

Роботы
.pdfв которых используются кинематические пары V класса (реже IV класса).
1.4. Краткие сведения из теории матриц
Матрицей называется прямоугольная таблица чисел:
а11 |
а12 |
а1n |
|
|||
|
|
|
|
|
|
|
a21 |
a22 |
a2n |
(1.3) |
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
||
|
|
am2 |
|
|
|
|
am1 |
amn |
|
||||
В общем случае матрица называется прямоугольной (с размерами m x n) или m x n-матрицей. Если m = n, то матрица называется квадратной, а число m, равное n, – ее порядком. Числа, составляющие матрицу, называются ее элементами.
При двухиндексном обозначении элементов первый индекс всегда указывает номер стоки, а второй индекс – номер столбца, на котором стоит данный элемент.
Матрицу можно обозначать таблицей, как это сделано в (1.3), однако допускается обозначение одной буквой, например матрица А.
Прямоугольная матрица, состоящая из одного столбца, называется столбцевой:
Прямоугольная матрица, состоящая из одной строки, называется строчной:
К основным операциям над матрицами относятся: сложение матриц, умножение матрицы на число и умножение матриц.
Суммой двух прямоугольных матриц А и В одинаковых размеров m x n назы-
вается матрица С тех же размеров, элементы которой равны суммам соответствующих элементов данных матриц:
C=A+B,
если
сik aik bik (i 1,2,..., m;k 1,2,..., n)
Операция нахождения суммы данных матриц называется сложением матриц. Свойства операции:
-переместительное: A+B=B+A
-сочетательное: (A+B)+C=A+(B+C)
Произведением матрицы А на число α называется матрица С, элементы кото-
рой получаются из соответствующих элементов матрицы А умножением на число α:
С= αА,
если
сik aik (i 1,2,..., m; k 1,2,..., n)
11

Операция нахождения произведения матрицы на число называется умножением матрицы на число.
Таким образом, разность A - B двух прямоугольных матриц одинаковых размеров определяется равенством
A - B=A + (-1)·B.
Произведением двух прямоугольных матриц
называется матрица
у которой элемент cij, стоящий на пересечении i-й строки и j-го столбца, равен «произведению» i-й строки первой матрицы А на j-й столбец второй матрицы В:
n
сik aik bkj (i 1,2,..., m; k 1,2,..., q)
k 1
Операция нахождения произведения данных матриц называется умножением матриц.
Пример:
Необходимо помнить, что операция умножения двух матриц выполнима лишь в том случае, когда число столбцов в первом сомножителе равно числу строк во втором.
В частности умножение всегда выполнимо, если оба сомножителя квадратные матрицы одного и того же порядка. Следует отметить, что даже в этом частном случае умножение матриц не обладает переместительным свойством, т.е. AB≠BA. Так, например
Если AB= BA, то матрицы А и В называются перестановочными или ком-
мутирующими между собой.
Умножение матриц обладает сочетательным свойством умножения и распределительным свойством умножения относительно сложения:
12
(AB)C = A(BC), (A + B)C = AC + BC , A(B + C)=AB + AC.
Кроме этого, следует отметить еще одну важную операцию - транспонирование. Если A = (aik) (i = 1, 2,..., m;k = 1, 2,..., n), то транспонированная матрица А’ определяется
равенством A' (aki' ) , где aki' aki (i=1, 2,..., m;k = 1, 2,..., n). Если матрица А имеет размеры m x n, то матрица А ’ имеет размеры n x m. Другими словами, операция транспо-
нирования заменяет строки исходной матрицы столбцами. Обозначается операция при помощи символа «Т», проставленного как степень:
A' AТ
2.Создание алгоритма решения прямой задачи
оположениях
Врамках данного раздела рассмотрим ход решения прямой задачи о положениях пространственного манипулятора, начиная с определения числа степеней подвижности, а, следовательно, и числа обобщенных координат, необходимого для исчерпывающего описания кинематической цепи манипулятора, и заканчивая матричными преобразованиями собственных систем координат отдельных звеньев его кинематической цепи. Рассмотрение будет производиться на примере конкретных кинематических структур манипуляторов промышленных роботов.
2.1.Определение числа степеней подвижности
2.1.1.Определение числа степеней подвижности для пространствен-
ной кинематической структуры манипулятора
Число степеней свободы W, которым обладает кинематическая цепь, относительно звена, принятого за неподвижное, вычисляется по следующей формуле
W=6·n-5·p5 -4·p4 -3·p3 -2·p2 -1·p 1, (2.1)
где n - число подвижных звеньев, р1–5 - число пар I, II, III, IV и V класса соответственно. Смысл формулы заключается в следующем: каждое из n подвижных звеньев, будучи несвязанным, имеет 6 степеней свободы, поэтому максимальным пределом числа
степеней свободы для кинематической цепи является число 6 n. Однако наличие в кинематической цепи пар V класса отнимает некоторое количество степеней подвижности. Необходимо отметить, что каждая из пар V класса отнимает 5 степеней, а p5 пар отнимают 5· p5 степеней свободы. Распространяя подобные доводы и на кинематические пары остальных классов, получаем зависимость (2.1).
Формула (2.1) впервые, в несколько ином виде, была дана П.И. Сомовым в 1887г. и развита А.П. Малышевым в 1923 г. и носит название формулы Сомова-Малышева.
13
2.1.2.Определение числа степеней подвижности для кинематической структуры манипулятора ПР модели М20П.40.01
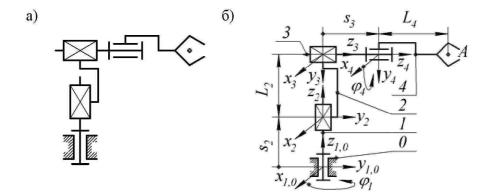
Кинематическая структура манипулятора данного ПР представлена на рис. 2.1
Рис. 2.1. Кинематическая структура манипулятора ПР модели М20П.40.01
После нумерации звеньев структуры в соответствии с принципами, указанными в п. 2.1.1, выясняется, что 4 подвижных звена соединены четырьмя одноподвижными парами (V класс), из которых 2 вращательные и 2 поступательные. Число степеней подвижности кинематической цепи манипулятора ПР согласно формуле (2.1) составляет
W= 6 · n - 5 · p 5 - 4 · p 4 - 3 · p 3 - 2 · p 2 - 1 · p 1 = 6 · 4 - 5 · 4 - 4 · 0 - 3 · 0 - 2 · 0 - 1 · 0 = 4
Учитывая необходимость равенства числа степеней подвижности и числа обобщенных координат, для решения прямой задачи о положениях должны быть заданы девять обобщенных координат.
Следовательно, и число обобщенных координат также равно четырем.
2.1.3.Определение числа степеней подвижности для кинематической структуры манипулятора ПР модели М10П.62.01
Кинематическая структура манипулятора данного ПР представлена на рис 2.2.
Рис. 2.2. Кинематическая структура манипулятора ПР модели М10П.62.01 14
Пронумеруем звенья структуры в соответствии с принципами, указанными в п. 2.1.1. После этого выясняется, что 4 подвижных звена соединены четырьмя одноподвижными парами (V класс), из которых 3 вращательные и одна поступательная. Число степеней подвижности кинематической цепи манипулятора ПР согласно формуле (2.1) составляет
W= 6 · n - 5 · p 5 - 4 · p 4 - 3 · p 3 - 2 · p 2 - 1 · p 1 = 6 · 4 - 5 · 4 - 4 · 0 - 3 · 0 - 2 · 0 - 1 · 0 = 4
Следовательно, и число обобщенных координат также равно четырем.
2.1.4. Определение числа степеней подвижности для кинематической структуры манипулятора ПР
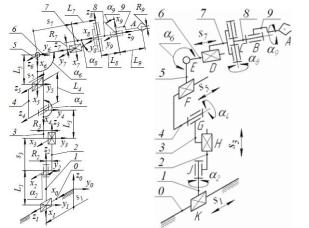
Рассмотрим манипулятор ПР, имеющий следующую кинематическую структуру, изображенную на рис.2.3.
Рис. 2.3. Кинематическая структура манипулятора промышленного робота
Пронумеруем звенья данной кинематической структуры в порядке возрастания, начиная с неподвижного звена (стойки), имеющего номер 0.
Девять подвижных звеньев соединены девятью одноподвижными парами (кинематическими парами V класса), из которых пять вращательных и четыре поступательные. Число степеней подвижности кинематической цепи манипулятора ПР согласно формуле (2.1) составляет
W=6·n-5·p5 -4·p4 -3·p3 -2·p2 -1·p1 =6·9-5·9-4·0-3·0-2·0-1·0 = 9.
Следует отметить, что данная кинематическая структура имеет сравнительно большое число степеней подвижности, что позволяет говорить как о ее плюсах, так и о ее минусах. К достоинствам следует отнести немалую маневренность (3 степени подвижности), возможность реализации рабочей зоны большого объема и, как следствие,
15

большая универсальность. В качестве недостатков можно отметить сравнительно меньшие точности позиционирования и отработки траектории, вызванные накоплением погрешностей в каждой из пар.
Последнее, о чем хотелось бы сказать, это то, что данная кинематическая структура манипулятора приведена как абстрактный пример решения прямой задачи о положениях, следовательно, она не обязательно применяется в ПР существующих конструкций.
2.2.Назначение собственных систем координат.
2.2.1.Общие принципы назначения собственных систем координат
Как уже упоминалось во введении, совмещение осей координат с характерными признаками звена во многом облегчает решение прямой задачи о положениях. В общем случае можно ориентировать оси произвольным образом, однако это существенно затруднит понимание алгоритма решения задачи и во многих случаях увеличит объем вычислительной работы. Следствием этого станет увеличение времени работы алгоритма, реализованного на ЭВМ. Особенно заметным этот фактор станет при расчете сравнительно сложной кинематической структуры.
Рекомендуется при назначении собственных систем координат руководствоваться следующими принципами:
–ось z направлять вдоль оси вращения во вращательных кинематических парах или вдоль направления поступательного перемещения в поступательных парах;
–ось х или у совмещать с осевой линией звена либо направлять перпендикулярно ей, в некоторых случаях (например, при описании ротации) бывает уместным совместить координатный вектор с плоскостью, образованной соседними звеньями;
–оставшуюся ось следует направлять таким образом, чтобы в общем получалась правосторонняя система координат.1
Однако для решения поставленной задачи допускается использовать и левостороннюю систему координат. Не рекомендуется в рамках решения одной задачи допускать комбинированное использование указанных систем, поскольку отход от однообразия повышает вероятность возникновения ошибок и затрудняет их поиск.
Также при назначении собственных систем координат отдельных звеньев рекомендуется стремиться к тому, чтобы оси хотя бы одной из трех пар одноименных координатных векторов соседних систем были параллельны друг другу или совпадали, поскольку это порой может упростить переход между соседними системами координат. Однако это стремление не должно носить приоритетный характер.
Кроме этого, при назначении систем координат следует учитывать то, каким образом в рамках данной системы координат будет отсчитываться обобщенная ко-
ордината. Имеется ввиду от чего и в каком направлении она будет отсчитываться.
1 Для правосторонней системы координат справедливы следующие векторные равенст-
ва: |
|
|
|
|
|
|
|
x |
y |
z, y |
z |
x, z |
x |
y. |
16
Для иллюстрации вышесказанного наглядно рассмотрим назначение собственных систем координат на примере различных кинематических структур манипуляторов ПР.
2.2.2. Общие принципы назначения собственных систем координат при решении прямой задачи о положениях для кинематической структуры манипулятора ПР модели М20П.40.01
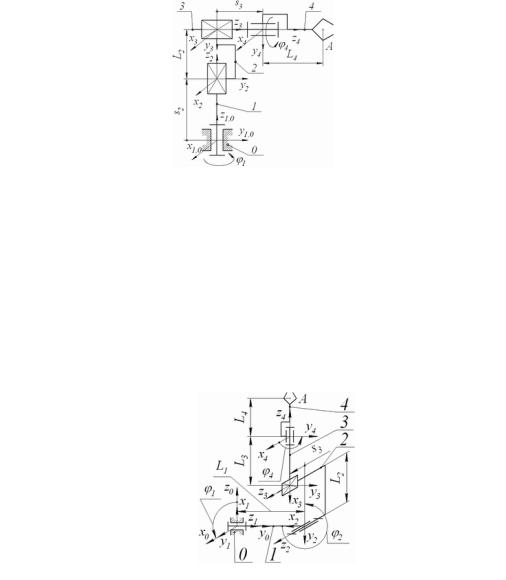
Рис.2.4. Кинематическая структура ПР модели М20П.40.01
Направления одноименных координатных осей и точки начал систем координат 0 и 1 совпадают. В системе 1 происходит описание ротации звена 1 относительно неподвижной стойки 0. При этом обобщенная координата φ1 отсчитывается от положительного направления оси х1 до положительного направления оси х2. Таким образом, в приложении 2 кинематическая структура изображена в том положении, когда φ1 = 0o . Также в этой системе происходит учет поступательного перемещения s2, которое влияет на высоту расположения руки робота.
Оси системы 2, начинающейся в поступательной кинематической паре, направлены следующим образом: z2 ориентирована вдоль направления поступательного перемещения звена 2 относительно звена 1; у2 лежит в плоскости звена 2, а ось х2 совпадает с вектором нормали к указанной плоскости и замыкает правую тройку векторов.
В системе 3 происходит описание выдвижения руки с помощью обобщенной координаты s3. При этом ось z3 сонаправлена с поступательным перемещением звена 3 относительно звена 2; ось х3 совпадает с направлением координатного вектора х2; вектор у3 ориентирован вертикально вниз.
Ротация звена 4 относительно звена 3 описывается с помощью обобщенной координаты φ4. Если учесть, что одноименные оси системы 4 и системы 3 сона-
17
правлены и угол φ4 отсчитывается от положительного направления оси х в направлении оси у (другими словами, если смотреть с положительного направления оси z4, то угол, отсчитываемый против часовой стрелки, будет положительным), то в приложении 3 дано изображение структуры при φ4=-90o (или φ4=270o).
2.2.3. Назначение собственных систем координат при решении прямой задачи о положениях для кинематической структуры манипулятора ПР модели М10П.62.01
Кинематическая структура промышленного робота модели М10П.62.01 состоит из 4х подвижных звеньев, соединенных 4мя кинематическими парами, в каждой из которых начинается локальная система координат.
В первой кинематической паре рис (2.2), обеспечивающей ротацию звена 1 относительно стойки 0, начинаются системы 1 и 0. Неподвижная система 0 связана со стойкой и имеет следующую ориентацию осей: х0 – на нас; у0 – вправо, вдоль оси ротации; z0 – вертикально вверх.
Система 1 также жестко связана со стойкой, в ней производится учет ротации звена 1 с помощью угла φ1, отсчитываемого от положительного направления оси x1 до положительного направления оси z2. При этом ось z1 направлена по оси кинематической пары; х1 – сонаправлена с осью х0; у1-вертикально вниз. Таким образом на рис.2.2 приведено положение манипулятора ПР при φ1=0.
Система 2 жестко связана со звеном 1 и начинается в точке D. При этом ось z2 направлена по оси кинематической пары (в данном случае горизонтально на нас); х2 – горизонтально по звену 1; у2 – дополняет правую тройку векторов. В рамках этой системы координат производится учет качания звена 2 относительно звена 1 с помощью обобщенной координаты s3 в данной системе происходит учет линейного смещения точки С вдоль оси z2.
Система 3 берет начало в точке С и имеет следующую ориентацию осей: z3 направлена вдоль поступательного перемещения в третьей кинематической паре и сонаправлена с z2; х3 – лежит в плоскости звена 2; у3 – замыкая правую тройку векторов, совпадает с нормалью к плоскости звена 2.
Система 4, начинающаяся в точке В, служит для описания ротации схвата робота (звена 4) с помощью обобщенной координаты φ4, которая отсчитывается от положительного направления оси х4 до плоскости схвата. При этом ось z4 направлена по оси кинематической пары; у4 – сонаправлена с осью у3; х4 – дополняет правостороннюю систему координат.
2.2.4. Назначение собственных систем координат при решении прямой задачи о положениях для кинематической структуры ПР
Требуется определить радиус-вектор точки схвата относительно неподвижной системы координат. Оси промежуточных (собственных) систем координат ориентированы относительно звеньев структуры и кинематических пар
18
следующим образом.
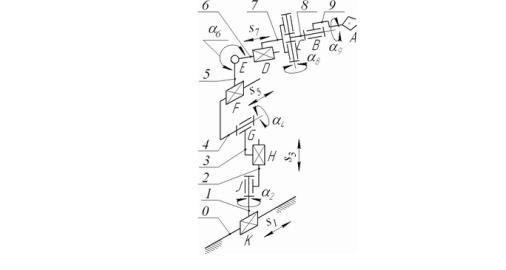
Рис.2.5. Кинематическая структура манипулятора ПР
Система 0: ось z0 неподвижной системы координат стойки направлена вертикально вверх, ось х0 – вдоль направления поступательного перемещения в первой кинематической паре, перпендикулярно плоскости листа (на нас), ось у0 направлена вправо. В этой системе координат происходит учет перемещения звена 1 относительно стойки в поступательной кинематической паре, которое описывается обобщенной координатой s1, отсчитываемой от начала системы 0 до точки K.
Система 1: начало системы координат (точка K) совпадает с поступательной кинематической парой 1 (рис. 2.5) ось z1 направлена вдоль линейного перемещения (сонаправлена с осью x0), ось у1 параллельна оси у0, ось х1 дополняет правую тройку координатных векторов, имея направление вертикально вниз. Можно заметить, что координатные вектора у0 и у1 остаются параллельными при любом допустимом значении обобщенной координаты s1.
Система 2 берет свое начало в точке J вращательной кинематической пары, соединяющей звенья 1 и 2 (рис.2.5). При этом ось z2 направлена вдоль оси этой пары вертикально вверх, ось у2 параллельна оси у1, а ось х2 – оси z1. Как можно заметить и в этом случае удалось добиться параллельности одной пары одноименных осей. В этой системе, жестко связанной со звеном 1, с помощью обобщенной координаты a2 описывается ротация звена 2 относительно звена 1, а также линейное перемещение s3 звена 3 относительно звена 2 . Причем угол a2 отсчитывается от положительного направления оси х2 до плоскости звена 2, а более конкретно – до проекции элемента R2 на плоскость x2y2. Обобщенная координата линейного характера s3 отсчитывается по вертикали от точки J до точки H .
Система 3 начинается в точке Н поступательной кинематической пары (рис.2.5). Для данной кинематической структуры в этой системе не происходит фиксирования каких-либо перемещений (линейных или угловых) обусловленных изме-
19
нением значений обобщенных координат. Однако в ней будут учитываться постоянные линейные смещения вращательной кинематической пары 4 относительно поступательной пары 3. Оси этой системы направим следующим образом: z3 – вдоль направления поступательного перемещения s3, что означает параллельность осей z3 и z2 в независимости от значения координаты α2; ось у2 направлена перпендикулярно z2 и лежит в плоскости звена 2 (направлена по элементу R2); ось х2 замыкает правую тройку векторов и совпадает с нормалью плоскости звена 2. Таким образом, при α2=90o одноименные оси систем 2 и 3 сонаправлены.
Система 4, в которой будет описываться угловое смещение a4 звена 4 относительно звена 3, имеет следующую структуру: ось z4 направлена вдоль оси вращения в кинематической паре 4 и совпадает с вектором нормали плоскости звена 3; остальные же оси лежат в указанной плоскости, причем ось х4 направлена от точки G вращательной кинематической пары по осевой линии элемента L3 звена 3, а ось у4 перпендикулярна ей. В целом образуется правая система координат и при этом опять же удалось сохранить сонаправленность осей у обеих систем (рис. 2.5).
Кроме учета угла a4 между звеньями 3 и 4, в этой системе происходит фиксирование линейного перемещения s5 точки F поступательной кинематической пары 5. Причем угловая обобщенная координата α4 отсчитывается от положительного направления оси х4 до плоскости звена 4, а линейная обобщенная координата s5 отсчитывается по горизонтали от точки G до точки F.
Система 5, начинающаяся в точке F, служит для учета фиксированного линейного смещения точки Е (рис.2.5). Ориентация осей носит следующий характер: z5 – вдоль направления поступательного перемещения s5, что означает параллельность осей z5 и z4 в независимости от значения координаты α4; ось х5 направлена перпендикулярно z5 и лежит в плоскости звена 4; ось у2 замыкает правую тройку векторов и совпадает с нормалью плоскости звена 4. Таким образом, при α4 =180o одноименные оси систем 4 и 5 будут сонаправлены.
Начало системы 6 совпадает с точкой Е вращательной кинематической пары 6 (рис.2.5), в которой с помощью обобщенной координаты a6 описывается угловое положение звена 6 относительно звена 5, а также фиксируется линейное перемещение s7 звена 7 относительно звена 6. Ось z6 направлена вдоль оси вращения пары (на нас), ось х6 – от точки Е кинематической пары по звену 5, а ось у6 – перпендикулярно к ним, образуя правую тройку координатных векторов (рис. 1). Такая ориентация осей позволила сонаправить оси у обеих систем координат.
Отсчет угла a6 происходит от положительного направления оси х6, совпадающей с осевой линией звена 5 до осевой линии звена 6. Базой для отсчета линейного перемещения s7 является точка Е, а конечным пунктом – точка D поступательной кинематической пары 7.
Оси 7 системы координат, берущей свое начало в точке D (рис.2.5), направлены следующим образом: z7 – вдоль направления поступательного перемещения s7, х7 лежит в плоскости, образованной звеньями 6 и 7, и перпендикулярна осевой линии звена 7, у7 дополняет правую тройку координатных векторов и совпадает с на-
20