

7. Расчёт индуктивности уравнительных реакторов и параметров якорной цепи
Суммарная индуктивность уравнительных реакторов, необходимых для ограничения уравнительных токов в реверсивных схемах (рис. 5), выбирается по формуле:
L∑ур=U2mKур/(2πfIур)=104∙0,65/(2π∙50∙6,2)= 0,0347 Гн (13)
где U2m - амплитудное напряжение вторичной обмотки силового трансформатора, фазное для трёхфазной нулевой схемы (104В);
f - частота (50 Гц);
ур =(0,1-0,3)Iн =0,2∙31=6,2A- среднее значение уравнительного тока:
Кур - коэффициент, равный 0,65 для трёхфазной нулевой схемы. Индуктивность каждого уравнительного реактора может быть принята
Lyр= (0,5 - 0,7) L∑ур=0,6∙0,0347=0,0208 Гн.
Индуктивность якорной цепи рассчитывается исходя из условия, что величина пульсаций тока не должна превышать 2 - 5 %, т.е. максимальная величина пульсаций
Пmax=( 0,02-0,05 )IН=0,035∙31=1,085 А.
Для уменьшения пульсаций тока в цепь якоря включается сглаживающий фильтр L (рис. 5).
При этом должно выполняться условие:
КпЕαо/Хя=<Iпmax, (14)
Требуемое индуктивное сопротивление якорной цепи определяется по формуле:
Хя=КпЕαо/Iпmax=0,52∙120,93/1,085=57,96ом (15)
Требуемая индуктивность якорной цепи
Lя=Хя/(2π∙f∙m)= 57,96/(2π∙50∙3)=0,0615 Гн. (16)
Расчётная индуктивность якорной цепи будет складываться из индуктивностей якоря и уравнительного реактора:
Lр = Lд + Lур=0,073+0,0208=0,0973 Гн (17)
Если расчётная индуктивность меньше, чем требуемая, в цепь устанавливается сглаживающий фильтр с индуктивностью
LФ = Lя - Lр. (18)
Активное сопротивление якорной цепи
Rя = КtRд + RT + Rур + Rф=1,2∙0,092+0,321+0,0645+0,0645=0,56ом (19)
где Rд - сопротивление якоря двигателя:
Rд ~=0,5∙Uн(1-ηн)/Iн=0,5∙44(1-0,87)/31=0,092ом.
ηН=0,87;
Кt| - коэффициент, учитывающий изменение сопротивления при нагреве,
Kt= 1,2;
Rт - сопротивление обмоток трансформатора, приведённое к цепи выпрямленного тока: RT = 0,06U2/I2=0,06∙104/19,42=0,321 ом.
Rур и Rф - сопротивления уравнительного реактора и фильтра; можно принять ориентировочно, исходя из условия, что падение напряжения на этих элементах при нормальном токе не должно превышать 2 В, т.е. Rур=Rф=2/IH=2/31=0,0645ом.
. Оценка статической ошибки регулирования
Оценка статической ошибки проводится на верхней и нижней границах диапазона регулирования. Она включает в себя определение коэффициентов передачи отдельных звеньев системы и общего коэффициента передачи, вычисление ошибки регулирования в разомкнутом и замкнутом состоянии. По результатам вычислений и допустимому значения ошибки, определённому заданием, задаётся коэффициент передачи усилителя.
Статическая характеристика систем импульсно-фазового управления (СИФУ), используемых в серийных приводах, показана на рис. 6

Рис. 6
В режиме непрерывных токов ЭДС тиристорного преобразователя является функцией угла управления α и определяется выражением:
Eα=Eα0cosα. (20)
На основании этого выражения строится статическая характеристика тиристорного преобразователя, показывающая значение ЭДС при изменении угла а от 0 до 90° (рис. 7).
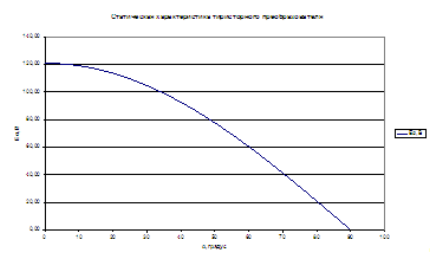
Рис. 7
Определяется ЭДС преобразователя на верхней границе диапазона регулирования:
ЕαВ=ωmax/Кд+IнRн=71,2/1,666+31∙0,092=45,6 В (21)
По характеристике тиристорного преобразователя определяется угол управления α в=68°, обеспечивающий Еαв=45,6.
Определяется ЭДС преобразователя на нижней границе диапазона регулирования:
ЕαН=ωmшт/Кд+IнRн=1,02/1,666+31∙0,092=3,5 В (21’)
По характеристике тиристорного преобразователя определяется угол управления α в=88°, обеспечивающий Еαв=3,5.
Определяется ЭДС преобразователя на номинальной скорости регулирования:
ЕαНом=ωНом/Кд+IнRн=54,78/1,666+31∙0,092=35,8 В (21”)
По характеристике тиристорного преобразователя определяется угол управления α в=72°, обеспечивающий Еαв=35,8.
Коэффициент передачи преобразователя на верхней и нижней границах диапазона регулирования определяется как отношение численных значений (В/град) проекций участка касательной, проведённой в точке, соответствующей Еαв и Еαн (рис. 7):
КВтп= ∆ЕВα/∆αВ =(45,6-35,8)/(72-68)=2,47 (22)
КНтп= ∆ЕНα/∆αН =(35,8-3,5)/(88-72)=2,02 (22’)
По характеристике СИФУ (рис. 6) определяется напряжение управления
UyB=4,0, соответствующее α в=68°.
По характеристике СИФУ (рис. 6) определяется напряжение управления
UyН=3,0, соответствующее α н=88°.
По характеристике СИФУ (рис. 6) определяется напряжение управления
UyНом=3,5, соответствующее α ном=72°.
Коэффициент передачи СИФУ на верхней и нижней границах регулирования определяется аналогично определению Ктп:
КВсифу= ∆αВ/∆Uу=(88-72)/(4-3,5)=32 (23)
КНсифу= ∆αН/∆Uу=(72-68)/(3,5-3)=8 (23’)
Общий коэффициент передачи системы на верхней границе регулирования
КВ=КВСИФУКВтпКдКтг=32∙2,47∙1,666∙1,3=170,90 (24)
Общий коэффициент передачи системы на нижней границе регулирования
КН=КНСИФУКНтпКдКтг=8∙2,02∙1,666∙1,3=6,98 (24’)
Наибольший перепад скоростей на верхней границе регулирования в разомкнутом состоянии
∆ωВр=∆ωд +∆UВcКд=4,26+4,46∙1,666=11,26, (25)
Наибольший перепад скоростей на нижней границе регулирования в разомкнутом состоянии
∆ωВр=∆ωд +∆UВcКд=4,26+0,347∙1,666=4,84 (25’)
где ∆ωд - перепад скорости вращения двигателя при неизменной ЭДС и изменении нагрузки в заданных пределах:
∆ωд=(МСmax-МСmin)/МнIнRяКд=(16,70-4,17)/14∙31∙0,092∙1,666=4,26
∆Uс - наибольшая величина колебаний напряжения преобразователя, вызванная колебаниями напряжения в сети:
∆Uсв = 0,1 Еав=0,1∙45,60=4,46В, ∆Uсн = 0,1 Еон =0,1∙3,47=0,347В
Статическая ошибка на верхней границе регулирования в разомкнутом остоянии системы
δВр=∆ωВр/ωmax100%=11,26/71,21∙100% =16,66 (26)
Статическая ошибка на нижней границе регулирования в разомкнутом cостоянии системы
δНр=∆ωНр/ωmin100%=4,84/1,01∙100=1,1∙100% =479,2 (26’)
Статическая ошибка на верхней границе регулирования в замкнутом состоянии системы
δВ= δВр/(1+Кв)=16,66/(1+170,90)=0,097 (27)
Статическая ошибка на нижней границе регулирования в замкнутом состоянии системы
δН= δнр/(1+Кн)= 479,2/(1+6,98)=59,57 (27’)
Требуемое значение коэффициента передачи системы, обеспечивающее статическую ошибку не больше допустимой по заданию,
Ктр= δВр/δ-1=59,57/ 15-1=2,97 (28)
С учётом Ктр определяется минимальный коэффициент усиления усилителя:
Ку >=Ктр/Кн =2,97/6,98=0,45 (29)