

Лекция по теории систем 4
.docЛекция № 4.
Примеры определения весовой функции
1.Идеальная следящая система (ИСС).
![]() .
.
Система не изменяет входное воздействие. В соответствии с принципом суперпозиции
![]()
весовая функция
![]() .
.
2.Идеальный экстраполятор.
![]() ,
,
![]() .
.
Система сдвигает
входное воздействие на a
временных единиц (эта система является
примером физически неосуществимой
системы, т. к. предсказывает те значения
входного воздействия, которые на нее
еще не поступали). Т.к. весовая функция
![]() и
и
![]() ,
то весовая функция
,
то весовая функция
![]() .
.
3.Идеальная запаздывающая система.
![]() ,
,
![]()
Аналогично примеру
2,
![]() ,
но
,
но
![]() .
.
4.Идеальная дифференцирующая система (идеальный дифференциатор).
Система рассчитывает
производную входного воздействия:
![]() Весовая функция рассчитывается в
соответствии с определением
Весовая функция рассчитывается в
соответствии с определением
![]()
5.Идеальный интегратор.
Система рассчитывает
интеграл от входного воздействия:
![]() .
.
Воспользуемся «близостью» форм записи реакции системы и реакции общей модели линейной системы:
![]() .
Поэтому
.
Поэтому![]() (см. лекцию 3).
(см. лекцию 3).
Многомерные системы. Описание в макроподходе
Система имеет m входов и n выходов:

В силу принципа суперпозиции, реакция системы по каждому выходу может быть определена как суперпозиция реакций на воздействие по каждому из входов.

Принцип суперпозиции позволяет рассмотреть одномерную систему, у которой входное воздействие ui(t), а реакцию - yk(t). Тогда составляющая реакции, определяемая входом i, равна:
![]()
а реакция по k выходу при приложении воздействия на вход i имеет вид:
 .
.
С учетом линейности операторов суммирования и дифференцирования:
 ,
,![]()
- реакция по выходу
![]()
Введем в рассмотрение матрицу G:
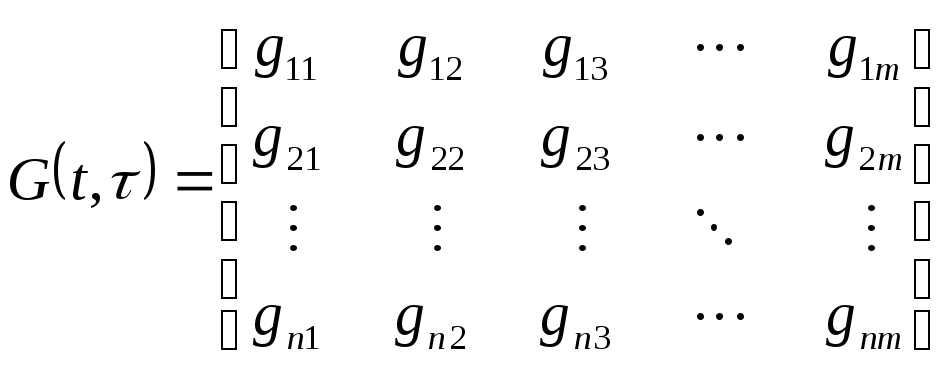 -
-
матрицу импульсных переходных (весовых) функций;
вектор U:
![]() - вектор входных воздействий;
- вектор входных воздействий;
вектор Y:
![]() - вектор реакций системы.
- вектор реакций системы.
Тогда имеем:
![]() .
.
Таким образом, вновь получена структура математической модели, соответствующая результатам применения линейного оператора, но теперь для векторных входных воздействий и реакций.
Замечание 1.
Очевидно, что процедура определения
матрицы импульсных переходных функций
может быть произведена с использованием
импульсного воздействия, подаваемого
на один из входов системы. Легко заметить,
что при подаче импульсного воздействия
в виде
![]() -функции
на i-й
вход многомерной системы на каждом из
выходов с номером k
(
-функции
на i-й
вход многомерной системы на каждом из
выходов с номером k
(![]() )
зафиксируется реакция в виде импульсной
переходной функции
)
зафиксируется реакция в виде импульсной
переходной функции
![]() ,
т.е. будет определен i-й
столбец матрицы G.
,
т.е. будет определен i-й
столбец матрицы G.
Замечание 2.
Для физически осуществимых систем
![]() ,
при
,
при
![]() ,
поэтому
,
поэтому![]() .
.