

Elektro / Lek21_08
.pdfпредставляет собой электромагнитную мощность, передаваемую с помощью магнитного поля из статора в ротор. На схеме замещения (рис. 11.6 в) этой мощности соответствует мощ-
ность, пропорциональная активному сопротивлению |
R2 |
. Поэтому |
|
||||||||||||||||||
|
|
s |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
m I |
2 |
|
R2 |
|
|
m I |
2 |
|
R2 |
. |
|
(11.30) |
|||||||
|
2 |
|
|
|
|
|
|
2 |
|
|
|||||||||||
|
эм |
1 |
|
|
s |
|
|
|
|
|
1 |
|
s |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Другая часть этой мощности теряется в виде электрических потерь |
Pэ2 в активном |
||||||||||||||||||||
сопротивлении R 2 обмотки ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
m I 2R |
|
|
m I |
2R . |
|
|
(11.31) |
|||||||||||
|
э2 |
|
1 |
2 |
|
2 |
|
|
|
1 |
2 |
2 |
|
|
|
||||||
Остальная часть электромагнитной мощности преобразуется в механическую мощность Pмх |
|||||||||||||||||||||
ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pмх |
|
|
Pэм |
|
|
Pэ2 |
|
|
|
|
|
|
|
|
(11.32) |
|||||
или, с учетом уравнений (11.30) и (11.31) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
m I |
2R |
|
1 |
|
s |
|
|
m |
|
I 2R |
|
|
1 s |
. |
(11.33) |
|||||
2 |
|
|
|
|
|
|
|
2 |
2 |
|
|||||||||||
м х |
1 2 |
|
|
s |
|
|
|
|
2 |
|
|
s |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Полезная механическая мощность P2 |
на валу двигателя меньше механической мощности |
||||||||||||||||||||
Pм х на величину механических pм х и добавочных потерь pд |
|
|
|
|
|
|
|
||||||||||||||
|
P2 |
Pм х |
|
pм х |
pд . |
|
|
(11.34) |
|||||||||||||
Из уравнений (11.30)…(11.32) следует, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
pэ2 |
|
|
sPэм , |
|
|
|
|
|
(11.35) |
||||||
|
|
|
Pм х |
|
1 s Pэм . |
|
|
(11.36) |
|||||||||||||
Таким образом, активная мощность P1 представляет собой среднюю мощность пре-
образования в двигателе электрической энергии, потребляемой из сети, в механическую, тепловую и другие виды энергии. Процесс преобразований активной энергии в режиме двигателя изображен на рис. 11.8 а в виде энергетической диаграммы.
Сумма потерь в двигателе
p pэ1 pм 1 pэ2 pм х pд
вычитается из потребляемой мощности и определяет полезную мощность на валу
P2 P1  p .
p .

а) |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
Рис. 11.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
КПД двигателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
1 |
|
p |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
. |
|
|
|
(11.37) |
||||||
|
|
|
P1 |
P1 |
|
|
|
||||||||||
Непременным условием работы асинхронного двигателя является потребление реак- |
|||||||||||||||||
тивной мощности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
m1U1I1 sin |
|
1 . |
|
|
(11.38) |
||||||||||
Часть этой мощности расходуется на создание магнитных полей рассеяния |
|
||||||||||||||||
|
|
|
q |
m I 2X |
|
1 |
. |
|
|
|
(11.39) |
||||||
|
|
|
|
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|||
Оставшаяся мощность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
м |
m I 2X |
o |
|
|
|
(11.40) |
||||||||
|
|
|
|
|
1 |
|
o |
|
|
|
|
|
|||||
расходуется на создание основного магнитного потока, а мощность |
|
||||||||||||||||
q |
2 |
m I |
2 |
X |
2 |
|
m I 2 |
X |
2 |
(11.41) |
|||||||
|
1 |
1 |
|
|
|
|
2 |
|
2 |
|
|
||||||
расходуется на создание полей рассеяния в роторе.
Диаграмма реактивных мощностей изображена на рис. 11.8 б.
6.11. Электромагнитный момент
Электромагнитная мощность равна произведению электромагнитного вращающего
момента M и угловой скорости вращения |
1 |
магнитного потока |
|
|
Pэм M 1.
Механическая мощность на валу ротора равна произведению момента M на угловую скорость вращения ротора
Pмx M .
Как следует из рис. 11.8, разность электромагнитной и механической мощностей, затрачиваемая на электрические потери в активном сопротивлении ротора,
Pэм Pмx M 1 |
Pэ2 . |

|
Учитывая (11.31), получим |
|
|||||||
|
|
|
|
|
|
m I |
2 |
R s |
|
|
|
|
|
|
M |
1 |
2 |
2 |
, |
|
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
где s |
|
1 |
|
. |
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Из векторной диаграммы для ротора (рис. 11.9) |
||||||||
|
получаем |
|
|
|
|
|
|
|
|
Рис. 11.9 |
I2 R2 |
|
s E1 cos |
2 |
4,44kоб1 fw1Фcos 2 . |
||||
|
Формула для вращающего момента приобретает |
||||||||
вид |
|
|
|
|
|
|
|
|
|
|
M |
|
CмФI2 cos |
2 , |
|
|
(11.42) |
||
где Cм 4,44kоб1 fw1Ф – постоянный коэффициент.
Из (11.42) следует, что вращающий момент пропорционален произведению магнитного потока и активной составляющей тока ротора. Для определения момента через параметры
двигателя выразим ток I2 |
из схемы рис. 11.6 в без учета тока холостого хода |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
I 2 |
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
X 1 |
X 2 |
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и cos |
2 через параметры ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
cos |
2 |
|
|
|
|
|
|
|
|
|
|
s |
|
|
. |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Подставив последнее соотношение в (11.42) с учетом |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Ф = |
|
|
|
|
E1 |
|
|
|
|
|
|
, |
|
|
Cм |
3w2 p |
, |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
4,44kоб1 fw1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||
где w2 |
– число витков ротора на одну фазу статора (число фаз m = 3); р – число пар полюсов; |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
4,44 |
|
2 ; f |
|
; R |
|
R |
|
; X |
|
|
|
|
|
|
X |
|
|
, получаем |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 w |
|
||||||||||||||||||||||||||||
|
2 |
2 |
2 |
|
|
|
w |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
mpU12 R2 |
|
|
|
|
|
|
|
|
. |
(11.43) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
1s |
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
|
X 2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Согласно (11.43) электромагнитный момент при любом скольжении пропорционален квадрату напряжения фазы статора и тем меньше, чем больше R1 и индуктивное сопротив-
ление машины X к .

|
Графическая зависимость M f s показана на рис. |
||
|
11.10. |
|
|
|
Характерными точками для режима двигателя явля- |
||
|
ются: |
|
|
|
режим холостого хода: s = 0, M = 0; |
||
|
номинальный режим: sн =0,02…0,06, M M н ; |
||
|
режим максимального |
(критического) момента: |
|
|
sк 0,06 0,15, M Mк |
1,7 3 Mн ; |
|
|
режим пуска: s = 1,0, |
Mп |
11, 18, Mн . |
|
Максимум вращающего момента разделяет кривую на |
||
Рис. 11.10 |
устойчивую часть от s = 0 до sк |
и неустойчивую – от sк до |
|
|
s = 1. Увеличение тормозного момента выше максимального |
||
ведет к остановке двигателя.
Максимальный момент и критическое скольжение можно выразить через параметры
машины, приравняв к нулю первую производную |
dM |
0 по (11.43) |
|
ds |
|||
|
|
Mк |
|
mpU12 |
|
|||
|
|
|
|
, |
(11.44) |
|
|
|
|
|
|||
|
2 1 |
X к |
|
|||
sк |
|
R2 |
|
. |
(11.45) |
|
|
|
|
||||
|
X1 |
X 2 |
|
|||
В этих соотношениях знак плюс относится к двигательному, знак минус – к генераторному режиму работы. Напомним, что формулы получены без учета активного сопротивления обмотки статора.
Путем преобразования уравнения (11.43) с учетом (11.44) и (11.45) получим формулу момента в относительных единицах
M |
|
|
2M к |
|
||||
|
|
|
|
|
. |
(11.46) |
||
|
s |
|
|
s |
||||
|
|
к |
|
|
|
|
|
|
s sк
6.12. Механическая характеристика
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на ва-
лу n f M 2 |
. Так как при нагрузке момент холостого хо- |
да мал, то M 2 |
M и механическая характеристика пред- |
ставляется зависимостью n  f M . Если учесть взаимо-
f M . Если учесть взаимо-
связь |
s |
n1 |
n |
, то механическую характеристику можно |
n1 |
|
|||
|
|
|
|
получить из (11.43) или (11.46), представив ее графическую зависимость в координатах n и M (рис. 11.11).
Рис. 11.11 |
Пример 11.1. Трехфазный асинхронный двигатель с |
|
короткозамкнутым ротором питается от сети с напряжени- |

ем U л |
= 380 В при f = 50 Гц. Параметры двигателя: Pн = 14 кВт, nн = 960 об/мин, cos н = |
0,85, |
н = 0,88, кратность максимального момента kм = 1,8. |
Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику.
Решение. Номинальная мощность, потребляемая из сети
|
|
P1н |
Pн |
|
14 |
|
|
16 кВт. |
|||||||
|
|
н |
0,88 |
||||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Номинальный ток, потребляемый из сети |
|
|
|
|
|
||||||||||
|
|
|
P |
|
|
|
|
|
|
|
16 103 |
|
|||
I1н |
|
|
1н |
|
|
|
|
|
|
|
|
|
|
|
28 А. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3U1н cos н |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
3380 0,85 |
||||||||||
Число пар полюсов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
60 f |
60 50 |
3, |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
n1 |
1000 |
|
||||||||||
|
|
|
|
|
|
||||||||||
где n1 = 1000 – синхронная частота вращения, ближайшая к номинальной частоте nн = 960
об/мин.
Номинальное скольжение
sн |
n1 |
|
|
nн |
|
1000 960 |
0,04 . |
||||||||
|
|
n1 |
|
|
1000 |
|
|
||||||||
|
|
|
|
|
|
|
|||||||||
Номинальный момент на валу двигателя |
|
||||||||||||||
Mн |
Pн |
|
|
|
Pн |
|
|
14000 |
|
|
139,3 Н·м. |
||||
|
|
|
|
nн |
|
960 |
|
||||||||
|
|
н |
|
|
|
|
|||||||||
|
|
|
|
|
30 |
|
30 |
|
|
|
|||||
Критический момент |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
M к |
|
|
|
kмM н |
1,8 139,3 250,7 Н·м. |
|
|
|
||||||||||||||||
|
|
Критическое скольжение |
находим по |
(11.46), |
|
|
подставив M |
M н , s sн и |
||||||||||||||||||||
|
M к |
kм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sк kм sн |
sн2 |
sн kм |
|
|
|
kм2 |
|
|
|
|
|
|
1,82 |
|
|
|
||||||||||
|
|
|
kм sн |
|
|
|
1 |
0,04 1,8 |
1 |
0,132 . |
||||||||||||||||||
|
|
Для построения механической характеристики с помощью n |
n1 1 |
s |
определим ха- |
|||||||||||||||||||||||
рактерные точки: точка холостого хода s |
= 0, n = 1000 об/мин, |
M = 0, точка номинального |
||||||||||||||||||||||||||
режима sн = 0,04, |
nн = 960 об/мин, M н = 139,3 Н·м и точка критического режима sк = 0,132, |
|||||||||||||||||||||||||||
|
nк = 868 об/мин, M к =250,7 Н·м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Для точки пускового режима sп = 1, n = 0 из (11.46) находим |
|
|
|
|||||||||||||||||||||||
|
|
|
|
M п |
|
2 |
M к |
|
|
2 250,7 |
|
|
65 Н·м. |
|
|
|
||||||||||||
|
|
|
|
|
|
sк |
|
sп |
|
|
0,132 |
|
|
1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
sп |
|
sк |
1 |
|
0,132 |
|
|
|
|
|
|
|
|||||||||
По полученным данным строят механическую характеристику. Для более точного построения следует увеличить число расчетных точек и для заданных скольжений по (11.46) определить моменты, а по (11.4) – частоту вращения.

6.13. Пуск и регулирование скорости асинхронного двигателя
6.13.1. Способы пуска
При пуске ротор разгоняется от частоты вращения n = 0 до некоторой частоты n . Пуск возможен только тогда, когда вращающий момент двигателя больше момента сопротивления. Ниже рассмотрены основные способы пуска.
Прямой пуск осуществляется включением обмотки статора на напряжение сети. В первый момент скольжения s = 1, пусковой ток максимален
I1п |
|
U1 |
|
|
. |
(11.47) |
|
|
|
|
|||
2 |
2 |
|||||
|
|
R1 R2 |
X 1 X 2 |
|
||
Кратность пускового тока k I |
I п |
|
5 7 . |
|
|
|
|||
I н |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Пусковой момент по (11.43) |
|
|
|
|
|
|
|
||
|
|
|
3pU 2 R |
|
|
|
|||
Mп |
|
|
|
1 |
2 |
|
11, 1,8 M н . |
(11.48) |
|
|
|
R2 |
2 |
|
2 |
||||
|
|
|
|
|
|
||||
|
|
R1 |
|
|
X1 X 2 |
|
|
||
1 |
s |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Анализ (11.48) показывает, что при прямом пуске возникают большой бросок тока и относительно небольшой пусковой момент. Это оказывает отрицательное влияние на возможность пуска самого электродвигателя и на устойчивость работы других электродвигателей из-за снижения напряжения.
Пуск переключением обмотки статора применяется для двигателей, работающих при соединении обмоток статора в треугольник. При пуске обмотка статора с помощью переключателя соединяется в звезду. В результате линейный пусковой ток уменьшается примерно в три раза, пусковой момент также уменьшается в три раза. Если пусковой момент достаточен для разгона электропривода, то такой пуск допустим. После пуска обмотку статора переключают на схему треугольника, и двигатель работает в нормальном режиме.
При автотрансформаторном пуске обмотка статора включается на пониженное напряжение с помощью автотрансформатора. Двигатель разгоняется при пусковом токе и мо-
менте в k 2 раз меньше по сравнению с прямым пуском, где k – коэффициент трансформации понижающего автотрансформатора. В конце разгона двигатель переключается на напряжение сети.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора чере5з контактные кольца и щетки. Сопротивление пускового резистора R p в фазе
выбирают таким, чтобы пусковой момент был максимальным. Так как sп = 1 и sп sк , то с по-
мощью (11.45) находим |
|
|
|
|
R2 |
R p |
1, |
|
X 1 |
X 2 |
|
|
|
||
откуда |
|
|
|
Rp X1 |
X 2 R2 . |
||
Пуск двигателя поясняется схемой на рис. 11.11. В момент пуска двигатель развивает максимальный момент и разгон происходит на участке a b механической характеристики
1.
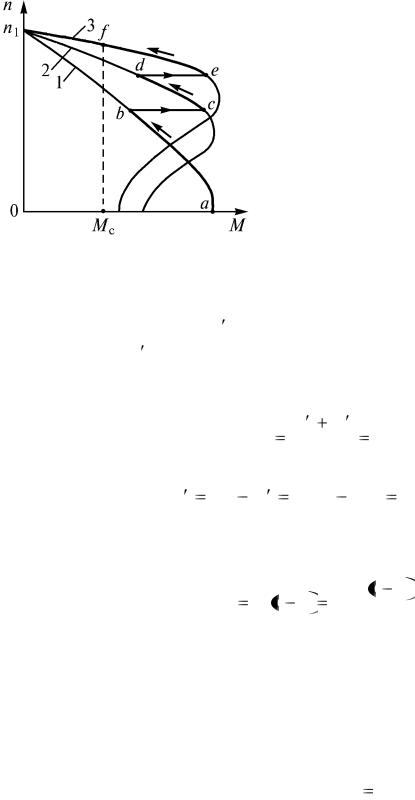
В момент, соответствующий точке b , выключается первая ступень резистора и момент скачком увеличивается до точки c механической характеристики 2; при разгоне до точки d выключается вторая ступень резистора и рабочая точка скачком переходит в точку e естественной механической характеристики 3. Установившийся режим наступает в точке f , соот-
ветствующей равенству моментов двигателя и нагрузки. Резистор закорачивается и щетки отводятся от колец.
Такой способ пуска применяют, как правило, для двигателей большой мощности при ограниченном пусковом токе и высоких требованиях к приводу. Не-
Рис. 11.12 достатками способа являются значительные потери электрической энергии в пусковом резисторе и слож-
ность устройства ротора.
Пример 11.2. Асинхронный двигатель с фазным ротором имеет номинальные параметры: Pн = 30 кВт, n = 1500 об/мин, R2 = 0,03 Ом и X к = 0,144 Ом. Определить сопротивление доба-
вочного резистора R p , который должен быть включен в фазу ротора для обеспечения пускового
момента, равного критическому.
Решение. Согласно (11.45) в режиме пуска
|
sк |
R2 |
R p |
1, |
|
|
|
X к |
|
|
|||
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
R p X к |
R2 |
0,144 0,03 |
0,114 Ом. |
|||
6.13.2. Регулирование частоты вращения двигателя |
||||||
Частота вращения асинхронного двигателя |
|
|
|
|||
n |
n1 1 |
s |
60 f 1 |
s |
||
|
|
|
. |
|||
|
p |
|
||||
|
|
|
|
|
|
|
Из этого равенства следует, что изменять частоту вращения можно изменением частоты f , числа пар полюсов p и скольжения s .
Регулирование изменением частоты тока статора (частотное регулирование) требу-
ет применения источников питания с регулируемой частотой. В качестве такого источника может быть использован синхронный генератор с переменной скоростью вращения или полупроводниковый преобразователь частоты. В этом случае частота вращения и частота вращения ротора изменяются пропорционально частоте сети. Частотное регулирование обычно
совмещают с изменением напряжения по закону |
U1 |
const . |
|
|
f |
||
|
|
|
|
К недостаткам частотного регулирования относятся громоздкость и высокая скорость питающей установки.
Для регулирования частоты вращения изменением числа пар полюсов применяют двигатели с короткозамкнутым ротором, у которых на статоре нескольких обмоток, размещенных в общих пазах и разное число пар полюсов или обмотки, которые позволяют получить различные числа пар полюсов путем изменения (переключения) их схемы соединения.

Такое регулирование возможно, так как у короткозамкнутого двигателя число полюсов ротора всегда равно числу полюсов вращающегося магнитного поля. Регулирование изменением числа пар полюсов является ступенчатым и применяется для уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Двигатели с изменяемым числом пар полюсов называют многоскоростными. Их выпускают на две, три или четыре скорости вращения, причем двухскоростные изготавливают с одной обмоткой на статоре с переключением числа пар полюсов в отношении p2 / p1 2 / 1, трехскоростные – с двумя обмотками на статоре, из которых одну выполня-
ют двухскоростной с p2 / p1 2 / 1 и четырехскоростные – с двумя обмотками, каждая из
которых выполняется с переключением числа полюсов в отношении 2/1.
Масса и стоимость многоскоростных двигателей больше, чем односкоростных двигателей. Но их часто применяют в установках дискретного изменения частоты вращения.
Регулирование скорости уменьшением напряжения на статоре. При уменьшении напряжения U1 момент двигателя
изменяется пропорционально U12 , что изменяет его механиче-
ские характеристики, следовательно, и скольжение. Как видно из рисунка 11.13, пределы регулирования скорости соответствуют изменению скольжения в интервале 0 s sк . Схемы автоматического регулирования позволяют расширить зону регулирования в области s sк и обеспечить при этом жесткие механические характеристики.
Рис. 11.13