

Фбгоувпо
«Московский государственный строительный университет»
кафедра «Механическое оборудование, детали машин и технология металлов»
Конспект лекции №10 по дисциплине
«Теория механизмов и машин»
для бакалавров по направлению 270800
Москва 2013-10-30
13 Синтез кулачковых механизмов
Кулачковые механизмы. Основная терминология. Законы движения Угол давления на ведомое звено и его выбор. Определение основных размеров кулачкового механизма с толкателем и коромыслом.
13.1 Терминология и классификация
кулачковых механизмов
|
Кулачковым называется механизм, в состав которого входит кулачок. Кулачком называется элемент высшей кинематической пары с переменным радиусом кривизны рабочей поверхности. |
В кулачковых механизмах (рис. 13.1) ведущим звеном является вращательно или поступательно движущийся кулачок-1, а ведомым – штанга, которую называют толкателем-2, если она совершает возвратно-поступательное движение, или коромысло-3, если качательное.
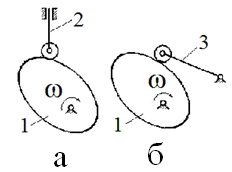
Рис. 13.1. Примеры схем кулачковых механизмов:
а – с толкателем и роликом, в – с коромыслом и роликом
Кулачковые механизмы служат для автоматизации технологических процессов и предназначены для обеспечения заданного закона движения ведомого звена.
Кулачковые механизмы классифицируются (рис. 13.2):
-по типу ведомых звеньев - с роликовым, заостренным или плоским толкателем или коромыслом;
-по характеру замыкания высшей пары - силовое или кинематическое (силовое, если штанга прижимается к кулачку под действием силы тяжести или пружины; кинематическое, если под действием направляющей);
-по характеру относительного движения звеньев – плоские и пространственные.
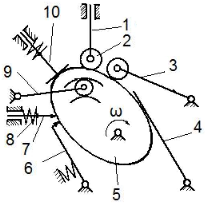
Рис. 13.2. Кулачок с разными типами ведомых звеньев: 1- толкатель с роликом; 2 – ролик; 3 - коромысло с роликом; 4 - коромысло, касающееся кулачка; 5 – кулачок; 6 - коромысло с остриём на конце; 7 - толкатель с остриём на конце; 8 – пружина; 9- коромысло с роликом и кинематическим замыканием; 10 - плоский (тарельчатый) толкатель (в схемах 1, 3, 4, 6, 7, 8 и 10- силовое замыкание кинематической цепи).
На рис. 13.2 лишь условно показаны с одним кулачком разного типа штанги.
Если ось толкателя проходит через ось кулачка, то механизм называется центральным; в противном случае – нецентральным (рис. 13.3). Расстояние «е» между осью толкателя и осью кулачка называется эксцентриситетом.
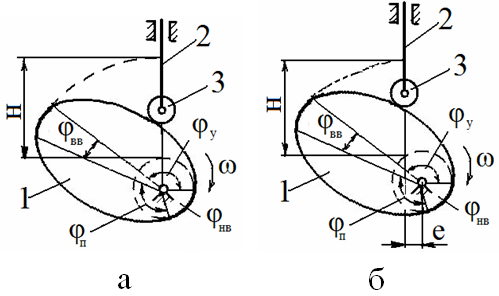
Рис. 13.3 Схема кулачкового механизма с толкателем
а) центральный; б) нецентральный
При вращении кулачка в общем случае возникает четыре фазы движения толкателя или коромысла: фаза удаления толкателя на угле поворота кулачка φу; фаза верхнего выстоя на угле поворота φвв; фаза опускания или приближения на угле поворота φп и фаза нижнего выстоя на угле поворота φнв. На фазе верхнего или нижнего выстоя кулачок вращается, а толкатель стоит на месте. На рис. 3, кроме того, обозначено: 1—кулачок, 2—толкатель, 3—ролик, Н—ход толкателя (расстояние между его двумя крайними положениями).
Сумма фазовых углов поворота кулачка равна 2π:
φу + φвв+ φп+ φнв=2π,
где φу - угол удаления (подъёма) толкателя, φвв - угол верхнего выстоя, φп - угол приближения (опускания), φнв - угол нижнего выстоя.
Сумму трех первых углов называют углом рабочего профиля кулачка: φу + φвв+ φп=δраб. В частных случаях выстоев толкателя может и не быть.
Схему кулачкового механизма выбирают при его проектировании из конструктивных, соображений а закон движения ведомого звена – из технологических.