

Elektro / Lek21_08
.pdfЛекция 6. АСИНХРОННЫЕ МАШИНЫ
1.Общие сведения
2.Устройство асинхронного двигателя
3.Получение вращающегося магнитного поля
4.Принцип действия асинхронной машины и режимы ее работы
5.Электродвижущие силы в обмотках статора и ротора
6.Ток ротора
7.Частота вращения магнитного потока ротора
8.Уравнения магнитодвижущих сил и ток статора асинхронного двигателя
9.Схема замещения и векторная диаграмма асинхронного двигателя
10.Энергетический баланс асинхронного двигателя
11.Электромагнитный момент
12.Механическая характеристика
13.Пуск и регулирование скорости асинхронного двигателя
6.1. Общие сведения
Асинхронная машина – это бесколлекторная машина переменного тока, у которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля.
Асинхронные двигатели являются самыми распространенными из всех двигателей. Их преимущества состоят в простоте устройства, большой надежности и сравнительно низкой стоимости.
Широко применяются трехфазные асинхронные двигатели, предложенные М.О. ДоливоДобровольским в 1888 г. Они выполняются мощностью от долей ватта до тысяч киловатт, с частотой вращения от 500 до 3000 об/мин и напряжением до 10 кВ. Однофазные асинхронные двигатели используют для привода бытовых приборов, электроинструмента, в схемах автоматики. Они питаются от однофазной цепи и имеют мощность, как правило, не выше 0,5 кВт.
Асинхронные машины могут работать в режиме генератора. Но как источники электрической энергии они почти не применяются, так как не имеют собственного источника возбуждения магнитного потока и по своим показателям уступают синхронным генераторам.
Асинхронные машины применяют в качестве регуляторов напряжения, фазорегуляторов, преобразователей частоты и др.
Недостатками асинхронных машин являются сложность и неэкономичность регулирования их эксплуатационных характеристик.
6.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов (рис. 11.1). Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса 1, сердечника 2 и обмотки 3. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала 4, магнитопровода 5, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых с обоих торцов ротора накоротко. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству. Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С1, С2, С3 и кон-

цы фаз С4, С5, С6. На рис. 11.2 показаны схемы расположения этих выводов (рис. 11.2 а) и способы соединения их между собой при соединении фазных обмоток звездой (рис. 11.2 б) и треугольником (рис. 11.2 в).
Если в паспорте двигателя указаны два напряжения, например, 380/220, то большему напряжению соответствует соединение звездой, более меньшему – треугольником. В обоих случаях напряжение на фазе двигателя равно 220 В.
Рис. 11.1
а) |
б) |
в) |
|
|
Рис. 11.2 |
6.3. Получение вращающегося магнитного поля
Основой действия асинхронного двигателя является вращающееся магнитное поле. Принцип получения вращающегося магнитного поля заключается в том, что если по системе проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле.
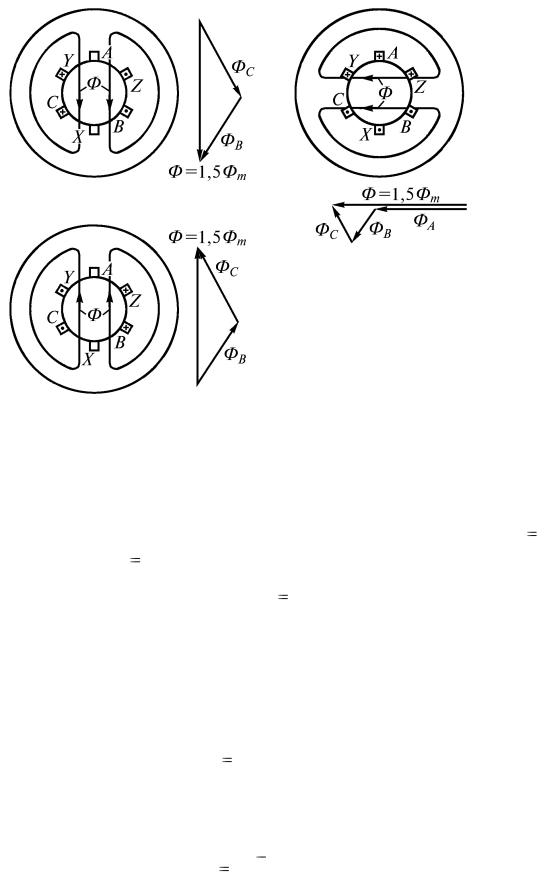
Рассмотрим получение вращающегося поля в трехфазном двигателе. На рис. 11.3 показаны три фазные обмотки A – X, B – Y, C – Z, каждая в виде одного витка. От источника питания к обмоткам подводится трехфазная система токов
i A Im sin t ; iB I m sin t 120 ; iC |
I m sin t 120 . (11.1) |
Положительные направления токов приняты от начала обмотки к концу, а соответствующие им пульсирующие магнитные потоки образуют трехфазную звезду ФA,ФB ,ФC .
Рассмотрим результирующий магнитный поток для нескольких моментов времени. В начальный момент времени при t = 0
i |
AO |
0; i |
3Im |
; |
i |
3Im |
. |
|
|
||||||
|
BO |
2 |
|
CO |
2 |
|
|
|
|
|
|
|
|

а) |
б) |
Рис. 11.3
Им соответствуют магнитные потоки
|
|
|
|
|
|
|
|
|
|
|
|
Ф 0 ; |
Ф |
|
|
3Фm |
; |
Ф |
|
3Фm |
, |
||
A |
|
B |
2 |
|
|
C |
2 |
|
|||
|
|
|
|
|
|
|
|
||||
где Фm – максимальное значение потока фазы.
Результирующий магнитный поток в 1,5 раза больше фазного и направлен по вертикали вниз (рис. 11.4 а).
В момент времени t1 T 4 токи в обмотках |
|
|
|
|
||||||||
|
i |
A |
I |
m |
; |
i |
B |
i |
|
Im |
. |
|
|
|
|
||||||||||
|
|
|
|
|
C |
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Этим токам соответствуют магнитные потоки |
|
|
|
|
||||||||
Ф |
A |
|
Ф |
; |
Ф |
B |
Ф |
|
Фm |
. |
||
|
|
|
||||||||||
|
|
m |
|
|
С |
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
На рис. 11.4 б показаны векторы результирующего магнитного потока и его составляющие. Направление потока отличается от предыдущего на 90°, а его значение не изменилось
Ф 1,5Фm .
В момент времени t2 |
T 2 , соответствующий t2 |
180 , токи в обмотках: |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
0; i |
|
|
3Im |
; i |
|
3Im |
. |
||
A |
B |
|
|
|
|||||||
|
|
2 |
C |
2 |
|
|
|||||
|
|
|
|
|
|
|
|
||||
Этим токам соответствуют магнитные потоки
ФA 0 .
На рис. 11.4 в показаны результирующий магнитный поток и его составляющие. По сравнению с начальным моментом времени результирующий магнитный поток изменил направление на 180°, а его значение осталось неизменным и равным
|
|
|
|
|
|
|
|
|
|
|
15, Ф . Ф |
|
|
3Фm |
; |
Ф |
|
3Фm |
. |
||
B |
|
|
|
|||||||
m |
2 |
|
C |
2 |
|
|
||||
|
|
|
|
|
|
|
||||
а)
б)
в) |
Рис. 11.4 |
|
Таким образом, трехфазная обмотка, питаемая сдвинутыми на 120° токами, создает вращающееся магнитное поле. Результирующий поток остается неизменным и равным 1,5 от максимального потока фазы. Направление этого потока всегда совпадает с направлением магнитного потока той фазы, ток в которой в данный момент максимален. Поэтому для изменения направления вращения необходимо поменять местами любые две фазы.
Рассмотренные примеры относятся к двухполюсному исполнению обмотки ( 2 p 2 )
при частоте вращения поля n1 60 f . В общем случае частота вращения поля |
|
||
n |
60 f |
, |
(11.2) |
|
|||
1 |
p |
|
|
|
|
||
где p – число пар полюсов машины; f – частота тока статора.
6.4. Принцип действия асинхронной машины и режимы ее работы
Трехфазная обмотка статора создает магнитное поле, вращающееся со скоростью
n |
60 f |
. |
|
||
1 |
p |
|
|
||
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Отношение
s |
n1 |
n |
(11.3) |
n1 |
|
||
|
|
|

или
s |
n1 |
n |
100 % |
(11.4) |
n1 |
|
|||
|
|
|
|
называется скольжением асинхронной машины.
В зависимости от соотношения n1 и n различают три
режима работы: в режиме двигателя; в режиме генератора; в режиме электромагнитного тормоза.
Работа в режиме двигателя. На рис. 11.5 показано маг-
нитное поле статора, вращающееся по часовой стрелке. При n n1 линии поля статора перемещаются относительно ротора
также по часовой стрелке со скоростью n1 n . Согласно пра-
вилу правой руки ЭДС в проводниках ротора под северным полюсом направлены к нам, в проводниках под южным полюсом – от нас. То же направление имеют и активные составляющие токов в проводниках. Электромагнитные силы взаимодействия магнитных полей статора и ротора создают вращающий момент в направлении вращения поля статора. Скорость n , с которой вращается двигатель, зависит от его нагрузки. При холостом ходе скорость n становится почти равной n1 , так как при n1 n = 0 ЭДС и токи в
роторе равны нулю и электромагнитное взаимодействие исчезает. Таким образом, асинхронная машина работает в режиме двигателя в пределах от n = 0 до n n1 , т.е. при скольжении
от s +1 до s 0. При этом электрическая энергия, подводимая к статору из сети, преобразовывается в механическую энергию на валу.
Работа в режиме генератора. Предположим, что подключенный к сети статор создает вращающееся магнитное поле, а ротор приводится во вращение в том же направлении со скоростью n n1 . В этом случае скольжение будет отрицательным, а ЭДС и токи ротора из-
меняют направление по сравнению с работой в режиме двигателя. Момент на валу становится тормозящим по отношению к вращающему моменту первичного двигателя. Асинхронная машина работает генератором. Механическая энергия, подведенная к валу, преобразовывается в электрическую энергию и отдается в сеть. Таким образом, асинхронная машина мо-
жет работать в режиме генератора параллельно с сетью в пределах от n n1 до n |
, т.е. |
|
при скольжении от s 0 до s |
. |
|
Работа в режиме электромагнитного тормоза. Допустим, что ротор приводится во вращение против направления вращения магнитного потока статора. В этом случае к асинхронной машине подводится энергия с двух сторон – электрическая из сети и механическая от первичного двигателя. Такой режим работы называется режимом электромагнитного тормоза. Он возникает при скольжении от s  1 до s
1 до s  . Примером практического применения режима электромагнитного тормоза является опускание груза в подъемнотранспортных устройствах.
. Примером практического применения режима электромагнитного тормоза является опускание груза в подъемнотранспортных устройствах.
6.5. Электродвижущие силы в обмотках статора и ротора
Вращающийся магнитный поток в воздушном зазоре пересекает проводники обмоток статора и ротора и индуктирует в них синусоидальные ЭДС. ЭДС одного витка
e |
dФ |
Em sin t , |
|
|
|||
dt |
|||
|
|
где Ф – максимальное значение вращающегося магнитного потока.
Обмотка статора имеет w1 витков, уложенных в пазах. В один и тот же момент времени мгновенные значения ЭДС, наведенные в витках, получаются сдвинутыми по фазе.

Суммарная ЭДС равна геометрической сумме ЭДС, которая меньше алгебраической суммы. Эта разность учитывается коэффициентом распределения. Кроме того, в электрических машинах переменного тока применяют укороченные шаги обмотки и профилирование пазов с целью получения синусоидального распределения потока. Эти меры также уменьшают ЭДС, что учитывается соответствующими коэффициентами укорочения и скоса пазов. Произведение всех трех коэффициентов называется обмоточным коэффициентом, числовое значение
которого kоб1 = 0,92…0,98. Амплитуда ЭДС фазной обмотки статора |
|
||||||||||
E1m |
kоб1 |
w1Ф, |
|
|
|||||||
а ее действующее значение с учетом |
2 f |
можно записать в виде |
|
||||||||
|
E1 |
4,44kоб1 fw1Ф . |
|
(11.5) |
|||||||
Сравнение (11.5) с (7.3) показывает, что ЭДС обмотки статора зависит от тех же па- |
|||||||||||
раметров, что и ЭДС первичной обмотки трансформатора, если принять kоб1 = 1. |
|
||||||||||
Частота этой ЭДС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
pn1 |
. |
|
|
(11.6) |
||
|
|
|
|
60 |
|
||||||
|
|
|
|
|
|
|
|
|
|
||
ЭДС, наведенная в обмотке ротора, имеет частоту |
|
|
|||||||||
f2 |
|
p n1 |
n |
|
|
pn1s |
|
fs . |
(11.7) |
||
|
|
60 |
|
|
60 |
|
|||||
|
|
|
|
|
|
|
|
||||
В режиме двигателя частота ЭДС ротора при пуске равна частоте напряжения сети, а в рабочем режиме составляет несколько герц. Так, при s = 0,04 частота ЭДС в роторе f2 =
50·0,04 = 2 Гц.
ЭДС обмотки вращающегося ротора
E2S 4,44kоб2 f2 w2Ф ,
где kоб2 – обмоточный коэффициент для обмотки ротора, w2 – число витков фазы обмотки
ротора.
В короткозамкнутой обмотке в пазу находится один проводник, который представля-
ет собой отдельную фазу. Поэтому w2 = 0,5, а kоб2 = 1. |
|
|
У двигателя с фазным ротором kоб2 |
kоб1. |
|
С учетом (11.7) ЭДС вращающегося ротора можно представить в виде |
|
|
E2S |
4,44kоб2 f sw2Ф , |
(11.8) |
ЭДС неподвижного ротора при s = 1 |
|
|
E2 |
4,44kоб2 f w2Ф . |
(11.9) |
Следовательно, ЭДС вращающегося ротора (11.8) можно выразить через ЭДС непод- |
||
вижного ротора |
|
|
|
E2S sE2 , |
(11.10) |
т.е. ЭДС обмотки ротора прямо пропорциональна скольжению или обратно пропорциональна частоте вращения ротора. Максимальное значение ЭДС ротора в режиме двигателя соответствует скольжению s = 1, т.е. при неподвижном роторе.
Из сравнения (11.5) и (11.9) следует, что асинхронная машина подобна трансформатору с коэффициентом трансформации по ЭДС
k |
E |
E1 |
|
kоб1w1 |
. |
(11.11) |
|
|
|||||
|
E2 |
|
kоб2 w2 |
|
||
|
|
|
|
|||
По аналогии с трансформатором введем понятие ЭДС заторможенного ротора, приведенной к статору
E2 kE E2 E1 . |
(11.12) |
Кроме рассмотренных ЭДС обмоток зультирующим (основным) магнитным потоком, рассеяния:
в обмотках статора
ES1
статора и ротора, обусловленных ре- в обмотках индуктируются ЭДС от потоков
4,44kоб1 f w1ФS1 , |
(11.13) |
в обмотках ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ES2 |
|
4,44kоб2 f s w2ФS2 . |
(11.14) |
|||||||||||
Составляющие напряжения сети, соответствующие ЭДС самоиндукции, представляют |
|||||||||||||||||
в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U x1 |
|
jX1 I 1 |
j LS1 I 1, |
(11.15) |
|||||||||||
где X 1 |
L S 1 – индуктивное сопротивление от потоков рассеяния одной фазы статорной |
||||||||||||||||
обмотки, и в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U x2S |
|
jX2S I 2 |
j LS 2s, |
(11.16) |
|||||||||||
где X 2S |
X 2 s |
sLS2 – индуктивное сопротивление от потоков рассеяния одной фазы |
|||||||||||||||
обмотки вращающегося ротора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6.6. Ток ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Под действием ЭДС ротора (11.10) в его обмотке протекает ток |
|
||||||||||||||||
|
|
I |
|
E2S |
|
|
|
|
E2 s |
|
|||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
. |
(11.17) |
|
|
|
Z2S |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
R22 |
X 22S |
|
|||||||
С учетом равенств E2S E2 s и |
X 2S |
|
|
sX 2 получаем |
|
||||||||||||
|
|
|
I 2 |
|
|
|
|
|
|
E2 |
|
|
. |
|
|
(11.18) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
R2 |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
|
||||
|
|
|
|
|
|
|
|
s |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ток по (11.18) равен току (11.17), но отличается тем, что имеет частоту, равную частоте неподвижного ротора, т.е. частоте напряжения сети. Угол сдвига по фазе между ЭДС и
током остается неизменным |
|
|
|
|
|
|
|
|
|
2 |
arctg |
X 2 |
|
arctg |
sX 2 |
arctg |
X 2S |
. |
|
|
|
|
|
||||||
|
|
R2 |
|
|
R |
|
R |
||
|
|
|
|
|
|
||||
|
|
|
|
2 |
2 |
|
|||
|
|
|
s |
||||||
|
|
|
|
|
|
|
|
|
|
6.7. Частота вращения магнитного потока ротора
Так как в короткозамкнутом роторе каждый стержень (в пазу проводника) образует отдельную фазу, а пазы ротора сдвинуты в пространстве, то сдвинутые по фазе токи в стержнях создают вращающееся магнитное поле. В любом случае частота вращения магнитного
потока ротора в пространстве равна сумме частоты вращения самого ротора |
n и частоты |
||||
вращения потока ротора относительно ротора n |
60 f 2 |
, т.е. |
60sf |
n n |
. Таким обра- |
|
|
||||
|
p |
|
p |
1 |
|
|
|
|
|
||
зом, магнитные потоки статора и ротора вращаются относительно статора с одинаковой частотой n1 и образуют один результирующий магнитный поток.
6.8. Уравнения магнитодвижущих сил и ток статора асинхронного двигателя

При холостом ходе асинхронного двигателя МДС ротора близка к нулю и вращающийся магнитный поток создается только МДС статора
F1 m1kоб1 I 0w1 ,
где I 0 – ток холостого хода двигателя.
При увеличении нагрузки на валу двигателя увеличивается ток ротора, а его МДС
F2 m2kоб2 I 2w2 .
Геометрическая сумма МДС статора и ротора всегда равна МДС статора при холо-
стом ходе |
|
|
|
|
|
|
|
|
|
|
|
|
m1kоб1 I1w1 m2kоб2 I 2w2 |
m1kоб1 I 0w1 . |
|
||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
I 1 |
|
I 2 |
|
I 0 |
(11.19) |
|
|
|
|
|
ki |
||||
|
|
|
|
|
|
|
|
||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 I 2 |
I 0 , |
(11.20) |
|||
|
где I 2 |
|
I 2 |
– приведенный ток ротора. |
|
(11.21) |
|||
|
|
k i |
|
||||||
|
|
|
|
|
|
|
|
|
|
Здесь ki |
m1kоб1w1 |
– коэффициент трансформации по току. |
|
||||||
m2 kоб2 w2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
Из (11.20) ток статора двигателя |
|
|
|
|
|
||||
|
|
|
|
|
I1 |
I 0 I 2 . |
(11.22) |
||
Уравнения токов (11.20) и (11.22) аналогичны соответствующим уравнение для токов трансформатора. Ток статора, как и ток первичной обмотки трансформатора, имеет составляющие тока холостого хода и ток ротора, обусловленный нагрузкой. Отличие заключается в том, что ток холостого хода асинхронного двигателя намного больше, чем в трансформаторе, и составляет 40…60 % от номинального значения. Это обусловлено двойным воздушным зазором в магнитной системе машины.
Составляющая тока ротора I 2 появляется тогда, когда к валу ротора приложен тормозной момент. При этом приведенный ток I2 отличается от реального не только за счет разного числа витков и обмоточных коэффициентов обмоток статора и ротора, но и числа
фаз |
обмоток ротора. Поэтому для приведения ротора необходимо, чтобы w2 w1 , |
|
m2 |
m1, |
kоб2 kоб1, что было учтено в (11.20). |
|
6.9. |
Схема замещения и векторная диаграмма асинхронного двигателя |
При анализе работы асинхронной машины используют схему замещения. Переход от схемы с электромагнитной связью к схеме с электрической связью показан на (рис. 11.6). На схеме замещения (рис. 11.6 а) электромагнитная связь осуществляется через основной магнитный поток Ф , который индуктирует в обмотке статора ЭДС E1, а в обмотке вращающе-
гося ротора – ЭДС E 2S , определяемые уравнениями (11.5) и (11.8). Схема замещения (рис. 11.6 б) соответствует неподвижному ротору, для которого индуктивное сопротивление равно X 2 , активное – R2  s . При этом ЭДС ротора E 2 определяется выражением (11.9), а
s . При этом ЭДС ротора E 2 определяется выражением (11.9), а
уравнение электрического равновесия для цепи ротора имеет вид

|
|
|
|
|
|
|
|
|
|
|
|
|
E 2 |
I 2 R2 |
|
j I |
|
X 2 . |
(11.23) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножив это равенство на коэффициент трансформации ЭДС K E |
(11.11) с учетом |
||||||||||||||||||||||
(11.12) и (11.21) получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
I |
2 R2 |
|
j |
I |
|
2 X 2 , |
(11.24) |
||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k”‡1 w1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
R2 |
K E ki R2 |
|
m1 |
|
|
|
R2 |
– приведенное активное сопротивление фазы ротора; |
|||||||||||||||
|
m2 |
|
k”‡2 w2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
m1 |
|
|
kоб1w1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
X 2 |
K E ki X 2 |
|
X 2 |
– приведенное индуктивное сопротивление фазы ро- |
||||||||||||||||||||
m2 |
kоб2 w2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
тора.
а)
б)
в)
Рис. 11.6
Уравнение (11.24) позволяет перейти к схеме замещения (рис. 11.6. в) с электрической связью между статором и ротором. В ветви намагничивания протекает ток I 0 , который со-
гласно (11.20) и схеме замещения (рис. 11.6 в) определяется по формуле
I 0 I1 I 2 .

Падения напряжения от этого тока на сопротивлениях R0 и X0 равны ЭДС:
E1 E 2 .
Уравнение электрического равновесия для цепи статора
U 1 E1 I 1R1 j I 1 X1 |
(11.25) |
аналогично уравнению (9.7) для первичной цепи трансформатора.
Схеме замещения (рис. 11.6 в) и уравнениям (11.24) и (11.25) соответствует векторная диаграмма (рис. 11.7). Из рис. 11.18 видно, что с увеличением момента нагрузки на валу и, следовательно, скольжения, возрастает ток ротора I 2 . Из векторной диаграммы
следует, что одновременно увеличивается ток статора I 1 и уменьшается фаза 1 . С увели-
чением тока I1 |
увеличиваются падения на- |
пряжения I 1R1 |
j I 1 X1 на статоре и когда |
падение напряжения становится соизмеримым с напряжением U1, угол 1 вновь воз-
растает.
В режиме холостого хода ток ротора I 2 0, угол сдвига 1 тока статора относи-
тельно напряжения сети U1 близок к  2 .
2 .
Рис. 11.7
6.10. Энергетический баланс асинхронного двигателя
Асинхронный двигатель потребляет из сети активную и реактивную мощность. Рассмотрим каждую из них.
Активная мощность
P |
m U I cos |
|
. |
(11.26) |
||
1 |
1 |
1 1 |
|
|
1 |
|
Часть этой мощности теряется в виде электрических потерь в активном сопротивле- |
||||||
нии обмотки |
|
|
|
|
|
|
|
P |
m I 2R |
, |
|
(11.27) |
|
|
э1 |
1 1 |
1 |
|
|
|
часть – в виде магнитных потерь Pм1 в магнитопроводе статора |
|
|||||
P |
m I 2R |
|
. |
(11.28) |
||
|
м1 |
1 0 |
0 |
|
|
|
Оставшаяся часть мощности |
|
|
|
|
|
|
P |
P |
P |
|
P |
(11.29) |
|
эм |
1 |
э1 |
|
|
м1 |
|