

Цель работы: изучение гармонических колебаний; определение приведенной длины физического маятника и ускорения свободного падения.
Основные понятия
Простейшим типом колебаний является гармоническое колебание, когда смещение тела от положения равновесия зависит от времени по закону синуса или косинуса (рис. 1 а):
![]() (1)
(1)
где Х - величина смещения тела от положения равновесия, А - амплитуда колебания - максимальное смещение от положения равновесия; амплитуда равна максимальному абсолютному значению x в моменты t, когда
функция sin или cos принимает значения ±1, t+0 - фаза колебания, определяющая положение колеблющегося тела в данный момент.
Основные характеристики колебаний - амплитуда, частота, период. Частота колебаний равна числу полных колебаний, совершаемых за единицу времени. Единицей частоты является Герц (Гц) - частота такого колебания, при котором за 1с совершается одно полное колебание. Периодом колебаний называется промежуток времени, за который совершается одно полное колебание. Период связан с частотой соотношением: Tv= l.
Циклическая или круговая частота колебания численно равна числу
полных колебаний, совершаемых за 2 секунд: = 2.
Тело совершает гармонические колебания, когда на него действует упругая сила, пропорциональная величине смещения от положения равновесия
![]() (2)
(2)
где k - коэффициент упругости. Знак минус указывает, что возвращающая сила направлена в сторону, противоположную смещению, то есть к положению равновесия.
Запишем для колеблющегося тела второй закон Ньютона:
![]() (3)
(3)
Уравнение можно переписать
![]() и ввести обозначение:
и ввести обозначение:
![]() (4)
(4)
Тогда уравнение примет вид:
![]() (5)
(5)
Это и есть дифференциальное уравнение
гармонических колебаний. Одним из
решений такого уравнения является
![]() .
Циклическая частота колебания
0
называется циклической частотой
собственных колебаний. Период таких
колебаний:
.
Циклическая частота колебания
0
называется циклической частотой
собственных колебаний. Период таких
колебаний:
![]() (6)
(6)
При гармоническом колебательном движении кинетическая энергия колеблющейся материальной точки непрерывно меняется. Меняется и потенциальная энергия взаимодействия между точкой и окружающими телами.
Кинетическая энергия колеблющейся точки массой m:
![]()
Потенциальная энергия квазиупругих сил, отсчитываемая от положения равновесия данной материальной точки:
![]() ,
,
где x - смешение колеблющейся точки от положения равновесия, k - коэффициент квазиупругой силы.
Полная энергия материальной точки, совершающей гармоническое
колебание с частотой и амплитудой А:
![]()
В процессе движения происходит непрерывный переход кинетической энергии в потенциальную и обратно, но полная энергия - величина постоянная, она пропорциональна квадрату амплитуды колебаний.
Собственные гармонические колебания системы - это идеальный случай колебаний, когда энергия системой не теряется и амплитуда остается постоянной. В случае реальных колебаний энергия, переданная системе, постепенно расходуется на преодоление сил сопротивления, поэтому амплитуда колебаний уменьшается, колебания затухают. Эти колебания называются затухающими (рис. 1 б, в). Их частота определяется свойствами колеблющейся системы - массой, возвращающей силой, сопротивлением.
Если сила сопротивления среды
пропорциональна скорости колебания,
то есть![]() ,
второй закон Ньютона для колеблющейся
точки запишется:
,
второй закон Ньютона для колеблющейся
точки запишется:
![]() (7)
(7)
Введем обозначения 2β = r/m ; ω02=k/m.
Решение уравнения (7) имеет вид:
![]() (8)
(8)
Амплитуда затухающих колебаний,
уменьшается по закону
![]() (рис.
1б), частота затухающих колебаний
(рис.
1б), частота затухающих колебаний
![]() ,
(9)
,
(9)
Если ω0<β , частота является мнимым числом и имеет место апериодический процесс - рис. 1в

![]()
![]()
![]()
Рис 1.
В случае затухающих колебаний энергия убывает по закону
![]() (10)
(10)
Величина отношения энергии к мощности потерь за время Т/2π = 1/ω характеризует способность колебательной системы сохранять энергию и называется добротностью:
![]() (11)
(11)
Добротность равна числу колебаний за время, за которое амплитуда уменьшается в eπ раз, а энергия в е 2π раз.
Степень затухания колебаний характеризуется логарифмическим декрементом, который определяет затухание колебаний за период:
![]() (12)
(12)
Для изучения колебаний можно использовать физический или математический маятники.
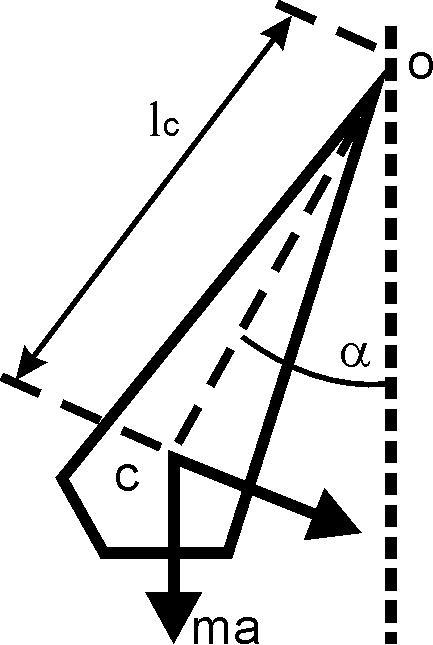
Каждое тело, подвешенное в точке, лежащей выше его центра тяжести, может колебаться и представляет собой физический маятник. На рис. 2 изображен физический маятник, отклоненный от положения равновесия.
Через точку О перпендикулярно рисунку проходит неподвижная ось, вокруг которой совершаются колебания, С - центр тяжести маятника (точка, в которой приложена сила тяжести mg).
|
Момент
силы mg относительно оси
О равен
где J - момент инерции физического маятника относительно оси вращения. Это уравнение аналогично дифференциальному уравнению (5); величина
|
Рис. 2 |
![]() (14)
(14)
Решение уравнения (13)
![]() описывает гармонические колебания,
совершаемые физическим маятником.
Период таких колебаний:
описывает гармонические колебания,
совершаемые физическим маятником.
Период таких колебаний:
![]() (15)
(15)
Для математического маятника (математическим маятником называют колеблющееся тело, размерами которого можно пренебречь по сравнению с расстоянием от центра масс тела до оси вращения) в случае малых углов отклонения дифференциальное уравнение колебаний выглядит:
![]() (16)
(16)
Период колебаний математического маятника:
![]() (17)
(17)
Физический маятник, описываемый
(13), колеблется так же (с таким же
периодом), как и математический маятник,
описываемый (16), имеющий
длину
![]() где lс - расстояние от
О до С.
где lс - расстояние от
О до С.
Приведенной длиной 1о физического маятника называется длина такого математического маятника, который имеет тот же период колебаний, что и данный физический маятник.
Если к оси физического маятника подвесить груз на нити такой длины, чтобы она была равна приведенной длине данного физического маятника (рис. 3), то отклоненные на одинаковый угол физический маятник и
|
Рис. 2 |
груз колеблются вместе, так что груз все время находится в одной и той же точке физического маятника - его центре качаний.
Приведенная длина 1о всегда больше
1с , то есть центр качаний
всегда лежит ниже центра тяжести. По
теореме Штейнера момент инерции
относительно оси маятника
Точка подвеса и центр качаний обратимы. Теорема Гюйгенса: если физический маятник подвесить за центр качания, его период не изменится и прежняя точка подвеса будет новым центром качания. Докажем теорему Гюйгенса следующим образом. Расстояние СО' от |
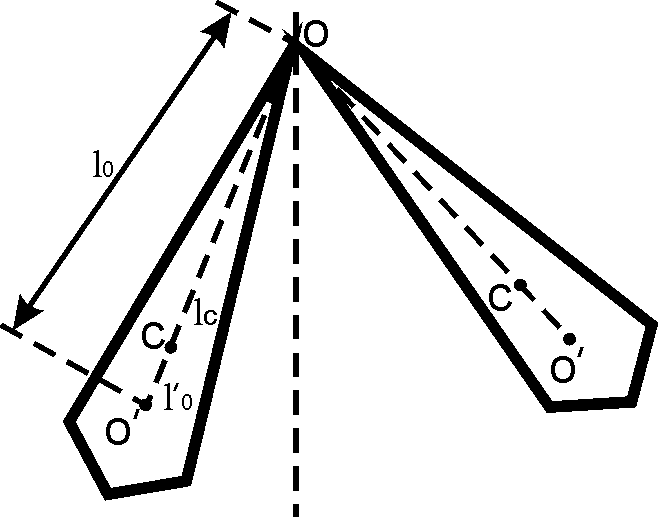
центра тяжести до новой оси О'
![]() ,
где 1о == 00' - прежняя
приведенная длина, 1с = ОС
- расстояние от центра тяжести до
прежней оси. Поэтому новая приведенная
длина будет равна:
,
где 1о == 00' - прежняя
приведенная длина, 1с = ОС
- расстояние от центра тяжести до
прежней оси. Поэтому новая приведенная
длина будет равна:
![]() (18)
(18)
где J’ - момент инерции маятника относительно оcи О'.
По теореме Штейнера J' = Jo + m(lo - 1с)2, откуда
![]() (19)
(19)
где Jo -
момент относительно оси, проходящей
через центр тяжести . Но,
с другой стороны, так как
![]() ,
подставив
,
подставив
![]() в
(19), получим:
в
(19), получим:
![]() (20)
(20)
Мы получили, что l0’=l0 –обратимость точки подвеса и центра качаний.