

Лекция 15
Глава 8. Системы управления электроприводами с последовательной коррекцией при подчиненном регулировании параметров
При проектировании систем автоматического управления (регулирования) электроприводов производственных механизмов обычно возникают следующие вопросы: выбор типа электропривода, системы управления, параметров системы с таким расчетом, чтобы получить оптимальный характер переходного процесса.
О птимальным
переходным процессом принято считать
такой процесс, при котором время изменения
регулируемого параметра от нуля до
установившегося значения
птимальным
переходным процессом принято считать
такой процесс, при котором время изменения
регулируемого параметра от нуля до
установившегося значения
![]() (рис.8.1) было бы минимально возможным, а
величина перерегулирования
(рис.8.1) было бы минимально возможным, а
величина перерегулирования
![]() не
превышала допустимого значения.
не
превышала допустимого значения.
Обще известно, что характер переходного процесса зависит от соотношения постоянных времени и оптимальному характеру переходного процесса должно соответствовать оптимальное соотношение постоянных времени. Если соотношение постоянных времени не соответствует оптимальному, то необходимо введение корректирующих звеньев.
В зависимости от способа включения корректирующих звеньев различают параллельную или последовательную коррекцию. В ряде случаев встречается также смешанная коррекция. Недостатками систем с параллельной коррекцией является сложность расчетов параметров корректирующих звеньев и большие трудности при настройке. Системы с последовательной коррекцией, построенные по принципу подчиненного регулирования, отличаются простотой расчета и настройки.
8.1. Общие принципы синтеза систем с последовательной коррекцией при подчиненном регулировании параметров
Система подчиненного регулирования с последовательной коррекцией, как правило, многоконтурная. Она состоит из ряда контуров, число которых равно числу регулируемых параметров. К регулируемым параметрам относятся ток, скорость двигателя, положение рабочего органа механизма и т.д.
На рис. 8.2 приведена обобщенная структурная схема многоконтурной системы подчиненного регулирования, на которой приняты следующие обозначения:
Пр – силовой преобразователь;
![]() -
коэффициенты обратных связей контуров;
-
коэффициенты обратных связей контуров;
![]() -
передаточные функции объектов контуров;
-
передаточные функции объектов контуров;
![]() -
передаточные функции регуляторов
-
передаточные функции регуляторов
![]() ;
;
![]() -
задающие сигналы контуров;
-
задающие сигналы контуров;
![]() -
выходные сигналы контуров;
-
выходные сигналы контуров;
![]() -
передаточная функция преобразователя.
-
передаточная функция преобразователя.
В
каждом регулируемом контуре имеется
свой регулятор (![]() )
назначение которого сводится к
установлению требуемого отношения
эквивалентных постоянных времени
данного замкнутого контура. Любой
)
назначение которого сводится к
установлению требуемого отношения
эквивалентных постоянных времени
данного замкнутого контура. Любой![]() контур является управляющим (внешним)
по отношению к
контур является управляющим (внешним)
по отношению к![]() контуру и подчиненным (внутренним) по
отношению к
контуру и подчиненным (внутренним) по
отношению к![]() контуру.
контуру.
Настройка многоконтурной системы с подчиненным регулированием производится путем последовательной оптимизации каждого контура, начиная от первого внутреннего и кончая последним внешним. Смысл оптимизации контура заключается в том, чтобы регулируемый параметр наиболее быстро и точно следовал за изменением задания, а также мало зависел от внешних возмущений.

При оптимизации каждого контура регулирования действительную его структурную схему следует заменить оптимальной эквивалентной.
Оптимальные
структуры.
На рис. 8.3 представлена оптимальная
структура многоконтурной системы,
состоящей из
![]() контуров. При надлежащем выборе
соотношения постоянных времени такая
структурная схема может обеспечить
удовлетворительный характер переходного
процесса при воздействии со стороны
управляющего воздействия.
контуров. При надлежащем выборе
соотношения постоянных времени такая
структурная схема может обеспечить
удовлетворительный характер переходного
процесса при воздействии со стороны
управляющего воздействия.

Первый
контур состоит из инерционного и
интегрирующего звеньев, последовательно
соединенных и охваченных обратной
связью с коэффициентом
![]() .
Передаточная функция первого контура
оптимальной структурной схемы имеет
вид
.
Передаточная функция первого контура
оптимальной структурной схемы имеет
вид
|
|
(8.1) |

И з
(8.1) следует, что характер переходного
процесса не зависит от коэффициента
обратной связи
з
(8.1) следует, что характер переходного
процесса не зависит от коэффициента
обратной связи![]() Исключение влияния этого коэффициента
получено благодаря введению его в
знаменатель последовательного
корректирующего звена
Исключение влияния этого коэффициента
получено благодаря введению его в
знаменатель последовательного
корректирующего звена![]() .
.
При
условии
![]() переходный процесс имеет апериодический
характер (кривая 1 рис. 8.4), при
переходный процесс имеет апериодический
характер (кривая 1 рис. 8.4), при![]() переходный процесс колебательный с
перерегулированием 4,3 % (кривая 2 рис.
8.4).
переходный процесс колебательный с
перерегулированием 4,3 % (кривая 2 рис.
8.4).
Кривая
3 соответствует соотношению
![]() .
Оптимальное соотношение постоянных
времени не есть понятие абсолютное, так
как оно определяется не только
быстродействием, но и зависит от
допустимой по условиям технологического
процесса величиной перерегулирования.
.
Оптимальное соотношение постоянных
времени не есть понятие абсолютное, так
как оно определяется не только
быстродействием, но и зависит от
допустимой по условиям технологического
процесса величиной перерегулирования.
В дальнейшем будем считать оптимальным соотношением постоянных времени, равным двум
|
|
(8.2) |
Соотношение (8.2) широко применяется на практике под названием модульного оптимума.
Принимая
![]() ,
из (8.1) получаем
,
из (8.1) получаем
|
|
(8.3) |
здесь
![]() и
и
![]() -
соответственно наибольшая и наименьшая
постоянные времени.
-
соответственно наибольшая и наименьшая
постоянные времени.
Оптимальная
структура второго контура регулирования
получается при подключении на вход
первого контура корректирующего звена
с передаточной функцией
![]() и
применяя обратную отрицательную связь
с коэффициентом
и
применяя обратную отрицательную связь
с коэффициентом
![]() .
Наличие коэффициентов обратных связей
в передаточных функциях интегрирующих
звеньев позволяет исключить влияние
этих коэффициентов на характер переходного
процесса.
.
Наличие коэффициентов обратных связей
в передаточных функциях интегрирующих
звеньев позволяет исключить влияние
этих коэффициентов на характер переходного
процесса.
Передаточная функция второго контура оптимальной структуры имеет вид
|
|
(8.4) |
При условии модульного оптимума
|
|
(8.5) |
будем иметь
|
|
(8.6) |
Здесь
![]() ,
,
![]() и
и
![]() -
соответственно наибольшая, средняя и
наименьшая постоянные времени.
-
соответственно наибольшая, средняя и
наименьшая постоянные времени.
Оптимальная
структура третьего контура регулирования
получается при подключении на вход
второго контура корректирующего звена
с передаточной функцией
![]() и
применяя обратную отрицательную связь
с коэффициентом
и
применяя обратную отрицательную связь
с коэффициентом
![]() .
.
Передаточная функция третьего контура оптимальной структуры имеет вид
|
|
(8.7) |
В этом случае за основу расчета третьего контура берется соотношение
|
|
(8.8) |
при котором передаточная функция третьего контура будет иметь вид
|
|
(8.9) |
Применяя
ту же методику можно получить аналогичные
уравнения и для
![]() ой
системы.
ой
системы.
Переходные функции, соответствующие передаточным функциям (8.3), (8.6 и (8.9) представлены в таблице 8.1.
Таблица 8.1.
|
Число контуров |
Переходная
функция
|
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
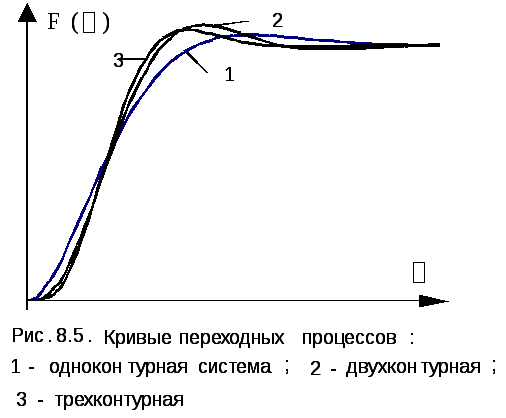
На
рис. 8.5 по уравнениям таблицы 8.1 построены
кривые
![]() ,
из которых следует, что характер
переходных процессов мало меняется с
увеличением числа контуров. Поэтому
вполне допустимо определить характер
переходного процесса системы с большим
числом контуров по уравнениям третьего
порядка, а при ориентировочных расчетах
– по уравнению второго порядка.
,
из которых следует, что характер
переходных процессов мало меняется с
увеличением числа контуров. Поэтому
вполне допустимо определить характер
переходного процесса системы с большим
числом контуров по уравнениям третьего
порядка, а при ориентировочных расчетах
– по уравнению второго порядка.
Определение передаточных функций регуляторов.
Чтобы переходный процесс в первом контуре многоконтурной системы соответствовал переходному процессу в первом контуре оптимальной системы с оптимальным соотношением постоянных времени, необходимо равенство передаточных функций сравниваемых контуров. Этому случаю соответствует равенство
![]() ,
,
где левая часть представляет собой значение передаточной функции разомкнутого первого контура многоконтурной системы (рис. 8.2), а правая часть – значение передаточной функции разомкнутого первого контура оптимальной структуры (рис. 8.3).
При
![]() и
и
![]() из последнего равенства получим
из последнего равенства получим
|
|
(8.10) |
Сравнивая между собой передаточные функции вторых контуров системы (рис. 8.2) с системой оптимальной (рис.8.3) получим
![]() ,
,
где
![]() - передаточная функция замкнутого
первого контура.
- передаточная функция замкнутого
первого контура.
Правая часть этого равенства представляет собой передаточную функцию разомкнутого второго контура многоконтурной системы (рис. 8.2), а левая часть – передаточную функцию разомкнутого контура оптимальной структуры (рис. 8.3).
Принимая
во внимание условие (8.5), при
![]() будем
иметь
будем
иметь
|
|
(8.11) |
Сравнивая между собой передаточные функции третьих контуров обеих схем, получим
![]() ,
,
откуда
, учитывая условие (8.8), при
![]() получим
получим
|
|
(8.12) |
Аналогично
для любого
![]() го
контура передаточная функция регулятора
определяется по формуле
го
контура передаточная функция регулятора
определяется по формуле
|
|
(8.13) |
Если
передаточные функции регуляторов
контуров выбраны по уравнениям (8.10)
![]() (8.13),
то переходные процессы оптимизируемой
системы будут оптимальными.
(8.13),
то переходные процессы оптимизируемой
системы будут оптимальными.