

Решение
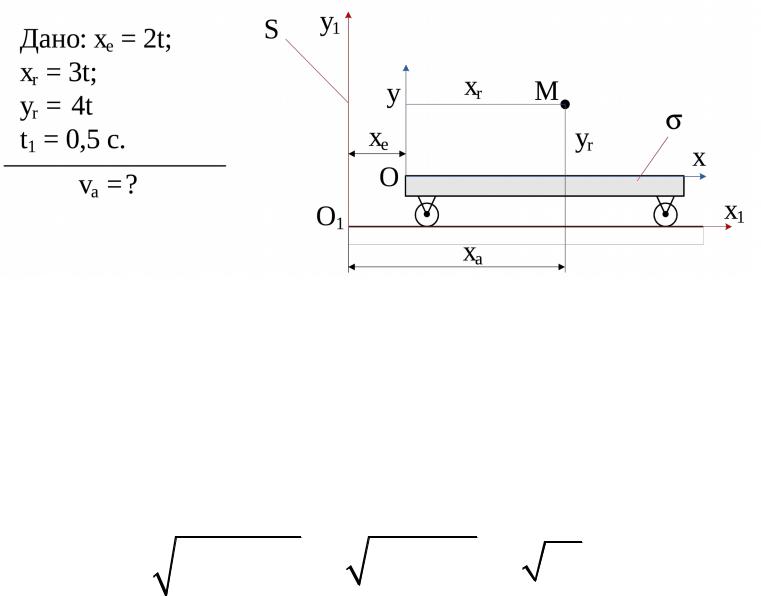
va =vr +ve ; |
vay =vry +vey ; vrx = |
dx |
vry = |
dyr |
=4; |
||||||
vax =vrx +vex ; |
|||||||||||
|
r |
=3; |
|
||||||||
|
dt |
||||||||||
|
|
||||||||||
vex = |
dxe |
=2; |
vey =0; |
|
dt |
|
|
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
dt |
|
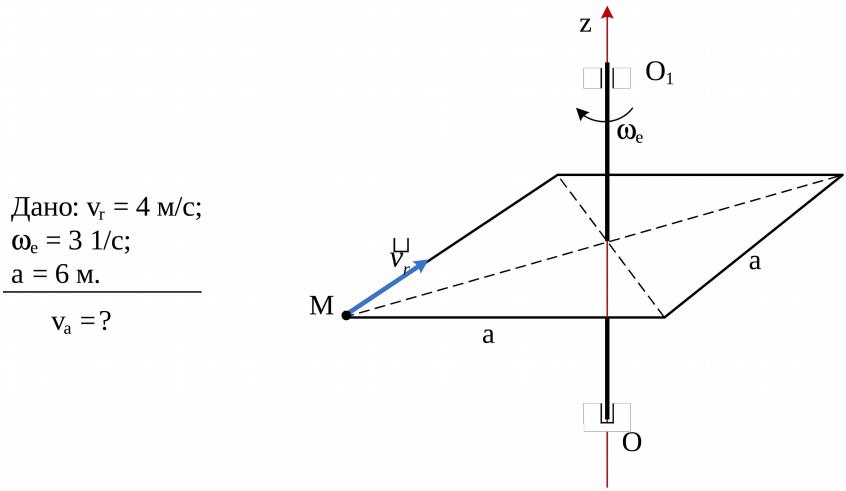
vay =4+0 =4м/с; |
|
|
|
|||||
vax =3+2 =5м/с; |
|
|
|
||||||||
|
|
va = vax2 |
+vay2 = 52 +42 |
= 41 =6,4м/с. |
|
||||||
22

Пример 6
23

Решение
24

va =vr +ve ;
vr = |
dsr |
=0,6t; |
|
|
|
|
|
|
|
|||
|
|
|
|
ö |
|
|
|
|||||
|
|
dt |
æ |
|
|
|
|
|
|
|||
|
|
|
|
d ç1+0,5sin |
æt ö |
|
|
|
||||
|
dy |
çp |
÷ |
|
æt ö |
|||||||
|
ç |
|
|
|
ç 2 |
÷ |
|
|||||
|
|
|
|
è |
|
|
è |
ø |
|
|
|
|
ve = |
|
e = |
|
|
|
ø= pcosçp |
; |
|||||
|
|
|
|
|
|
|||||||
|
|
dt |
|
|
|
dt |
|
|
4 |
ç |
÷ |
|
|
|
|
|
|
|
|
è2 |
ø |
||||
vr (t1) =0,6×2 =1,2; |
|
|
|
|
|
|||||||
|
|
|
|
æ |
2 |
ö |
|
|
|
|
|
|
v t |
|
= pcosç |
p× |
= pcos p =- p |
; |
|
||||||
|
|
|
||||||||||
e ( 1) |
4 |
ç |
|
÷ |
|
( ) |
4 |
|
|
|||
|
è 2 |
|
ø 4 |
|
|
|
|
|||||
25

vax1 |
=vr cos(45o) =1,2× 2 |
=0,84; |
|
|
|
|
2 |
|
|
vay |
=- p |
+1,2×cos45o =- 0,79 +0,848 =0,05; |
||
1 |
4 |
|
|
|
|
|
|
|
|
va = vax2 |
+vay2 = 0,842 +0,052 |
=0,841м/с. |
||
|
1 |
1 |
|
|
26
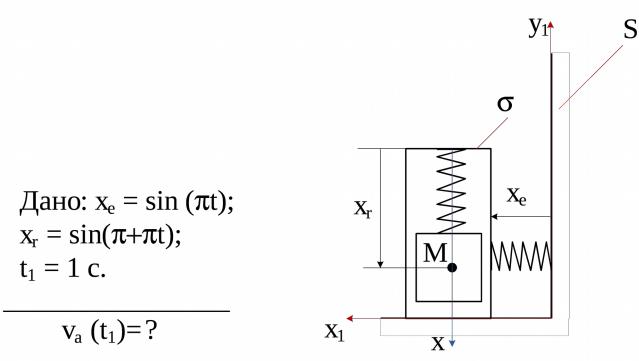
Пример 7
27

Решение
28
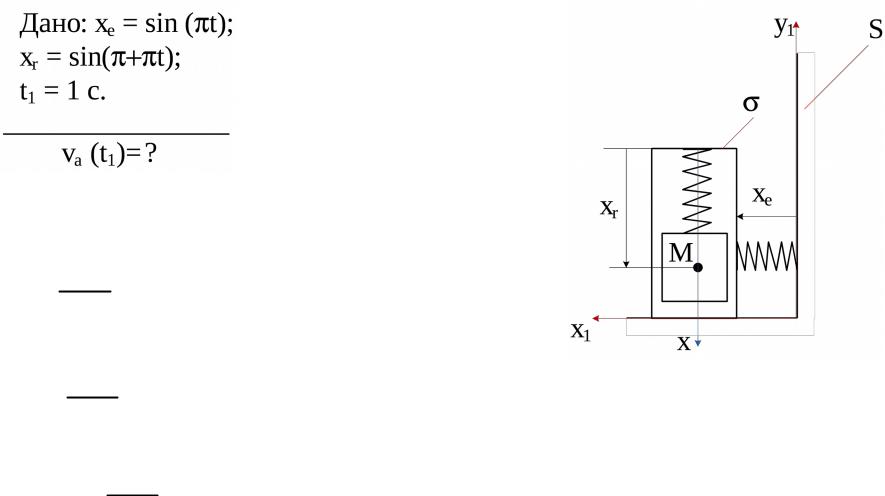
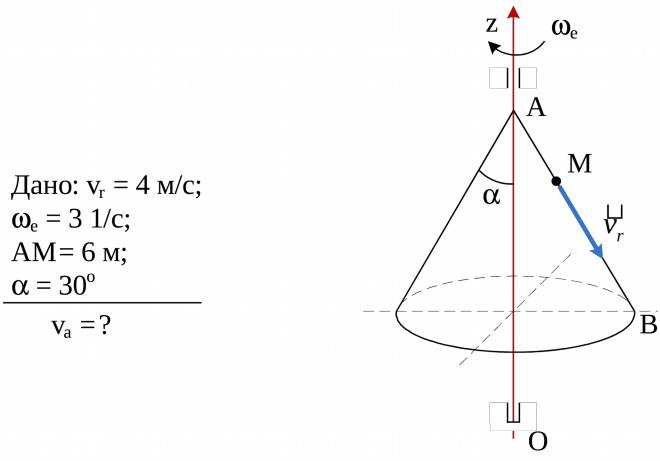
va =vr +ve ;
vr = dxdtr =pcos(p+pt);
ve = dxdte =pcos(pt);
vr (t1) = dxdtr =pcos( 2p) =p; ve (t1) = dxdte =pcos(p) =- p;
29
vr (t1) = dxdtr =pcos( 2p) =p;
ve (t1) = dxdte =pcos(p) =- p;
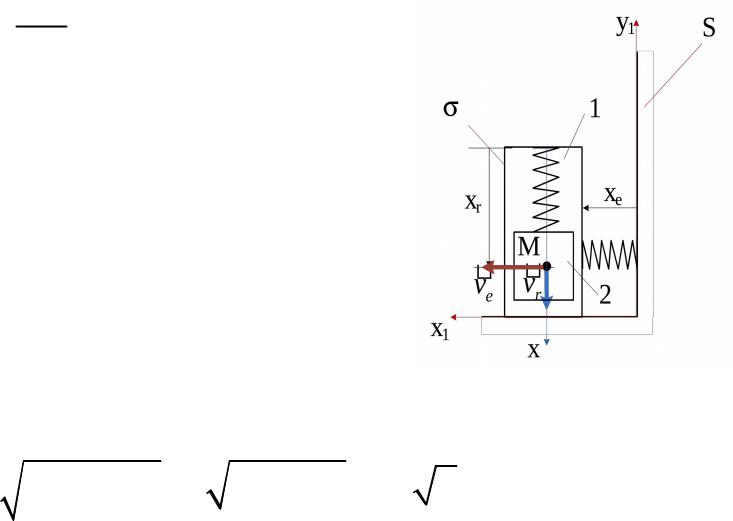
vax1 =vex1 =- p; vay1 =vrx1 =p;
va = vax2 |
+vay2 |
= p2 +p2 =p 2 = 4,44м/с. |
1 |
1 |
|
30
4. Задачи для самостоятельного решения
4.1.
Ответ:
6,708
31
4.2.
32
4.3.
33