

3.9 Электрическая схема корректирующего устройства
По передаточной
функции
 составим электрическую
схему корректирующего устройства.
Для этого сначала перепишем ее в
стандартном виде с учетом новых
обозначений постоянных времени
составим электрическую
схему корректирующего устройства.
Для этого сначала перепишем ее в
стандартном виде с учетом новых
обозначений постоянных времени
 :
:
 ,
,
где
 ,
, ,
, ,
, ,
, ,
, .
.
Способ 1.
Представим
 в виде произведения четырех передаточных
функций типовых корректирующих цепей:
в виде произведения четырех передаточных
функций типовых корректирующих цепей:
 .
.
Поскольку
 ,
то первым двум передаточным функциям
будут соответствовать пассивные
интегрирующие цепочки, разделенные
повторителем напряжения для исключения
взаимного влияния цепей, в результате
которого изменяется общая передаточная
функция. Учитывая, что
,
то первым двум передаточным функциям
будут соответствовать пассивные
интегрирующие цепочки, разделенные
повторителем напряжения для исключения
взаимного влияния цепей, в результате
которого изменяется общая передаточная
функция. Учитывая, что ,
последним двум передаточным функциям
будут соответствовать активные
дифференцирующие цепи.
,
последним двум передаточным функциям
будут соответствовать активные
дифференцирующие цепи.
В соответствии с
таблицей П.1 электрическая схема
корректирующего устройства с передаточной
функцией
 представлена на рис. 27.
представлена на рис. 27.
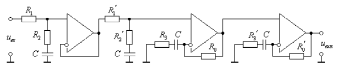
Рис. 27
По известным
значениям постоянных времени, задаваясь
величиной емкости
 мкФ,
найдем величины:
мкФ,
найдем величины:
первый каскад
 Мом,
Мом,
 Мом;
Мом;
второй каскад
 Мом,
Мом,
 Мом;
Мом;
Здесь малым выходным
сопротивлением операционного усилителя
пренебрегаем по сравнению с сопротивлением
 .
.
третий каскад
 Мом,
Мом,
 Мом;
Мом;
четвертый каскад
 Мом,
Мом,
 Мом.
Мом.
Способ 2.
Учитывая, что
 ,
, и
и ,
, ,
представим
,
представим в виде произведения
в виде произведения
 ,
,
где
 ,
, ,
, .
.
Тем самым для
реализации корректирующего устройства
согласно таблице П.1 необходимо
использовать две интегро-дифференцирующие
цепи, разделенные усилителем с
коэффициентом усиления
 (рис. 28).
(рис. 28).
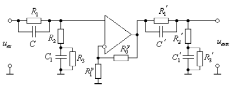
Рис. 28
По известным
значениям постоянных времени, задаваясь
величиной электроемкостей
 мкФ,
мкФ, мкФ найдем величины:
мкФ найдем величины:
первый каскад
 0,96
Мом,
0,96
Мом,
 ,
,
 0,069
Мом,
0,069
Мом,
 4,33
Мом,
4,33
Мом,
 0,589
мкФ;
0,589
мкФ;
второй каскад
 Мом,
Мом,
 0,482,
0,482,
 0,26
Мом,
0,26
Мом,
 2,78
Мом,
2,78
Мом,
 1,37
мкФ;
1,37
мкФ;
неинвертирующий операционный усилитель
полагая
 Мом, найдем
Мом, найдем
 ,
,
 Мом.
Мом.
Учитывая, что
сопротивления
 ,
, ,
, ,
, ,
, ,
, имеют значения
порядка Мом, для операционного усилителя
будет выполнено ограничение по току
[30, с. 16-17].
имеют значения
порядка Мом, для операционного усилителя
будет выполнено ограничение по току
[30, с. 16-17].
Таким образом, второй способ реализации корректирующего устройства проще и экономичнее первого.
Окончательный
выбор найденных элементов электрической
схемы осуществляется с помощью номинальных
паспортных элементов. Если при этом
постоянные времени передаточной функции
корректирующего устройства будут
отличаться от расчетных больше чем на
3%, то необходимо построить переходную
характеристику замкнутой системы с
полученной передаточной функцией
корректирующего устройства и проверить
выполнение условий
 ,
, .
При нарушении данных условий необходимо
доопределить параметры элементов
корректирующего устройства.
.
При нарушении данных условий необходимо
доопределить параметры элементов
корректирующего устройства.
Оценить влияние изменения постоянных времени передаточной функции корректирующего устройства на качество переходных процессов замкнутой системы также можно с помощью ЛАХ и ЛФХ нескорректированной и желаемой системы.
3.10 Синтез дискретного корректирующего устройства
На практике часто возникает задача замены непрерывных регуляторов дискретными регуляторами, как более надежными и эффективными средствами управления. При этом необходимо, чтобы дискретная система обладала теми же свойствами, что и непрерывная.
Структурная схема
системы с дискретной коррекцией
представлена на рис.29, где сигнал с
идеального импульсного элемента
 поступает на вход передаточной функции
дискретной коррекции, выходной сигнал
которой
поступает на вход передаточной функции
дискретной коррекции, выходной сигнал
которой поступает на формирователь прямоугольных
импульсов (фиксатор нулевого порядка)
длительностью
поступает на формирователь прямоугольных
импульсов (фиксатор нулевого порядка)
длительностью .
Тем самым на вход объекта управления с
передаточной функцией
.
Тем самым на вход объекта управления с
передаточной функцией поступает кусочно-постоянный сигнал:
поступает кусочно-постоянный сигнал: при
при
 ,
,
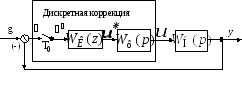
Рис. 29