

5.1.2. Уравнение движения электропривода
По составленной расчетной схеме механической части электромеханической системы можно сформулировать уравнение движения электропривода – уравнение, устанавливающее взаимосвязь между электромагнитным моментом двигателя, моментом нагрузки, моментом инерции и ускорением электропривода. С помощью этого уравнения решаются многие практические задачи движения электропривода.
Наиболее удобным методом составления уравнения движения механической части системы является метод уравнений Лагранжа 2-го рода, записанных без учета диссипативных сил в упругих связях, обусловленных силами вязкого трения (поскольку они существенно меньше потенциальных сил) в виде
 ,
(5.9)
,
(5.9)
где
![]() ,
,![]() – кинетическая и потенциальная энергии
системы, определяемые приn
инерционных и n-1
упругих элементах как
– кинетическая и потенциальная энергии
системы, определяемые приn
инерционных и n-1
упругих элементах как
![]() или
или
![]() ,
(5.10)
,
(5.10)
![]() или
или
![]() ;
(5.11)
;
(5.11)
![]() ,
,
![]() – обобщенная координата, определяющая
положение механизма (угловые
– обобщенная координата, определяющая
положение механизма (угловые![]() и линейные перемещения
и линейные перемещения![]() элементов) и ее скорость (
элементов) и ее скорость (![]() и
и![]() );
);![]() – обобщенная сила, соответствующая
обобщенной координате (при вращательном
движении
– обобщенная сила, соответствующая
обобщенной координате (при вращательном
движении![]() ,
при поступательном –
,
при поступательном –![]() ).
).
Для подавляющего большинства механизмов момент инерции каждого элемента в отдельности и всего механизма в целом не зависят от его положения, т.е.
![]() ,
,
![]() (5.12)
(5.12)
и уравнение Лагранжа 2 рода можно записать в виде:
- в случае трехмассовой системы (рис. 5.3, а)
 ;
(5.13)
;
(5.13)
- в случае двухмассовой системы (рис. 5.3, б)
 ;
(5.14)
;
(5.14)
-
в случае одномассовой (рис. 5.3, в)
абсолютно жесткой системы (![]() )
)
 .
(5.15)
.
(5.15)
В
общем же случае для одномассовой системы
в условиях переменного момента инерции
(![]() )
уравнение движения электропривода
запишется в виде
)
уравнение движения электропривода
запишется в виде
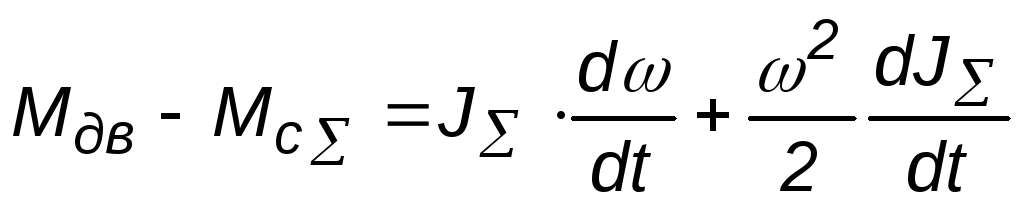 .
(5.16)
.
(5.16)
Приведенные
уравнения движения электропривода
позволяют анализировать возможные
режимы его движения. Для анализа
статических режимов работы электропривода
необходимо принять что
![]() .
Соответственно уравнение статического
режима работы электропривода с жесткими
и линейными механическими связями
примет вид
.
Соответственно уравнение статического
режима работы электропривода с жесткими
и линейными механическими связями
примет вид
![]() .
(5.17)
.
(5.17)
Если
при движении
![]() ,
следовательно,
,
следовательно,![]() и имеет место или динамический переходный
процесс, или установившийся динамический
процесс.
и имеет место или динамический переходный
процесс, или установившийся динамический
процесс.
С энергетической точки зрения режимы работы электропривода разделяются на двигательные и тормозные, отличающиеся направлением потока энергии через механические передачи. Двигательный режим соответствует прямому направлению передачи механической энергии, вырабатываемой двигателем, к рабочему органу механизма. Тормозной режим соответствует обратной передаче энергии, когда освобождающаяся кинетическая энергия поступает от соответствующих масс к двигателю. Это позволяет сформулировать правило знаков момента, которое следует учитывать при использовании приведенных выше уравнений движения:
-
при прямом направлении передачи
механической мощности от двигателя к
механизму
![]() ее знак положителен идвижущие
моменты двигателя имеют знак, совпадающий
со знаком скорости;
ее знак положителен идвижущие
моменты двигателя имеют знак, совпадающий
со знаком скорости;
-
при обратном направлении передачи
механической мощности
![]() ,
поэтомутормозные
моменты имеют знак, противоположный
знаку скорости.
,
поэтомутормозные
моменты имеют знак, противоположный
знаку скорости.