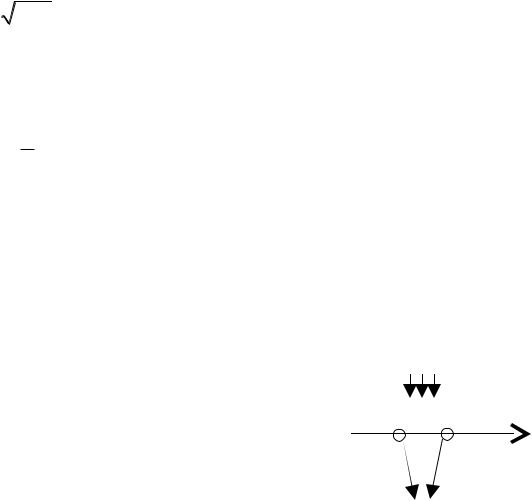
Характеристика моделей ошибок. 1.Модель канала с независимыми ошибками (схема Бернулли)
Все ошибки появляются не зависимо друг от друга и характеризуются вероятностью ошибок p.
Нас интересует P(i,n) − ?
P(− i,n) ?
P(i,n) =Cn i pi (1− p)n− i
n
P(0,n) = (1− p)n =1−
i= 1
n
P(=1,−n) 1 P=(0,n)
i= 1
|
|
0 |
1-p |
0 |
|
|
|
||
|
|
|
p |
|
|
|
|
p |
|
Cn i pi (1− p)n− i |
1 |
1-p |
1 |
|
|
|
|||
C−i |
pi (1 ≈p)n− i |
np |
|
|
n |
|
|
|
|
Вероятность |
Вероятность |
|
|
появления |
Ограничимся |
||
искажения |
|||
хотя бы одной |
первым слагаемым |
||
кодовой |
|||
ошибки |
из ряда |
||
комбинации |
|||
|
|
Плохое качество 10-1, |
10-2 |
– вероятность ошибки |
Средние качество 10-3, |
|
– вероятность ошибки |
Хорошее качество 10-3÷ 10-5 – вероятность ошибки
n |
j |
j |
|
|
n− j |
|
P(=1,−n) 1 |
(1 |
p) |
||||
Cn−p |
|
|||||
j= |
1 |
|
|
|
|
|
На практике нет каналов с независимыми ошибками.
Результаты статистических исследований дискретного канал:
∙во всех исследованных каналах все ошибки зависимы
∙ошибки, как правило, появляются пачками (группируются в пакеты, пачки)
∙каналы, как правило, характеризуются ассиметрией ошибочных переходов(вероятности перехода 1→ 0 и 0 →1 разные)
Характеризовать дискретный канал одним параметром p невозможно, следовательно, нужны дополнительные параметры, которые отражают зависимость ошибок.
2.Модель Котова.
Предположим, что ошибки в каннеле независимы, го сам канал имеет несколько состояний во время сеанса связи, следовательно, pi , i = 1,...,
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
|
0 |
0 |
0 |
… |
|
||||||||||||
|
|
I |
|
|
II |
|
|
|
|
III |
|
|
При Δ=2,3 можно получить результат, совпадающий с результатом экспериментальных опытов.
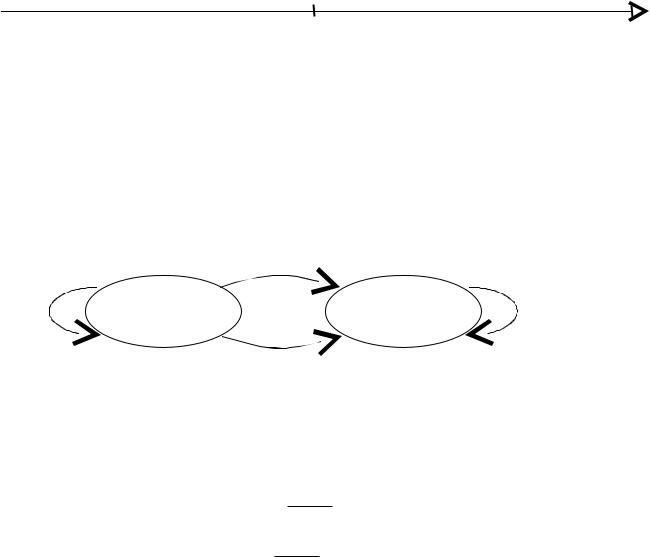
3. Модели на основе цепи Маркова (модель Гилберта)
Цепи Маркова характеризуется вероятностью состояния и вероятностью перехода из состояния в состояние.
Модель Гилберта.
1-ρ
ρ |
Хорошее |
Плохое |
Q |
|
состояние G |
состояние B |
|
|
1-Q |
С вероятностью h могут |
|
|
|
быть ошибки в состоянии B |
|
ρ – вероятность нахождения в состоянии G 1-ρ – вероятность перехода в B
Q – остаемся в В
1-Q – вероятность возвращения в хорошее состояние G
ρ
Вероятность хорошего состояния ρ + Q
Q
Вероятность плохого состояния ρ + Q
Задается матрица условных состояний перехода:
Ï= PGG PGB PBG PBB
4.Двухпараметрическая модель дискретного канала
Три названия модели :