

13.2 Законы движения ведомого звена
Рассмотрим механизм с поступательно движущимся толкателем (рис. 13.1,а). Закон движения (рис.13.4) может задаваться в виде перемещения толкателя S(φ), что эквивалентно S(t), так как φ=ωt , а ω=const, где S –, φ, ω – угол поворота и скорость вращения кулачка.

Рис. 13.4. Типовой график S(φ)
h - соответствует ходу толкателя
Для кулачкового механизма часто неважен закон изменения S(φ) на участках φу - подъема и φп - опускания, а важно обеспечение требуемых углов подъема и опускания.
Поэтому, закон
движения толкателя могут выбирать из
условия минимума динамических нагрузок,
возникающих при работе механизма, то
есть задаются законом движения в виде
аналога ускорений толкателя а(φ)= .
Связь между аналогом ускорения и
ускорением при постоянной скорости
вращения кулачка простая: а= а(φ)∙ω2.
.
Связь между аналогом ускорения и
ускорением при постоянной скорости
вращения кулачка простая: а= а(φ)∙ω2.
При реальном проектировании кулачкового механизма закон движения ведомого звена может быть достаточно сложным и не содержать участков, приводящих к ударам первого или второго рода. В учебном проекте графики аналогов ускорений штанги задаются достаточно простыми (рис. 5).
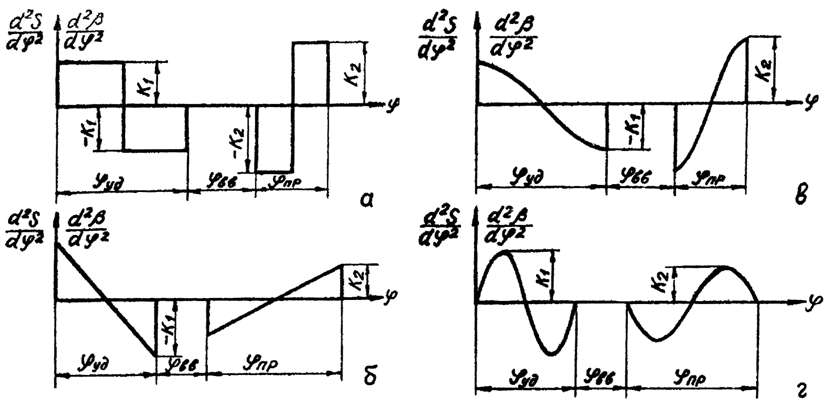
Рис. 5 Графики аналогов ускорений штанги кулачкового механизма
для учебного проекта
Угол давления в кулачковом механизме
Одним из условий проектирования кулачкового механизма является требование, чтобы максимальный угол давления γ был меньше критического, то есть γmax< γк. Критический угол давления обычно выбирается так, чтобы отсутствовало заклинивание кулачкового механизма (γк =30º…40º).
Угол давления – это угол между векторами реакции в точке соприкосновения толкателя с кулачком и скоростью толкателя.
Дано: r0, e, S.

Опр.: γ.
На рис. дана
расчетная схема а)
и план скоростей б).

Рис.6 расчетная схема а) и план скоростей б)


Из формулы угла давления следует, что этот угол можно регулировать соответствующим выбором минимального радиуса кулачка и эксцентриситета и наоборот.
В случае механизма с роликом различают действительный (практический) и центровой (теоретический) профили кулачка.
Вначале находят центровой профиль кулачка, т.е. тот профиль, который описывает центр ролика, или профиль, по которому скользил бы толкатель без ролика. Затем ножку циркуля ставят на центровой профиль и чертят много окружностей радиусом ролика: внутренняя огибающая всех этих окружностей дает действительный профиль кулачка, т.е. тот профиль, по которому обкатывается ролик.

Рис.7 Центровой и действительный профили кулачка
Чем больше радиус ролика, тем меньше потерь на трение. Максимальный радиус ролика - ограничивается условием самопересечения или заострения действительного профиля кулачка.

где ρmin – минимальный радиус кривизны центрового профиля кулачка,
r0 – минимальный радиус центрового профиля кулачка (на угле нижнего выстоя, если он есть).
14 Динамический анализ механизмов
Динамический анализ механизмов. Режимы движения. Уравнение энергетического баланса. Механический КПД. Коэффициент потерь. КПД механизмов, соединенных последовательно, параллельно, последовательно – параллельно. КПД отдельных механизмов: наклонной плоскости, планетарного редуктора.
Задачами динамического анализа являются: 1) определение законов движения механизма и его звеньев с учетом приложенных к механизму сил;
2) исследование энергетического баланса машины и определение КПД;
3) регулирование движения.