

9. Расчёт параметров отсечки
Напряжение управления Uy, подаваемое на СИФУ, ограничивается максимально возможным значением, которое по характеристике СИФУ соответствует минимальному углу управления. По характеристике рис.6 эта величина составляет 11В.
Для ограничения входного сигнала, который может неконтролируемо расти, в схеме привода необходимо предусмотреть стабилизатор напряжения управления. Одна из возможных схем стабилизации напряжения показана на рис.8.
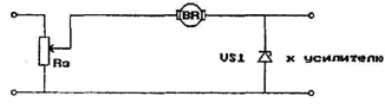
Рис. 8
Выходное напряжение схемы поддерживается на уровне пробивного напряжения стабилитрона VS1. Разница между входным и выходным напряжениями гасится на сопротивлении R3. Такое ограничение при действии токовой отсечки отключает связь по скорости и обеспечивает на выходе системы сигнал управления, значительно меньший уровня задающего напряжения.
Напряжение стабилизации стабилитрона (диода) VS1 выбирается из условия:
UВр/Ку<=UVSI=< Uуmax/Ку 4/0,45=8,89 = < UVSI =< 11/0,45=24,4 (30).
Выберем стабилитрон VS1 КС524Г от 18 - 28 В
Блок токоограничения (БТО) (рис.9) состоит из трёх трансформаторов тока, первичные обмотки которых включены последовательно в силовую цепь, а вторичные обмотки нагружены сопротивлениями Rl, R2, R3. Напряжение, пропорциональное току в силовой цепи, снимается с активных сопротивлений, выпрямляется диодами VD1-VD6, пульсации сглаживаются конденсатором С1. Часть выпрямленного напряжения снимается с потенциометра R4 и может быть подана на усилитель. Отсечка осуществляется стабилитроном VS2.
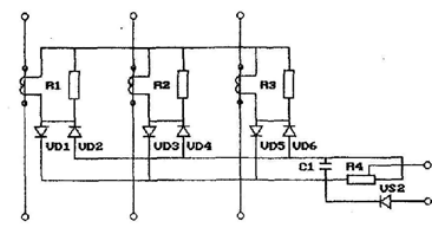
Рис. 10
При предельных моментах нагрузки, когда ток превышает установленную величину, на усилитель подаётся сигнал токовой отсечки, который резко уменьшает выходное напряжение преобразователя, и двигатель останавливается.
Ток нагрузки, при котором отсечка вступает в действие,
Iотс=Мп1Кд=20,87∙1,666=34,78А (31)
Ток короткого замыкания
Iкз= Мп2∙Кд=23,80∙1,666=39,65А= Iст (32)
По регулировочным характеристикам СИФУ и преобразователя определяется напряжение на входе СИФУ, обеспечивающее при неподвижном якоре ток стопорения IСТ, ЭДС преобразователя при этом
Еαст= Rя∙Iст=0,092∙39,65=3,65А (33)
По характеристике преобразователя определяется соответствующий
Еαст=3,65 угол αст=88,6. По характеристике СИФУ - обеспечивающий этот угол управляющий сигнал Uуст=3А.
Коэффициент передачи токовой отсечки
Кто=(Uуmax-Uуст)/(Iст-Iотс)=(11-3)/(39,65-34,78)=1,64 (34)
Напряжение стабилизации стабилитрона, вводящего отсечку в действие,
Uvs2= Кто∙Iотс/Ку=1,64∙34,78/0,45=126В(35)
Выберем стабилитрона VS2 КС640А от 100 - 130 В
10. Построение статических характеристик электропривода
Электромеханические характеристики привода постоянного тока с обратной связью по скорости и нелинейной отрицательной связью по току состоят из двух участков (рис.10).

Рис. 10
На первом участке в приводе действует только отрицательная обратная связь по скорости, что обеспечивает высокую жёсткость характеристики. При больших моментах включается отсечка по току и добавляется глубокая отрицательная обратная связь, которая уменьшает выходное напряжение преобразователя и снижает жёсткость характеристики, наклон на втором участке резко увеличивается.
Построение характеристик проводится на верхней и нижней границах диапазона регулирования по характерным точкам 1-4 (рис.10).
Для верхней границы диапазона регулирования точка 1 соответствует максимальной скорости ωmах при эквивалентной нагрузке Мэ, Iэ ; точка 2 соответствует скорости идеального холостого хода.
ωоВ=ωmax+∆ωозВ=71,209+0,0167=71,226 рад/с (36)
где ∆ωозВ - перепад скорости вращения в замкнутой системе:
∆ωозВ =RдIэKд/(1+KвKд)=0,092∙31∙1,666/(1+170,90∙1,666)= 0,0167 (37)
Точка 3 соответствует началу действия отсечки при скорости ωотсВ :
ωоВ=ωmax-∆ωозВ=71,209 - 0,0046=71,204 (38)
где ∆ωоncВ - перепад скорости при возрастании тока якоря от IЭ до Iотс
∆ωотсВ =Rд∆IKд/(1+KвKд)=0,092∙(39,65-37,78)∙1,666/(1+170,90∙1,666)=
=0,0046 (39)
где ∆I=Iотс-Iэ.
Точка 4 соответствует остановке двигателя при токе стопорения IСТ.
Для нижней границы диапазона регулирования точка 1 соответствует максимальной скорости ωmin при эквивалентной нагрузке Мэ, Iэ ; точка 2 соответствует скорости идеального холостого хода.
ωоН=ωmшт+∆ωозН= (36’)
где ∆ωозН - перепад скорости вращения в замкнутой системе:
∆ωозН =RдIэKд/(1+KвKд) (37’)
Точка 3 соответствует началу действия отсечки при скорости ωотсВ :
ωоВ=ωmax-∆ωозВ= (38’)
где ∆ωоncВ - перепад скорости при возрастании тока якоря от IЭ до Iотс
∆ωотсВ =Rд∆IKд/(1+KвKд) (39’)
где ∆I=Iотс-Iэ.
Точка 4 соответствует остановке двигателя при токе стопорения IСТ.