

6. Описание функциональной схемы сау
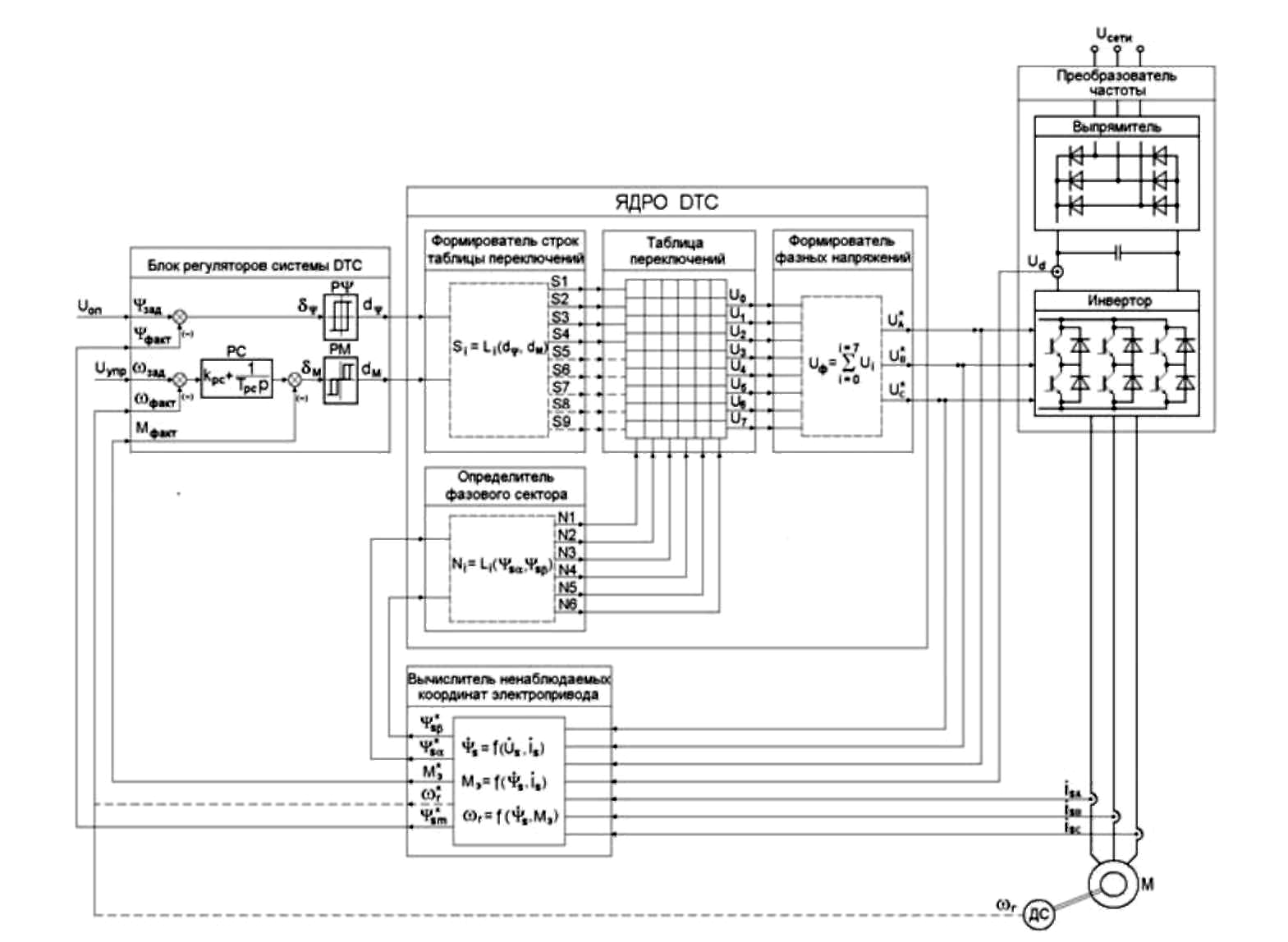
Рис.3 Функциональная схема DTC
Система DTC включает в себя следующие функциональные
блок регуляторов системы DTC;
блок формирования строк таблицы переключений;
блок определения фазового сектора;
блок, реализующий таблицу переключений;
блок формирования фазных напряжений;
блок вычисления ненаблюдаемых координат привода.
Эти блоки целесообразно представить в виде субсистем при формировании математической модели электропривода в целом.
Блок регуляторов в системах прямого управления моментом содержит дискретную часть. Дискретная часть блока регуляторов построена на основе регуляторов релейного вида.
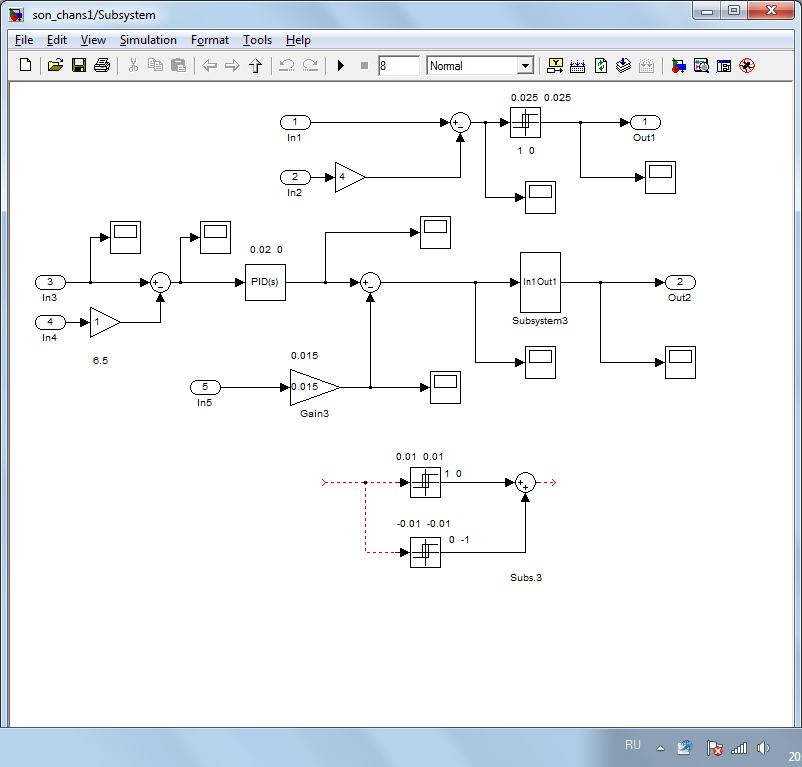
Рис.4 Блок регуляторов
Таблица переключений в системе DTC является основным функциональным блоком, формирующим алгоритм управления системой в целом. Количество строк в таблице определяется возможным числом сочетаний устойчивых состояний принятых релейных регуляторов с гистерезисной характеристикой и с зоной нечувствительности. В простейшем случае, когда в качестве регуляторов потокосцепления статора и электромагнитного момента двигателя выбраны двухпозиционные релейные элементы, количество строк таблицы равно четырем. Состояния релейных регуляторов определяются их коммутационными функциями.
В наиболее употребительном и чаще всего встречающемся в публикациях варианте таблицы переключений используются двухпозиционный релейный регулятор потокосцепления и трехпозиционный релейный регулятор электромагнитного момента двигателя. В этом случае таблица переключений содержит шесть строк, причем строки, соответствующие среднему, нулевому состоянию релейного регулятора электромагнитного момента - пассивны. Под пассивным состоянием таблицы переключений здесь и далее понимается такая комбинация управляющих сигналов с выхода таблицы переключений, при которой результирующий вектор выходного напряжения преобразователя частоты принимает одно из двух нулевых значений. Нулевые значения результирующего вектора выходного напряжения преобразователя частоты Uo и U7 соответствуют закрытому состоянию силовых электронных ключей анодной или катодной группы, соответственно.
В пассивном положении система DTC ожидает следующего шага и, в зависимости от нового состояния релейного регулятора электромагнитного момента, формирует тот или иной пространственный вектор выходного напряжения. Благодаря этому снижается частота пульсаций электромагнитного момента вокруг среднего значения и повышается устойчивость работы системы DTC.
Структурная схема, реализующая эту таблицу переключений, приведена на рис.7
|
Состояние релейных регуляторов |
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |


















































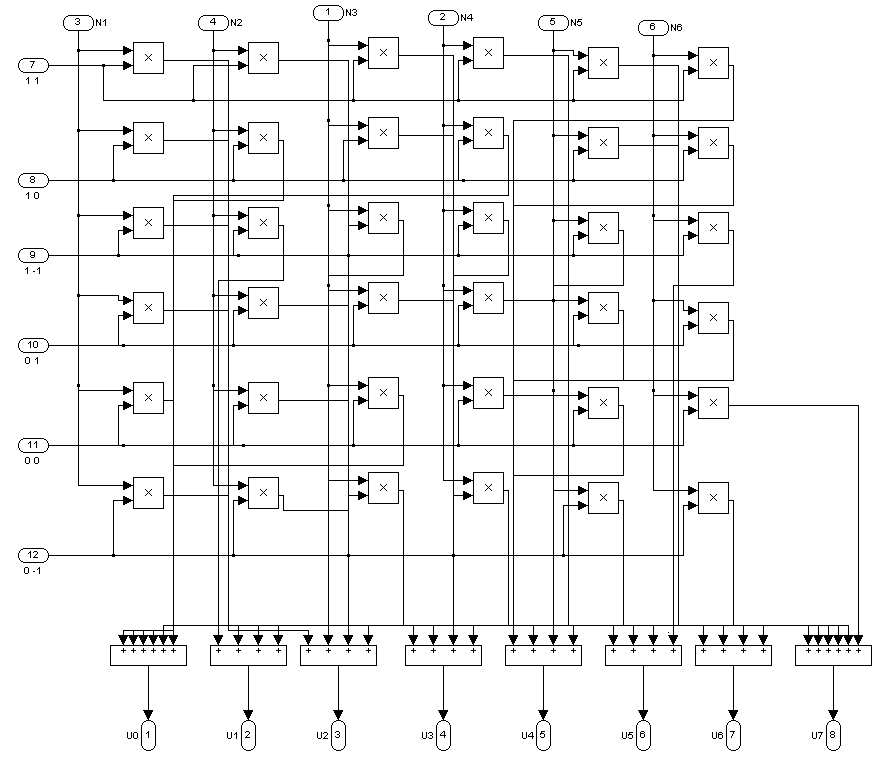
Рис.5 Структурная схема таблицы переключений.
Формирователь строк таблицы переключений преобразует выходные сигналы релейных регуляторов потокосцепления статора и электромагнитного момента двигателя в переключательные функции, соответствующие номерам строк таблицы переключений. Таблица переключений силовых электронных ключей может содержать разное количество строк, причем состав таблицы выбирается предварительно, до начала построения системы. Следовательно, для каждого варианта таблицы переключений должен существовать свой формирователь строк. Или же может быть использован универсальный формирователь строк, построенный для таблицы переключений, содержащей 9 строк. Тогда для таблицы переключений, содержащей меньшее количество строк, ряд входов и выходов этой субсистемы просто не используется.
Формирователь строк таблицы переключений - это набор схем совпадений, входами которых являются выходные сигналы релейных регуляторов потокосцепления статора и электромагнитного момента двигателя.
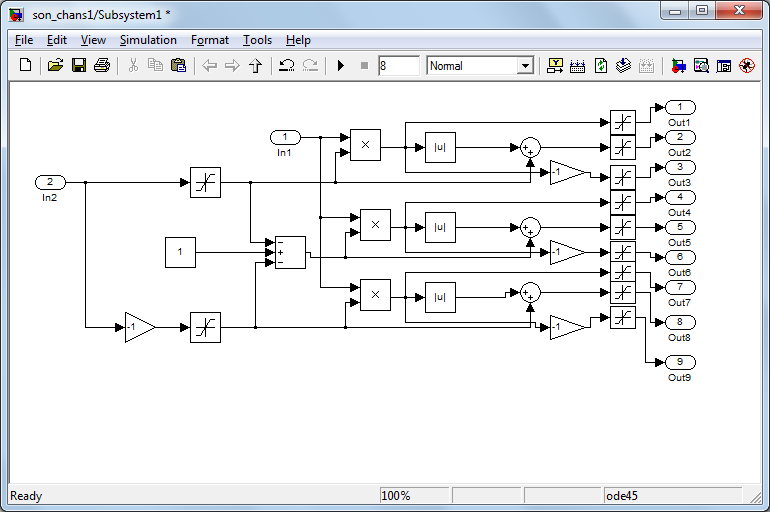
Рис.6 Формирователь строк
Исходными данными для вычислений, проводимых в вычислителе ненаблюдаемых координат электропривода, являются фазные напряжения на выходе автономного инвертора и фазные токи статора двигателя. Первоначально трехфазные токи и напряжения следует преобразовать в систему координат (α-β).
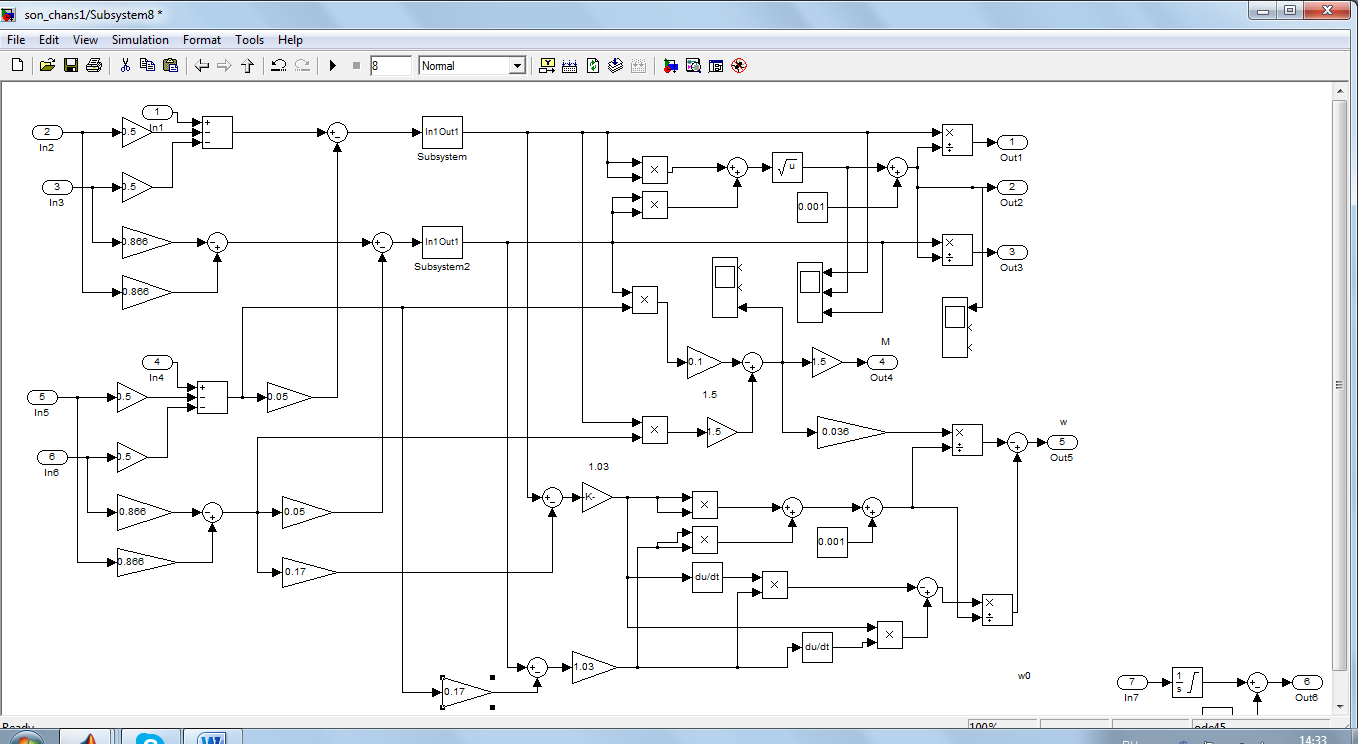
Рис.8 Вычислитель ненаблюдаемых координат
Для успешной работы системы DTC определитель фазового сектора должен с возможно большей точностью фиксировать момент перехода вектора потокосцепления статора из одного сектора в другой.
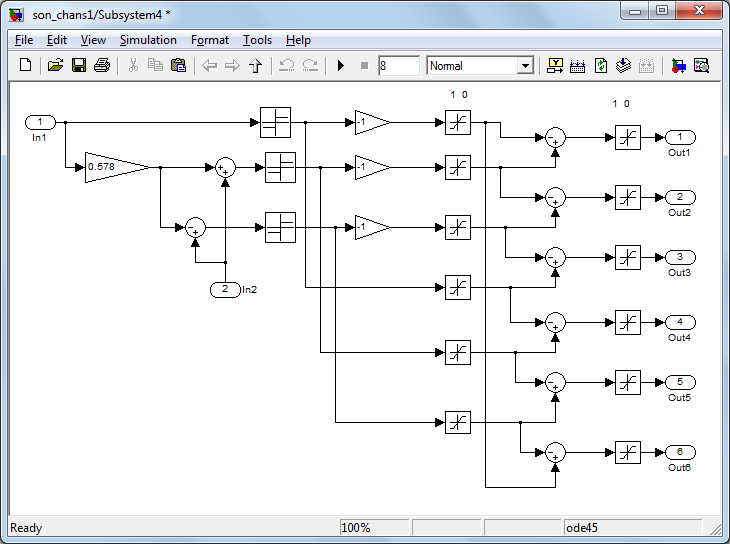
Рис.7 Определитель фазового сектора