

Роботы
.pdfправлением нормали к последней указанной плоскости.
В этой системе для данной кинематической структуры не происходит учета каких-либо перемещений, обусловленных изменением обобщенных координат, однако ее удобно использовать для описания линейных смещений точки С вращательной кинематической пары 8, вызванных наличием постоянных параметров структуры – размерами и топологией звеньев.
Система 8 служит для описания поворота звена 8 относительно звена 7, обеспечиваемого изменением значения обобщенной координаты α8 во вращательной кинематической паре 8, соединяющей указанные звенья. Начало этой системы находится в точке С (рис.2.5). Ось z8 направлена вдоль оси вращения, ось х8 совмещена с линией звена 7 и исходит из точки С, ось у8 перпендикулярна плоскости звена и дополняет правую тройку координатных векторов. В этом случае также удалось сонаправить оси у систем 7 и 8.
Угол α8, отсчитываемый от положительного направления оси х8 (т.е. фактически от осевой линии звена 7), фиксирует осевую линию звена 8. Другими словами, угол α8 заключен между двумя звеньями.
Система 9 является собственной для звена 9, относительно которой описывается ротация схвата. Ось z9 совпадает с осью ротации, ось х9 параллельна оси z8, а направление оси у9 делает данную систему координат правосторонней. Следует отметить, что при α8 =180o оси у систем 8 и 9 будут сонаправлены (рис. 2.5).
Обобщенная координата α9, описывающая ротацию звена 9, отсчитывается от положительного направления оси х9 и фиксирует плоскость звена 9. В частности на рис. 2.5 изображен случай, когда α9 = 0o .
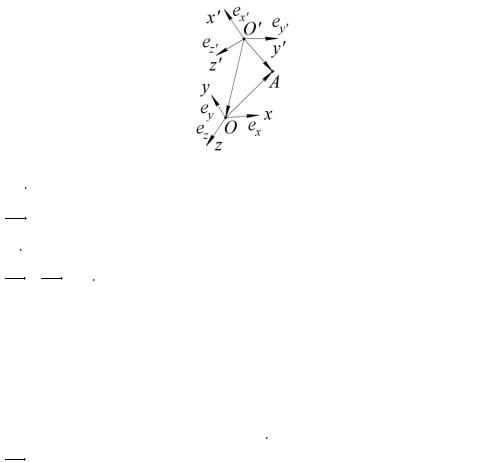
Подытоживая результаты этого этапа решения прямой задачи о положениях, необходимо отметить, что в том положении кинематической структуры, которое изображено на рис. 2.5, на нас направлены следующие оси: х0, z1, х2, х3, z4, z5, z6, y7, y8, y9. На эскизе порядок их изображения следующий: выбирается направление под произвольным углом и принимается, что в этом направлении будут откладываться координатные вектора, перпендикулярные плоскости листа. Причем, если вектора направлены на нас, то рекомендуется ориентировать их вдоль выбранного направления смотрящими вниз, в то время как направленные от нас – смотрящими вверх. Например, на рис. 2.5 указанные выше вектора параллельны друг другу при любой взаимной ориентации звеньев структуры и смотрят в левый нижний угол, в то время как идущие от нас вектора, сохраняя параллельность смотрели бы в верхний правый угол листа.
21
2.3.Преобразования систем координат
2.3.1.Общие принципы преобразования систем координат
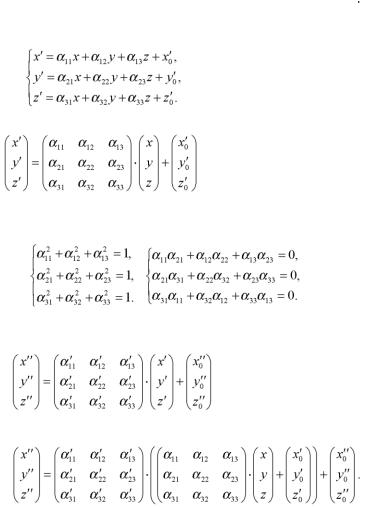
Пусть в пространстве введены две общие декартовы системы координат xyz и х'у'z' (рис.2.6.). Выразим координаты произвольной точки А в системе координат x'y'z' через координаты ее в системе xyz.
Рис. 2.6. Преобразование двух общих декартовых систем координат Имеем
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
О' A x'e |
|
' |
|
y'e |
y |
' |
z'e |
' |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x |
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
y' |
|
|
' z' |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
О'O x' e |
|
' |
e |
|
e |
|
' |
|
|
|
|
|
|
|
|
|
|
||||||||
0 |
x |
|
|
0 |
|
y |
|
0 |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОA xex' |
yey' |
zez' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
О' A О'O ОA (x' |
|
|
|
|
y' |
|
' z' |
|
|
|
|
|
|
|
|
||||||||||
e |
|
' |
|
e |
e |
' ) (xe |
' ye |
' ze |
' ) |
|
|
|
|||||||||||||
|
|
|
|
|
0 |
x |
|
|
|
0 |
y |
0 |
z |
x |
y |
z |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Векторы ex |
, ey |
, ez |
допускают однозначное представление через векторы e |
' , e |
' , e |
' |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
z |
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
e |
|
e |
e |
' |
|
e |
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
x |
|
11 x |
|
|
|
12 y |
|
|
|
|
13 z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ey 21ex' 22ey' |
23ez' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
e |
z |
|
e |
|
e |
' |
|
e |
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
31 x |
|
|
|
32 y |
|
|
|
|
33 z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где ij - координаты векторов ex |
, ey |
, ez |
относительно базиса e |
|
' , e |
' , e |
' |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
z |
|
|
Подставляя эти выражения в формулу для О' A , получим: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
О' A (x |
' |
|
x |
|
y |
|
|
|
|
|
( y' |
|
x |
|
y |
|
|
|
|
|
|
|
||||||||||||||
11 |
12 |
13 |
z)e |
' |
21 |
22 |
23 |
z)e |
|
' |
|
|
||||||||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
x |
|
|
0 |
|
|
|
|
y |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(z' |
|
x |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
31 |
32 |
33 |
z)e |
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
Выражения в скобках в этой формуле суть координаты вектора О' A относительно
базиса |
|
|
|
|
|
, т.е. координаты точки А в системе |
' |
' |
' |
. Искомые формулы: |
e |
' , e |
|
' , e |
' |
x |
, y |
, z |
|||
|
x |
|
y |
z |
|
|
|
|
|
|
В векторно-матричной форме:
(2.2)
Если обе системы координат x, y, z и x' , y' , z' прямоугольные, то коэффициенты формул удовлетворяют условиям ортогональности
Очевидно, что для перехода от системы координат x' , y' , z' к системе x'' , y'' , z'' будет использоваться следующее выражение:
Тогда для перехода от системы x, y, z к системе x'' , y'' , z'' справедливо следующее выражение:
Следует отметить, что выше изложен метод преобразования декартовых систем координат в общем случае. Его достоинство проявляется в получении единственной матрицы перехода между двумя системами и вектора, содержащего координаты точки начала приводимой системы. Этот метод приводит к верным результатам, но довольно громоздок и потому не слишком удобен при решении прямых задач о положениях. Так, например, он трижды требует решения задачи о представлении координатных векторов старой системы в базисе координатных векторов но-
23

вой системы. Следствием этого является увеличение объема вычислительных операций вспомогательного характера и размывание конечной цели расчета.
С увеличением числа конвертируемых систем векторно-матричное уравнение перехода от первой системы к последней усложняется. Кроме этого, в конечном выражении преобразования координат используются матрица и вектор, что нарушает единообразие операций. Это несколько усложняет конструирование вычислительного алгоритма для ЭВМ. Применение механизма рекурсии при росте количества координатных систем также является неоправданным с точки зрения затрачиваемых ресурсов.
В робототехнике (и других областях науки) при решении задач конвертирования декартовых систем координат используется несколько иной подход. Основываясь на особенности исполнительных механизмов ПР, описанной во введении, а именно, что оси соседних кинематических пар или параллельны, или перпендикулярны между собой, можно существенно упростить решение прямой задачи о положениях, назначая ортогональные декартовы системы координат.
Кроме этого, при конвертации применяются расширенные матрицы перехода,
которые получаются следующим образом. Перепишем уравнение 2.2. в следующем |
||||
вид ' 0' , где ' x' , y' , z' Т , x, y, z Т , 0 |
' x0 |
' , y0 |
' , z0 |
' Т , а α - |
матрица перехода. Введем в рассмотрение матрицу 4х4 следующей архитектуры:
Или в развернутом виде
Матрица М носит название расширенной матрицы перехода
Модифицировав векторы v и v' следующим образом: ' x' , y' , z' ,1 T ,
x, y, z,1 T , получим уравнение, так же описывающее переход от одной системы координат к другой:
24
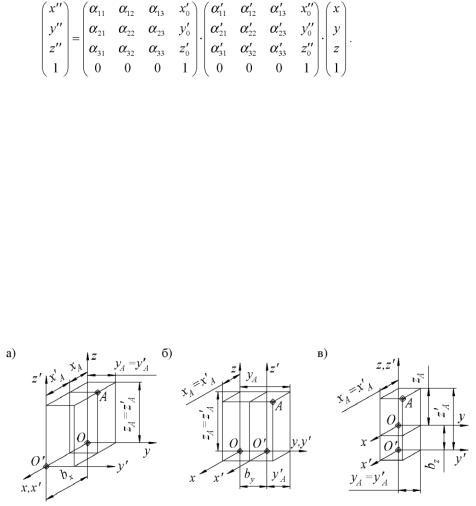
Для описания перехода от системы координат хуz к системе x'' , y'' , z'' через систему х'y'z' справедливо выражение:
При наличии n систем координат переход от системы n к системе 1 будет выглядеть так:
n
1 M1 2 M2 3 Mn 1 n 2 Mn n 1 n или 1 Mi i 1 n
i 1
Произвольной ориентации твердого тела и жестко связанной с ним системы координат можно добиться с помощью независимых (либо зависимых) друг от друга вращательных и/или поступательных смещений относительно трех осей неподвижной системы координат, что реализует принцип степеней свобод, описанный в п. 1.1.
Каждое из смещений математически описывается с помощью специальной матрицы перехода. Всего таких матриц шесть: по одной на каждую из степеней свободы. Рассмотрим далее принципы получения этих матриц.
Начнем со случаев математического описания поступательного смещения вдоль какой-либо из координатных осей. Пусть в пространстве введены две ортогональные декартовы системы координат xyz и х'у'z' с точками начал О и О' соответственно, причем одноименные оси обеих систем сонаправлены, а точка О' смещена относительно точки О на величину bx вдоль оси Ох (рис. 2.7 а).
Рис. 2.7. Линейные смещения систем координат относительно друг друга: а – вдоль оси х; б – вдоль оси у; в – вдоль оси z.
Для всех трех рассматриваемых случаев на основании сонаправленности одноименных координатных векторов имеем следующее представление векторов
25

x,
y,
|
|
|
' |
|
|
' |
' |
: |
|
|
|
|
|
|
|
|
|
|
|
z через векторы x |
, y |
, z |
|
|
|
|
|
|
|
|
|
|
|||||||
|
' |
|
|
' |
|
|
|
' |
, |
|
|
1 0 |
0 |
' |
|
||||
x |
1 x |
|
0 y |
|
|
0 z |
x |
x |
|||||||||||
|
|
' |
|
' |
|
|
|
' |
|
|
|
0 |
1 |
0 |
|
' |
|
||
y |
0 x |
|
1 y |
|
|
0 z |
,или y |
|
|
y |
|
||||||||
|
' |
|
|
' |
|
|
|
' |
|
|
|
|
|
|
|
' |
|
||
z |
0 x |
|
0 y |
|
1 z. |
z |
|
|
0 |
0 |
1 |
|
z |
|
|||||
Однако вектора O'O во всех трех случаях будут различными:
|
|
|
|
|
|
|
|
' |
|
|
' |
0 |
|
' |
0 |
' |
|
|
|
|
|
|
|
|
1) |
при смещении вдоль оси Ох: O |
O bx x |
|
y |
|
z |
; |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
' |
|
' |
by |
|
' |
|
' |
|
|
|
|
|
|
|
|
|
2) |
при смещении вдоль оси Оy: O |
O 0 x |
y |
|
0 z |
; |
|
|
|
|
|
|||||||||||
|
|
|
при смещении вдоль оси Оz: O |
' |
|
' |
|
|
' |
bz |
' |
|
|
|
|
|
|
|
|||||
|
3) |
|
O 0 x |
0 y |
z |
. |
|
|
|
|
|
|
|||||||||||
|
Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
' ' |
' ' |
' ' |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОA xA x |
yA y |
zA z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
' |
' |
|
|
' |
' |
' |
|
|
|
|
|
|
|
|
' |
' |
' |
|
' |
' |
' |
. |
|
О |
A О |
O OA (bx x |
0 y |
0 z |
) (xA x |
yA y |
zA z ) x |
A x |
|
y |
A y |
|
z |
A z |
|||||||||
|
1) |
при смещении вдоль оси Ох: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Подставляя эти выражения в формулу для О' A получим: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
О' A (bx xA 0 yA 0 zA )x' (0 0 xA yA 0 zA ) y' |
(0 0 xA 0 yA zA )z ' |
||||||||||||||||||||||
Сравнивая выражения и , получаем координаты точки А в системе x'y'z':
Ввекторно-матричной форме:
2)Решение указанной выше задачи для случая смещения точек начал двух
систем вдоль оси Оу на расстояние bу (рис.2.7 б) ведется аналогично, поэтому ниже приведено лишь векторно-матричное уравнение:
26
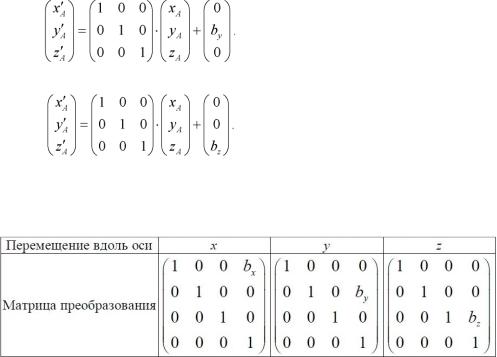
3) Для случая смещения точек начал двух систем вдоль оси Оz на расстояние bz (рис.2.7 в) имеется следующее векторно-матричное уравнение:
Расширенные матрицы перехода для рассмотренных случаев приведены в табл. 2.1.
Таблица 2.1 Расширенные матрицы преобразования координат
для учета линейных смещений
Следует отметить, что они коммутируют между собой, а также любая из этих матриц коммутирует с матрицей, полученной при перемножении двух других. Это математическое свойство находит подтверждение и при анализе действий, описываемых матрицами. Ведь если объект необходимо доставить в точку с координатами (x,y,z), то не важна очередность перемещения объекта вдоль координатных осей, чтобы доставить его в заданную точку. Таким образом, можно использовать вместо трех одну универсальную матрицу, учитывающую линейные смещения приводимой системы относительно той, к которой приводят:
1 0 |
0 |
b |
|
1 0 0 |
0 |
|
1 0 |
0 |
0 |
1 0 0 |
b |
|
|
|||||||||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
||
0 1 0 |
0 |
|
0 |
1 0 |
by |
|
0 |
1 0 |
0 |
|
0 |
1 0 |
by |
, |
||||||||||
|
0 |
0 |
1 |
0 |
|
|
0 |
0 |
1 0 |
|
|
0 |
0 |
1 b |
|
|
0 |
0 |
1 |
b |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
z |
|
||
|
0 |
0 |
0 1 |
|
|
0 |
0 |
0 1 |
|
|
0 |
0 |
0 1 |
|
|
0 |
0 |
0 1 |
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
где величины bx, by, bz по существу является координатами точки начала приводимой системы координат в системе координат, к которой приводят (далее это
27
будет рассмотрено на конкретных примерах).
Теперь перейдем к математическому описанию углового смещения вокруг какой-либо из координатных осей. Пусть в пространстве введены две ортогональные декартовы системы координат xyz и x’y'z' с совпадающими точками начал О и О' соответственно. При этом система xyz повернута на некоторый угол
α:
1)вокруг оси Ох (рис. 2.8, а);
2)вокруг оси Оу (рис. 2.9, а);
3)вокруг оси Oz (рис. 2.10, а).
Выразим координаты произвольной точки А в системе координат x'y'z' через координаты ее в системе xyz.
Для всех трех рассматриваемых случаев в силу совпадения точек начал систем координат имеем:
O'O 0 x' |
0 y' |
0 z ' |
|
|
|
ОA xA x |
yA y |
zA z, |
|
|
|
|
|
|
|
|
|
О' A О'O OA x' A x' y' |
A y' z' |
A z ' |
xA x |
yA y |
zA z |
|||
|
|
|
|
|
|
|
|
|
' |
' |
Однако представление векторов |
xA x, yA y, zA z в базисе векторов |
|||||
' |
во всех трех случаях будут различными: |
|
|
|||||
x |
, y |
, z |
|
|
||||
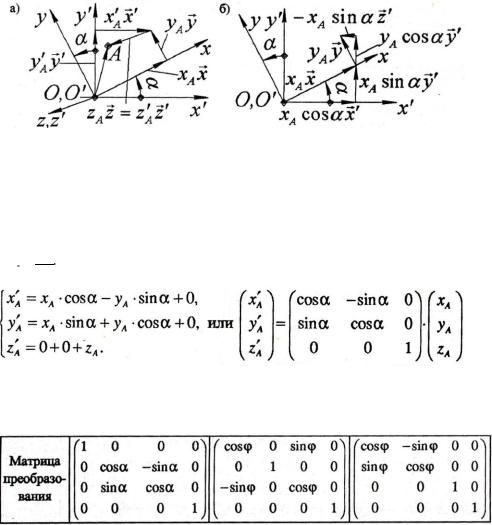
1) при повороте вокруг оси Ох (рис.2.8, б):
Рис.2.8 Угловые смещения систем координат относительно друг друга вокруг оси х: а- векторное представление координат точки; б - преобразование векторов.
28

x |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
x' 0 y' 0 z |
' |
|
|
|
|
|
|
|
||||||||
|
A |
|
|
A |
' |
yA |
|
|
' |
|
' |
|
|
|
|
|
|
yA y |
0 x |
|
cos y |
|
yA sin z |
|
, |
|
|
|
|
|
|||||
|
|
|
|
' |
zA |
|
' |
|
' |
|
|
|
|
|
|
|
|
zA z |
0 x |
|
sin y |
|
zA cos z |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя полученные зависимости в выражение, получим |
|
|
|||||||||||||||
|
|
' |
A (xA 0 |
' |
(0 |
|
|
|
|
' |
(0 |
yA |
sin zA |
' |
|||
ОA О |
0)x |
yA cos zA sin ) y |
|
cos )z |
|||||||||||||
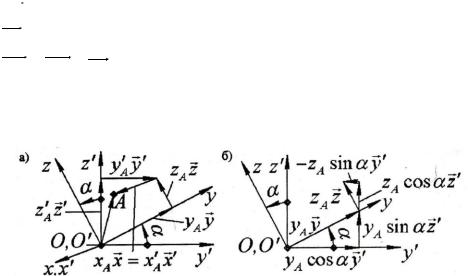
2) при повороте вокруг оси Оу (рис.2.9, б):
Рис. 2.9. угловые смещения систем координат относительно друг друга вокруг оси y: а – векторное представление координат точки; б – преобразование векторов.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xA x |
xA cos x' |
0 y' |
xA sin z |
' |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yA y |
0 x' yA |
y |
' 0 z |
' |
|
|
|
, |
|
|
|
|
|||||
z |
|
|
z |
|
|
|
|
z |
|
|
|
|
|
|
|
||
|
z |
|
sin x' 0 y' |
|
cos z |
' |
|
|
|
|
|||||||
|
A |
|
|
|
А |
|
|
|
|
A |
|
|
|
|
|
|
|
Подставляя полученные зависимости в выражение, получим |
|
|
|||||||||||||||
|
|
|
' |
A |
(xA cos 0 zA |
|
|
' |
|
|
' |
( xA |
sin 0 zA |
' |
|||
ОA О |
sin )x |
(0 yA 0) y |
|
cos )z |
|||||||||||||
29
3) при повороте вокруг оси Оz (рис.2.10, б):
Рис. 2.10. Угловые смещения систем координат относительно друг друга вокруг оси z: a- векторное представление координат точки; б – преобразование векторов.
|
|
|
|
|
|
|
|
|
|
xA x |
xA cos x |
' |
xA sin y |
' |
0 z |
' |
|
||
|
|
|
|
|
|
|
|
||
yA y yA sin x |
' yA cos y |
' 0 z |
' |
||||||
|
|
' |
' |
|
' |
|
|
|
|
|
zA z |
0 x |
0 y |
zA z |
|
|
|
|
|
Подставляя полученные зависимости в выражение, получим
' |
' |
' |
' |
ОA О |
A (xA cos yA sin 0)x |
(xA sin yA cos 0) y |
(0 0 zA )z |
Расширенные матрицы перехода приведены в табл. 2.2.
Таблица 2.2 Расширенные матрицы преобразования координат для учета
угловых смещений
Таким образом, в табл. 2.1 и 2.2 приведены шесть матриц преобразования, которые реализуют принцип шести степеней свободы. Следует отметить, что матрицы угловых смещений в общем случае между собой не коммутируют, однако они коммутируют с матрицами линейных смещений. Отвлекаясь от математики, вышеска-
30