

8.2. Структурные схемы системы тп-д
На
рис.8.6, а представлена структурная схема
системы управления двигателем постоянного
тока с вентильным (тиристорным)
преобразователем, состоящая из
преобразователя
![]() и двигателя
и двигателя
![]() .
В этой схеме
.
В этой схеме
![]() -
наименьшая постоянная времени (постоянная
времени преобразователя);
-
наименьшая постоянная времени (постоянная
времени преобразователя);
![]() и
и
![]() - электромагнитная и электромеханическая
постоянные времени двигателя, подлежащие
компенсации.
- электромагнитная и электромеханическая
постоянные времени двигателя, подлежащие
компенсации.
Следовательно,
чтобы скомпенсировать их влияние на
динамику системы, необходимо применение
двух контуров регулирования (рис. 8.6,
б): внутренний контур регулирования
тока с регулятором тока
![]() и внешний контур регулирования скорости
с регулятором скорости
и внешний контур регулирования скорости
с регулятором скорости
![]() .
.
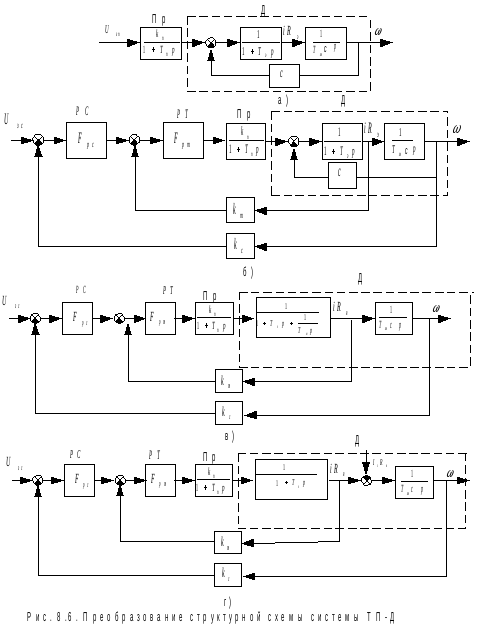
Для удобства преобразуем схему рис. 8.6,б в схему рис. 8.6, в.
Пользуясь
(8.10), найдем передаточную функцию
регулятора тока
![]()
|
|
(8.14) |
Если
![]() существенно больше
существенно больше
![]() (примерно в два раза и более), то в
числителе уравнения (8.14) можно пренебречь
третьим членом и тогда передаточная
функция регулятора тока
(примерно в два раза и более), то в
числителе уравнения (8.14) можно пренебречь
третьим членом и тогда передаточная
функция регулятора тока
![]() будет иметь вид
будет иметь вид
|
|
(8.15) |
При указанном допущении можно пользоваться схемой рис. 8.6, г, в которой опущена внутренняя обратная связь двигателя, что приводит к значительному упрощению расчетов параметров системы.
Передаточная
функция регулятора скорости определяется
по (8.14), где
![]() ;
;
![]() ;
;
![]()
|
|
(8.16) |
где
![]() -коэффициент ЭДС (момента) двигателя
при номинальном магнитном потоке;
-коэффициент ЭДС (момента) двигателя
при номинальном магнитном потоке;
![]() и
и
![]() - ЭДС и скорость идеального холостого
хода;
- ЭДС и скорость идеального холостого
хода;
![]() и
и
![]() - номинальные момент и ток двигателя.
- номинальные момент и ток двигателя.
Подставляя рассчитанные значения передаточных функций регуляторов в схему рис. 8.6, г, получаем оптимальную структурную схему, для которой действительна передаточная функция
|
|
(8.17) |
и соответствующая ей переходная функция (таблица 8.1), т.е.
|
|
(8.18) |
где
![]() - скорость идеального холостого хода
двигателя;
- скорость идеального холостого хода
двигателя;
![]() - текущее значение скорости.
- текущее значение скорости.
Учитывая
, что
![]() ,
после соответствующих преобразований
поучаем
,
после соответствующих преобразований
поучаем
|
|
(8.19) |
 ,
,
г де
де
![]() - относительное время;
- относительное время;
![]() - действительное время.
- действительное время.
На рис.8.7 представлены кривые переходного процесса скорости и тока двигателя, рассчитанные по уравнениям (8.18) и (8.19).
8.3. Влияние нагрузки на работу системы
Момент статического сопротивления и управляющий сигнал приложены в разных местах системы (рис 8.8, г), поэтому поведение системы при воздействии со стороны нагрузки не аналогично поведению системы при воздействии со стороны управления.
Исходное
уравнение для системы ТП-Д (рис. 8.6, г) с
учетом действия сигнала управления
![]() и
сигнала нагрузки
и
сигнала нагрузки
![]() имеет
вид
имеет
вид
![]() ,
,
где
![]() - передаточная функция замкнутого
контура тока;
- передаточная функция замкнутого
контура тока;
![]() - передаточная
функция регулятора скорости.
- передаточная
функция регулятора скорости.
Для
определения влияния на систему только
нагрузки в этом уравнении следует
положить
![]() .
Обозначив изменение скорости двигателя,
связанное с воздействием нагрузки,
через
.
Обозначив изменение скорости двигателя,
связанное с воздействием нагрузки,
через
![]() ,
получим
,
получим
![]() ,
,
откуда
|
|
(8.20) |
После соответствующих преобразований в (8.20) напишем
|
|
(8.21) |
Учитывая, что
|
|
(8.22) |
и
исключая
![]() из (8.26), будем иметь
из (8.26), будем иметь
|
|
(8.23) |
где
![]() - относительное изменение скорости;
- относительное изменение скорости;
![]() -
естественный статический перепад
скорости.
-
естественный статический перепад
скорости.
Уравнению (8.23) соответствует переходная функция
|
|
(8.24) |
а уравнению (8.21)
|
|
(8.25) |
В
последних уравнениях
![]() .
.
По
уравнениям (8.24) и (8.25) рассчитаны
переходные функции для двух контурной
системе, настроенной на модульный
оптимум, при ударном приложении нагрузки
(исходные постоянные времени:
![]() ;
;
![]() ).
).
Результаты
расчетов представлены на рис. 8.10.
Установившийся перепад скорости в
замкнутой системе зависит от соотношения
постоянных времени
![]() и
и
![]() ,
для рассматриваемого случая:
,
для рассматриваемого случая:
![]()

|
Рис.
8. 10. Кривые переходного процесса
относительного тока ( |
Рис.
8. 11. Кривые переходных процессов
относительного перепада скорости
( |
На
рис. 8.11 представлены кривые перепада
скорости для трех значений
![]() (кривая
1 –
(кривая
1 –![]() ;
кривая 2 -
;
кривая 2 -
![]() ;
кривая 3 -
;
кривая 3 -
![]() ),
для всех трех случаев
),
для всех трех случаев
![]() .
.
Если статизм, получаемый в двухконтурной системе, настроенной по модульному оптимуму, не удовлетворяет требованиям технологии, то рекомендуется применять не пропорциональный, а интегрально-пропорциональный регулятор скорости, при котором система превращается из статической в астатическую, настроенную на симметричный оптимум.
Для астатической системы ТП-Д (рис 8.12) передаточная функция регулятора скорости
|
|
(8.26) |
Передаточная
функция регулятора содержит форсирующее
звено
![]() ,
которое форсирует переходный процесс
в сравнении со статической системой
при воздействии со стороны управления.
Для компенсации его влияния необходимо
на вход системы установить инерционное
звено с передаточной функцией
,
которое форсирует переходный процесс
в сравнении со статической системой
при воздействии со стороны управления.
Для компенсации его влияния необходимо
на вход системы установить инерционное
звено с передаточной функцией
|
|
(8.28) |

Рис.8. 12. Структурная схема астатической системы регулирования скорости
Передаточная функция системы ТП-Д с интегрально-пропорциональным регулятором скорости при воздействии со стороны нагрузки имеет вид:
для перепада скорости
|
|
(8.29) |
для тока двигателя
|
|
(8.30) |
Переходные функции, соответствующие приведенным уравнениям будут иметь вид:
|
|
(8.41) |
|
|
(8.42) |
г де
де
![]() .
.
На рис 8.13 построены кривые изменения скорости и тока при ударном приложении нагрузки в астатической системе с ИП-регулятором скорости.
Рис.
8.13. Кривые переходного процесса
относительного тока (![]() )
и относительного перепада скорости (
)
и относительного перепада скорости (![]() )
в двухконтурной системе, настроенной
по симметричному оптимуму, при ударном
приложении нагрузки
)
в двухконтурной системе, настроенной
по симметричному оптимуму, при ударном
приложении нагрузки