

8.5. Ограничение тока и производной скорости
По
условиям надежности работы электропривода
возникает необходимость в ограничении
тока якоря двигателя как в переходном,
так и в установившемся режимах. С этой
целью в схемах регулирования скорости
(рис. 8.22,а) применяют узел ограничения,
включаемый параллельно выходному
резистору
![]() регулятора скорости. Узел ограничения
может состоять из двух встречно
соединенных и последовательно включенных
стабилитронов
регулятора скорости. Узел ограничения
может состоять из двух встречно
соединенных и последовательно включенных
стабилитронов![]() и
и![]() .
.

Рис. 8.22. Схема узла ограничения тока двигателя (а) и его характеристика (б)
Ограничение
тока двигателя производится за счет
ограничения напряжения на выходном
сопротивлении
![]() регулятора скорости, т. е. за счет
ограничения выходного напряжения
регулятора скорости, т. е. за счет
ограничения выходного напряжения![]() регулятора
скорости, подаваемого на вход регулятора
тока, так как
регулятора
скорости, подаваемого на вход регулятора
тока, так как![]() ,
,![]() .
.
Когда
напряжение
![]() станет равным напряжению зажигания
(пробоя) стабилитрона
станет равным напряжению зажигания
(пробоя) стабилитрона![]() ,
подключенного в обратном направлении
относительно полярности напряжения
,
подключенного в обратном направлении
относительно полярности напряжения![]() ,
этот стабилитрон окажется проводящим.
При этом повышение напряжения на входе
узла ограничения не вызовет изменения
напряжения на выходе; оно останется
неизменным и равным
,
этот стабилитрон окажется проводящим.
При этом повышение напряжения на входе
узла ограничения не вызовет изменения
напряжения на выходе; оно останется
неизменным и равным![]()
На
рис. 8.22, б представлена характеристика
узла ограничения, т. е. зависимость
![]() для установившегося режима. Когда
напряжение на входе
для установившегося режима. Когда
напряжение на входе![]() связь между выходом и входом -
пропорциональная. Когда
связь между выходом и входом -
пропорциональная. Когда![]() ,
узел работает на насыщенной части
характеристики, а выходная величина
принимает максимальное значение
,
узел работает на насыщенной части
характеристики, а выходная величина
принимает максимальное значение![]() ,
не зависимое от входной величины. Входное
напряжение
,
не зависимое от входной величины. Входное
напряжение![]() ,
соответствующее сочленению линейной
и насыщенной частей характеристики,
называется «пороговым»
напряжением.
,
соответствующее сочленению линейной
и насыщенной частей характеристики,
называется «пороговым»
напряжением.
В процессе разгона двигателя в системе с ограничением тока (под отсечку) напряжение на входе регулятора скорости относительно велико, т. е.
![]() .
.
При
этом условии напряжение выхода регулятора
скорости будет иметь постоянное значение,
равное пороговому напряжению
![]() .
Это означает, что обратная связь по
скорости не влияет на работу системы и
система будет действовать как разомкнутая.
.
Это означает, что обратная связь по
скорости не влияет на работу системы и
система будет действовать как разомкнутая.
По
мере роста скорости разность
![]() уменьшается, и в конечной стадии процесса
при некотором значении скорости эта
разность становится равной пороговому
напряжению:
уменьшается, и в конечной стадии процесса
при некотором значении скорости эта
разность становится равной пороговому
напряжению:
![]() .
.
С этого момента звено с ограничением начинает работать на линейной части характеристики, подключается отрицательная обратная связь по скорости и напряжение выхода звена ограничения уменьшается до нуля.
В системах регулирования с рассмотренным узлом ограничения тока контролируется полный ток двигателя, поэтому динамический ток, а следовательно, и ускорение и замедление привода зависят от тока нагрузки (рис. 8.23).

Рис. 8.23. Кривые переходных процессов пуска при скачкообразном изменении задания и ограничении тока двигателя: кривые 1- под нагрузкой; кривые 2 – вхолостую
Если по условиям технологии необходимо ограничение ускорения привода, то для этого применяют наряду с ограничением полного тока ограничение производной скорости.
Для
ограничения производной скорости
достаточно подавать на вход системы
напряжение управления
![]() не скачкообразно, а изменяющееся по
линейному закону с помощью так называемого
задатчика интенсивности. Принципиальная
схема задатчика приведена на рис. 8.24,
а.
не скачкообразно, а изменяющееся по
линейному закону с помощью так называемого
задатчика интенсивности. Принципиальная
схема задатчика приведена на рис. 8.24,
а.
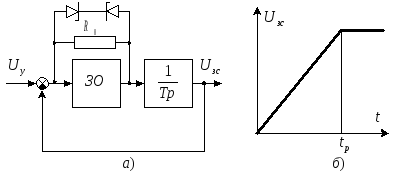
Рис. 8.24. Принципиальная схема задатчика интенсивности и его временная характеристика
На
вход задатчика интенсивности подается
разность сигнала управления
![]() и сигнала обратной связи по выходной
величине интегрирующего звена
и сигнала обратной связи по выходной
величине интегрирующего звена![]() .
.
Если
![]() ,
то выходное напряжение звена ограничения
будет равно напряжению зажигания
(пробоя) стабилитронов. При этом напряжение
на входе системы
,
то выходное напряжение звена ограничения
будет равно напряжению зажигания
(пробоя) стабилитронов. При этом напряжение
на входе системы
![]() будет изменяться по линейному закону
(рис. 8.24, б)
будет изменяться по линейному закону
(рис. 8.24, б)
![]() .
.
На рис. 8.25 приведены кривые пуска при ограничении ускорения вхолостую и под нагрузкой. На рис. 8.26 приведены аналогичные кривые для случая изменения момента сопротивления во время пуска.
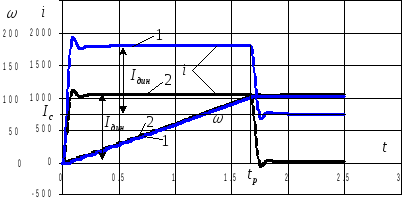
Рис. 8.24. Кривые переходных процессов пуска в САР с задатчиком интенсивности: кривые 1- под нагрузкой; кривые 2 – вхолостую

Рис. 8.25. Кривые переходных процессов пуска в САР с задатчиком интенсивности и ударном приложении нагрузки во время пуска