

3. Расчет и построение математической модели двигателя
3.1. Взаимная индуктивность, Гн
3.2. Индуктивность рассеяния, Гн

3.3. Индуктивность обмотки статора и ротора, Гн

3.4. Сопротивление ротора, Ом

3.5. Индуктивности статора и ротора, Гн


3.6. Расчет параметров математической модели


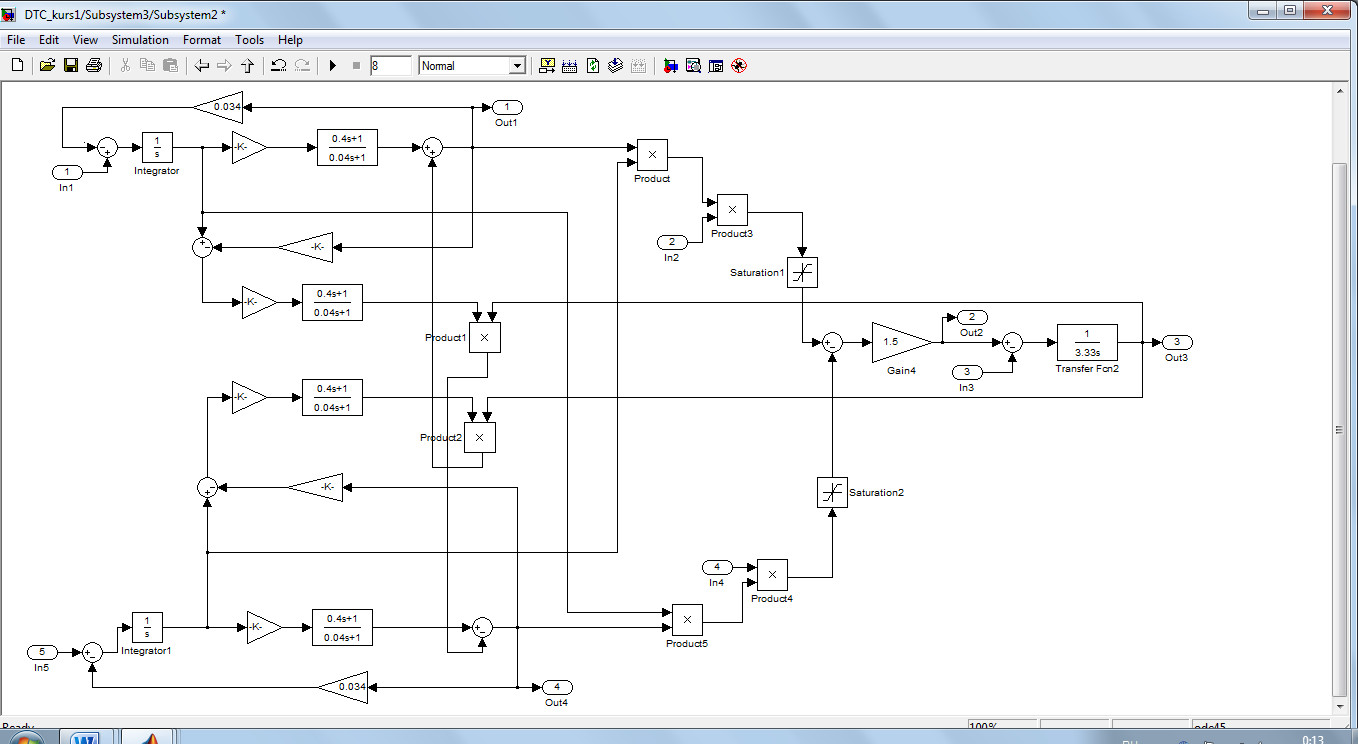
Рис.2 Структурная схема АД в статорных координатах
4. Выбор преобразователя частоты Для управления электродвигателем применяем частотный преобразователь Combarco марки cv-7200gs-300k-ip00
Параметры
Параметры
|
Диапазон входного напряжения, В |
220-380 |
|
Частота, Гц |
0,1 … 400 Гц |
|
Номинальная мощность двигателя, кВт |
315 |
|
Максимальный выходной ток, А |
700 A |
|
Число входных фаз |
3 - AC |
|
Номинальный ток, А |
600 A |
Рабочий диапазон температур -10 …+40 оС
Встроенный источник питания 24В, 50мА
Встроенный сетевой фильтр
ПИД-регулятор
Торможение постоянным током
Многофункциональные аналоговые и дискретные входы и выходы
Управление по сети RS-485, MODBUS, PROFIBUS (опция)
5. Выбор и описание системы управления электроприводом.
Трудности синтеза САУ асинхронного двигателя (АД) связано с чрезвычайной сложностью АД как объекта регулирования. Он является многоканальным объектом регулирования с большим количеством перекрестных связей между каналами.
Синтез САУ АД предполагает использование полных дифференциальных уравнений АД, полученных на основе теории обобщенной электрической машины. При этом большое значение имеет рациональный выбор переменных, относительно которых синтезируется САУ, и рациональное ориентирование выбранных переменных. Это дает возможность в ряде случаев существенно упростить задачу синтеза.
Для управления АД применяют несколько видов:
1. Скалярное управление.
2. Векторное управление.
3. Прямое управление моментом.
Недостатком скалярного и векторного управления являются большой объем вычислений при прямом и обратном взаимном преобразовании неподвижной и вращающейся систем координат, а также наличие запаздывания в формировании электромагнитного момента. Для устранения этих недостатков были предложены алгоритмы прямого управления моментом, которые отличает отсутствие необходимости выполнения преобразований координат и настройки регулирования токовых контуров, робастность по отношению к неопределенности параметров, высокое быстродействие по электромагнитному моменту, минимизация обратных связей, минимальная частота коммутации силовых ключей. Недостатком является наличие пульсаций в электромагнитном моменте и потокосцеплении, что снижает точность регулирования, повышает электропотребление и увеличивает акустический шум АД. Это ставит новые проблемы в разработке алгоритмов управления, решению которых в настоящее время посвящено множество трудов.
Впервые способ прямого управления моментом был предложен в 1986 году японскими исследователями Такахаши и Ногучи и в 1988 году германским исследователем Депенброк. В Японии метод получил название «Прямое управление потоком рассеяния», в Германии – «Прямой самоконтроль». Позже метод получил название «Прямое управление моментом» (Direct Torque Control - DTC), которое стало общепринятым. Суть метода заключается в непосредственной коммутации векторов напряжения в функции от определенных косвенным путем значений электромагнитного момента и вектора потокосцепления статора. Основным недостатком первоначально предложенного метода является неточность оценки потокосцепления при отсутствии датчика скорости вращения вала. Данный эффект особенно заметен в районе малых скоростей, когда велико влияние погрешностей измерения и, особенно, неточность определения текущего активного сопротивления статора. Первая промышленная реализация метода состоялась в 1995 году, когда фирмой АВВ был представлен инвертор для управления двигателями переменного тока.
В настоящее время исследованию этих систем уделяется большое внимание во многих странах, о чем можно судить по количеству публикаций на эту тему, появившихся на страницах технической периодики. Самым известным примером практической реализации систем DTC является ряд комплектных электроприводов типа ACS-600, ACS-800 и ACS-1000, выпущенных на мировой рынок фирмой АВВ. Электропривод с системой DTC отрабатывает стопроцентный скачек задания момента за 1 - 2 мс, обеспечивает регулирование момента при низких частотах вращения, включая и нулевую, а также обеспечивает точность поддержания скорости на уровне 10% скольжения асинхронного двигателя без использования датчика скорости и 0,01% - с использованием датчика скорости.
Характерными признаками системы DTC являются:
наличие в системе релейных гистерезисных регуляторов магнитного потока статора и электромагнитного момента двигателя;
наличие в системе электронной модели двигателя для вычисления ненаблюдаемых координат (потокосцепления статора двигателя, электромагнитного момента двигателя, а также частоты вращения ротора двигателя для бездатчиковых систем;
наличие табличного (матричного) вычислителя оптимального вектора напряжения преобразователя частоты;
наличие идентификатора фазового сектора, в котором в текущий момент времени находится вектор потокосцепления статора;
отсутствие в системе преобразователей координат;
отсутствие в явно выраженной форме регуляторов составляющих тока статора двигателя;
отсутствие широтно-импульсной модуляции выходного напряжения преобразователя частоты.
В настоящее время частотно-регулируемые электроприводы переменного тока начинают вытеснять традиционные электроприводы постоянного тока.
Перечисленные динамические свойства систем прямого управления моментом делают их как нельзя более подходящими для широкого класса горных машин. Для многих из них характерны существенные колебания момента нагрузки, поэтому высокое быстродействие в сочетании с большой перегрузочной способностью являются важными факторами при выборе той или иной системы управления электроприводом.
Таким образом, системы прямого управления моментом частотно-регулируемым электроприводом переменного тока, благодаря высоким динамическим свойствам в сочетании с относительной простотой алгоритма, становятся одной из перспективных систем управления при создании электроприводов машин, механизмов и технологических комплексов в горной промышленности.