

1. Кинематическая схема привода
При выборе кинематической схемы привода надо стремиться к максимальному приближению источника движения к исполнительному органу. В приводе подачи для преобразования вращательного движения в поступательные наиболее часто используется пара «винт-гайка». Ходовой винт может быть соединён с валом двигателя непосредственно соединительной муфтой (СМ) (рис. 1), через механическое передаточное устройство (МПУ) (рис.2). Конструктивные параметры ходового винта шаг h=6мм, диаметр наружный DH=36мм, диаметр средний DCP=33мм выберем [1] таблице приложения 1. Длина вала выбирается произвольно в пределах 400 - 1000 мм. Размеры рабочей поверхности стола: длина от 630 до 1600 мм, ширина от 200 до 400 мм.
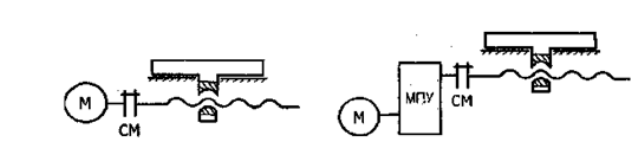
Рис. 1 Рис. 2
Исходя из заданной максимальной скорости подачи и параметров кинематической схемы определяется максимальная частота вращения двигателя:
nmax=Smaxi/h=1700∙2,4/6=680 об/мин. (1)
Минимальное значение подачи Smin определяется с учётом заданного диапазона регулирования:
Smin=Smax/D=1700/70=24мм/мин, (2)
Минимальная частота вращения двигателя
nmin=Smini/h=24∙2,4/6=9,6 об/мин. (3)
Высокомоментные двигатели серии ПБВ, применяемые в приводах подачи, предназначены для эксплуатации с частотой вращения в пределах 0,1-2000 мин'1. Значения nmin и nmax попадают в этот диапазон.
2. Приведение сил и моментов сопротивления
Сила Pi; препятствующая движению подачи и по заданию на проект меняющая свою величину во времени, складывается из сил резания и трения. Эта сила на ходовом винте преобразуется в момент сопротивления:
Mi=PiDсрtg(α+β)/2, (4),
где Dср - средний диаметр ходового винта, м;
α - угол наклона резьбы ходового винта:
α = arctg(h/π/Dср)= arctg(6/π/33)=3,312°.
β - угол трения ходового винта β=arctg(f)= arctg(0,18)=10,204°.
где f- коэффициент трения скольжения, для пары сталь - бронза f=0,18.
Приведённый к валу двигателя момент сопротивления
Mci=Mi/ηп/I (5)
где ηп - КПД соответствующего МПУ (ηп=0,95).
Результаты расчётов сведены в таблицу 1
|
№ |
Pi, Н |
Mi, Нм |
Mсi, Нм |
|
1 |
1000 |
3,97 |
4,17 |
|
2 |
4000 |
15,86 |
16,70 |
|
3 |
3000 |
11,90 |
12,52 |
На основании рассчитанных значений приведённого момента сопротивления строится нагрузочная диаграмма на рис. 3.
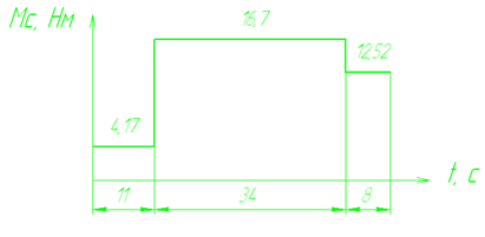
Рис. 3
3. Выбор электродвигателя
Выбор электродвигателя производится методом эквивалентного момента с использованием нагрузочной диаграммы (рис. 3).
Mэ=√((M2c1t1+ M2c2t2+ M2c3t3)/( t1+ t2+ t3))=
√((4,17211+ 16,70234+ 12,522c38)/(11+ 34+ 8)=13,62 Нм (6)
По [1] таблице приложения 2 выбирается двигатель, у которого номинальный момент больше или равен эквивалентному (Мн > Мэ) - ПБВ 1125.
Для дальнейших расчётов потребуются следующие параметры двигателя:
Номинальная мощность Рн=1,1 кВт
Номинальное напряжение UH=44, В
Номинальный ток 1н=31, А
Номинальный момент Мн=1,4, Нм
Индуктивность якоря Lд=0,73 мГн
Момент инерции Jд=0,035 кгм2
Номинальная скорость ωнд=πn/30=π700/30=73,3 1/с
Коэффициент передачи двигателя Кд=ωнд/Uн=73,3/44=1,666 1/(Вс)
Электромеханическая постоянная времени Тд=0,013 с
Коэффициент передачи тахогенератора, встроенного в электродвигатель, Ктг=1,3 Вс.