

10 Расчет мощности и выбор электродвигателя
Основным требованием при выборе электродвигателя является соответствие его мощности условиям технологического процесса. При выборе электродвигателя должно проверяться также его соответствие условиям пуска рабочей машины и возможным перегрузкам. Выбор электродвигателя производится с учетом следующих показателей: вид тока и соответствие напряжений; Значение скорости, с учетом передаточного отношения редуктора. Конструктивное исполнение- расположения его валов и способы крепления; Способ вентиляции и защиты от воздействия окружающей среды. От этого зависят долговечность его работы и безопасность обслуживания. По способу защиты от воздействия окружающей среды различают открытые, защищенные и герметичные двигатели. Обычно двигатель выбирают в следующей последовательности:Расчет мощности и предварительный выбор двигателя; Проверка выбранного двигателя по условиям пуска и перегрузкам; Проверка выбранного двигателя по нагреву.
Если выбранный двигатель в ходе проверок не удовлетворяет требованиям, то выбирают другой двигатель (как правило, большей мощности) и проверки повторяются.
Основой для расчета мощности и выбора электродвигателя является нагрузочная диаграмма М(t) и диаграмма скорости(t) исполнительного органа рабочей машины (рис.11.1).

Рис. 11.1 К расчету мощности двигателя: а) нагрузочная диаграмма исполнительного механизма; б) диаграмма скорости нагрузочного механизма приведенного к валу двигателя; в) динамический момент; г) суммарный момент
Расчет ведем в следующей последовательности:
Определяем номинальный момент двигателя. Если эквивалентный момент нагрузки Мс.эзадан, то расчетный номинальный момент двигателя
Мномkз.Мс.э ,
где kз = 1.11.3 – коэффициент запаса, предварительно учитывающий динамические режимы работы электродвигателя..
Находим номинальную расчетную мощность двигателя
Рном= Мном.ном;
Из каталога выбираем двигатель ближайшей большей мощности, имеющий конструктивное исполнение, соответствующее условиям работы данной машины;
Осуществляем проверку двигателя по перегрузочной способности. Для этого строим зависимость суммарного момента двигателя от времени (рис.21г)
Мcум(t) = Mc + Jc d / dt,
где Jc– суммарный момент инерции привода.
Для проверки двигателя по перегрузочной способности сопоставляем максимальный (критический) момент двигателя Ммахс максимальным моментом М1взятым из зависимости Мcум(t). Должно выполняться следующее неравенство
МмахМ1;
5) Проверяем асинхронный двигатель по условиям пуска, для чего сопоставляем его пусковой момент с моментом нагрузки при пуске: МпМс.п.
11 механика приводов станков с ЧПУ Рассмотрим структуру механической части электропривода вращательного движения (рис.1.1), включающую двигатель Д, преобразователь механический ПМ и исполнительный орган рабочего механизма ИО для случая, когда по условиям производственного процесса должны регулироваться линейная vио или угловая ио скорость.
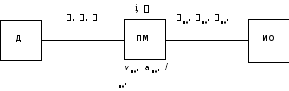
Рис. 1.1 Схема механической части электропривода
Если в приводе использован двигатель вращательного движения, то его скорость и скоростьио (илиv ио ) исполнительного органа рабочей машины, связаны между собой:
ио =/iилиv ио =.,
где iи- передаточное число и радиус приведения ПМ.
Можно рассмотреть два возможных способа регулирования скорости рабочего механизма: механический, с использованием ПМ с регулируемым передаточным числом iи электрический, основанный на регулировании скорости вращения электродвигателя.
Вследствие невысокой надежности и сложности автоматизации механического способа, в настоящее время в большинстве случаев применяется электрический способ регулирования скорости. Однако для ряда рабочих машин (например, для металлургических станков) применяется комбинированный способ регулирования скорости.
Наряду с регулированием скорости, может осуществляться также регулирование линейного аиоили угловогоиоускорения и линейногоlиоили угловогоиоположения исполнительного органа рабочей машины.
При анализе механической части электропривода следует иметь в виду, что момент сопротивления механизма состоит из двух слагаемых – полезной работы и работы сил трения.
Полезная работа, связана с выполнением производственным механизмом соответствующей технологической операции. Работа сил трения обычно учитывается КПД механических связей привода.
Движение электропривода в общем случае может происходить в двух режимах – установившемся, при неизменной скорости движения ( в т.ч. = 0) и переходном (динамическом).
Условием установившегося движения является равенство моментов вращения (двигателя) и сопротивления (нагрузки) М = Мс.
Моменты сопротивления можно разделить на две категории – реактивные иактивные.
 Механической
характеристикой двигателя называется
зависимость его угловой скорости от
развиваемого им момента(М).
Различают естественную и искусственные
характеристики двигателей. Естественной
называется механическая характеристика
двигателя, которая соответствует
основной схеме включения двигателя,
номинальным параметрам питающего
напряжения и отсутствию в электрических
цепях двигателя дополнительных элементов.
Механической
характеристикой двигателя называется
зависимость его угловой скорости от
развиваемого им момента(М).
Различают естественную и искусственные
характеристики двигателей. Естественной
называется механическая характеристика
двигателя, которая соответствует
основной схеме включения двигателя,
номинальным параметрам питающего
напряжения и отсутствию в электрических
цепях двигателя дополнительных элементов.

На рис. 1.4. а показаны естественные механические характеристики наиболее распространенных двигателей: 1 – синхронного двигателя, 2 – двигателя постоянного тока независимого возбуждения, 3 – двигателя постоянного тока последовательного возбуждения, 4 – асинхронного двигателя. Характеристика 5 – пример абсолютно мягкой механической характеристики.
На рис.1.4 б показаны приведенные к валу двигателя механические характеристики (Мс) некоторых исполнительных органов. Характеристика 1, в виде прямой вертикальной линии, соответствует различным подъемным механизмам. Ее отличительной особенностью является неизменное направление момента нагрузки Мс, не зависящее от знака скорости (активный момент). Характеристика в виде ломанной линии 2 соответствует исполнительному органу, сопротивление которого создается главным образом силами трения. Ее также называют характеристикой сухого трения. Такой (или близкой к ней) характеристикой обладают механизмы подачи станков, горизонтальные конвейеры и транспортеры, механизмы передвижения подъемных кранов. Момент нагрузки этого вида направлен навстречу движению и являетсяреактивным.
Кривая 3 характеризует момент нагрузки вентиляторов, центробежных компрессоров, дымососов, который обычно пропорционален квадрату скорости. Характеристики вида 3 называют вентиляторными. Характеристикой вида 4, близкой к гиперболической зависимости, обладают механизмы главного движения токарных и фрезерных станков, различные наматывающие устройства.
Для полного анализа режима установившегося движения (устойчивой работы) необходимо определить, является ли движение устойчивым. Статически устойчивым будет такое установившееся движение, которое, будучи выведенным из установившегося режима каким-либо внешним возмущением, возвращается в этот режим после исчезновения этого возмущения

Рис.1.6 К понятию устойчивости
Регулирование скорости, тока и момента ДПТ
Регулирование скорости, тока и момента с помощью резисторов в цепи якоря
прост в реализации и широко используется для регулирования скорости и момента ДПТ независимого возбуждения.

> Rд1
Диапазон регулированияскорости (D) небольшой,
Направление регулирования– вниз относительно естественной характеристики;
Плавность регулирования невелика
скорость невысока;
потери мощности в двигателе прямо пропорциональны относительному изменению скорости . Так, например, при снижении скорости в 2 КПД - 50%.
Допустимая нагрузкасоответствует номинальному моменту двигателя
реостатное регулирование скорости из-за простоты реализации используется достаточно широко - тогда, когда требуется небольшой диапазон регулирования или когда работа на пониженных скоростях имеет кратковременный характер:
Полученные искусственные характеристики широко используют для ограничения тока и момента в переходных режимах (пуск, торможение), когда ток и момент могут стать недопустимо большими.
Динамическое торможение осуществляется отключением якоря от сети и его замыканием на сопротивление Rд2.
Реверс или торможение противовключением осуществляется изменением полярности приложенного к якорю напряжения, с одновременным включением в цепь якоря резистора Rд3Регулирование скорости изменением магнитного потока
Способ регулирования скорости ДПТ независимого возбуждения путем изменения магнитного потока находит широкое применение в электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в маломощной цепи возбуждения.
Возможные схемы включения обмотки возбуждения ДПТ независимого возбуждения приведены на рис. 8.4 б и в. Схема 8.4б предусматривает включение в цепь обмотки возбуждения переменного сопротивления, в схеме 8.4в для изменения тока возбуждения используется управляемый выпрямитель УВ, напряжение которого регулируется сигналом управления Uу. Эта схема более экономична, и применяется для регулирования тока возбуждения мощных двигателей.

б)
а) в)
Однако регулирование скорости изменением магнитного тока практически возможно только вверх, так как в насыщенной системе изменение потока за счет изменения тока возбуждения Iвможет производиться только в сторону его уменьшения (ослабления) относительно номинального значения. Увеличение же тока возбуждения приводит к весьма незначительному увеличению потока
Уменьшение потока приводит к увеличению (8.5) скорости идеального холостого хода 0. Пусковой ток (или ток короткого замыкания)Iп=U/Rяот магнитного потока не зависит, в отличие от пускового момента Мп=C.Ф.Iп, который с уменьшением потока падает.
Диапазон регулированияпри данном способе средний, направление регулирования - вверх, а плавность определяется плавностью регулирования тока возбуждения. Стабильность достаточно высока, хотя она и снижается с ростом скорости.
Способ экономичен, так как не сопровождается значительными потерями мощности, а его реализация не требует больших затрат. Однако вследствие уменьшения потока двигатель не может быть нагружен номинальным моментом - момент снижается в той же степени, что и поток. Однако, учитывая возрастание скорости, рассмотренный способ регулирования способен осуществлять регулирование при постоянной мощности.
Данный способ регулирования скорости нашел широкое применение в электроприводе металлорежущих станков, прокатных станов и наматывающих устройств. Он также может использоваться в комбинации с другими способами регулирования скорости.
Регулирование скорости изменением подводимого к якорю напряжения
Р егулирование
скорости данным способом осуществляется
по схеме рис. 8.6, в которой якорь питается
от источника (управляемого выпрямителя)
постоянного тока П, образуя систему
преобразователь–двигатель (П-Д). Обмотка
возбуждения ОВ питается от отдельного
источника постоянного тока, например
от неуправляемого выпрямителя.
егулирование
скорости данным способом осуществляется
по схеме рис. 8.6, в которой якорь питается
от источника (управляемого выпрямителя)
постоянного тока П, образуя систему
преобразователь–двигатель (П-Д). Обмотка
возбуждения ОВ питается от отдельного
источника постоянного тока, например
от неуправляемого выпрямителя.
Из (8.8) и (8.9) следует, что при изменении Еппропорционально изменяется скорость идеального холостого хода, однако сами характеристики имеют больший наклон из-за наличия сопротивленияRп. На рис. 8.6 для сравнения показана также естественная характеристика ДПТ с независимым возбуждением при питании от источника бесконечно большой мощности. Характеристики располагаются во всех четырех квадрантах, а при Еп= 0 двигатель работает в режиме динамического торможения.
При использовании в качестве преобразователя П генератора постоянного тока (рис.8.7), получаем систему, получившую название генератор–двигатель(Г-Д). Тут якорь двигателя непосредственно соединен с якорем генератора. Регулирование происходит как за счет изменения напряжения генератора, так и за счет изменения потока двигателя.

ОВГ ОВД
Основными достоинствами системы Г-Д является большой диапазон и плавность регулирования скорости ДПТ, высокая жесткость и линейность характеристик, возможность получения всех энергетических режимов работы, в том числе и рекуперативного торможения. Недостатками являются утроенная установленная мощность электрических машин, низкий КПД, большая инерционность процесса регулирования, шум.
Разомкнутый способ реализации ШИМ для одной фазы, при коэффициенте модуляции (отношении амплитуд синусоидального и пилообразного сигналов) = 1, иллюстрирует рис. 1.3.
Сигнал от генератора пилообразного напряжения (ГПН) Uгпн сравнивается с синусоидальным напряжением Usin, частота и фаза которого определяют частоту и фазу напряжения в рассматриваемой фазе. Если синусоидальный сигнал больше пилообразного, вырабатывается логический сигнал «да» (+1), и на нагрузку подается напряжение +Uн, в противном случае вырабатывается сигнал «нет» (-1), и на нагрузку подается напряжение –Uн. Соответствующий блок [5] дан в схеме к лабораторной работе № 2. Анализ гармонического состава напряжения на нагрузке, получаемого при использовании ШИМ, показывает, что определяющее влияние на гармонический состав выходного напряжения оказывает отношение несущей частоты (частоты пилообразного сигнала) к выходной (основной) частоте инвертора = fo / f1, равное примерно 20 – 60.
13.Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин. Такой привод иногда называют трансмиссионным приводом.
Групповой электропривод обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и ее распределение между ними производится с помощью одной или нескольких трансмиссий.
Групповой электропривод на переменном токе применяется для одноковшовых строительных экскаваторов.
Групповой электропривод, когда ряд механизмов приводится в движение от одного двигателя, не находит применения в современной практике, так как он обладает рядом существенных недостатков, из которых главные-сложность управления каждым механизмом, исключающая возможность автоматизации, а также большие потери энергии в передачах.
Для групповых электроприводов применяют асинхронные двигатели; для индивидуальных приводов - двигатели постоянного тока и асинхронные двигатели.
При групповом электроприводе несколько рабочих механизмов или машин с помощью соответствующей системы передачи приводятся в действие от одного и того же электродвигателя. Иными словами, движение от одного электродвигателя с помощью соответствующих устройств передается одновременно нескольким механизмам и машинам. При этом электродвигатель передает кинетическую энергию через особое устройство, являющееся распределителем мощности для многих механизмов.
Следует указать, что групповой электропривод применяется обычно с асинхронными двигателями мощностью 50 н - 150 кет, при этом механические передачи и фрикционные муфты, применяемые в таком приводе, делают его громоздким и менее надежным, чем индивидуальный.
В процессе опробования агрегатов с групповым электроприводом сначала прокручивают каждый электродвигатель, а затем все вместе. Убедившись, что силовые агрегаты работают нормально, можно приступить к опробованию с суммирующими трансмиссиями. Если привод работает нормально, то опробуют буровую лебедку без каната. При этом проверяют правильность работы и включения пневматических муфт, легкость переключения передач, включение вспомогательного тормоза, регулятора подачи долота, срабатывание всех блокировок. Все замеченные недостатки и неисправности должны быть устранены. После этого испытывают вращение ротора на всех частотах вращения на холостом ходу.