

4.4.3. Тросовая передача
В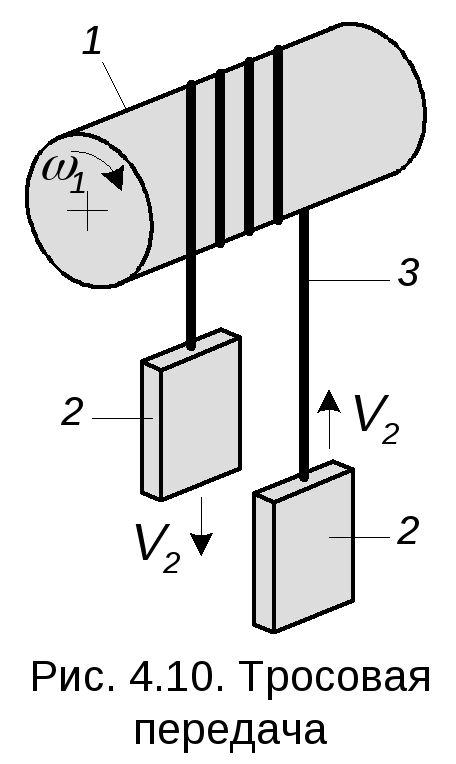 тросовой передаче преобразование
вращательного движения в поступательное
и наоборот между звеньями (ведущим1
и ведомым 2)
осуществляют при помощи троса 3
(рис. 4.10). Тросы изготавливают из стальной
проволоки (обычно оцинкованной).
тросовой передаче преобразование
вращательного движения в поступательное
и наоборот между звеньями (ведущим1
и ведомым 2)
осуществляют при помощи троса 3
(рис. 4.10). Тросы изготавливают из стальной
проволоки (обычно оцинкованной).
При работе тросовой передачи отдельные проволоки троса подвергаются растяжению, изгибу, кручению и смятию. Из условия ограничения напряжения изгиба в тросе минимальный диаметр шкивов находят по условию
![]() ,
(4.19)
,
(4.19)
где
![]() – диаметр троса, мм;
– диаметр троса, мм;![]() – коэффициент, зависящий от режима
работы передачи (при спокойной нагрузке
– коэффициент, зависящий от режима
работы передачи (при спокойной нагрузке![]() ,
при умеренной динамической нагрузке
,
при умеренной динамической нагрузке![]() ,
при резко динамической нагрузке
,
при резко динамической нагрузке![]() ).
).
Передаточное соотношение тросовой передачи составляет
![]() ,
,
![]() ,
(4.20)
,
(4.20)
где
![]() – угловая скорость вращения ведущего
шкива,с-1;
– угловая скорость вращения ведущего
шкива,с-1;
![]() – линейная скорость поступательно
перемещающегося звена,м/с.
– линейная скорость поступательно
перемещающегося звена,м/с.
4.5. Передача винт-гайка
Передачи винт-гайка предназначены для преобразования вращательного движения в поступательное и наоборот. В таких передачах используются пары винт-гайка скольжения (рис. 4.11, а) и винт-гайка качения (рис. 4.11, б). Основными элементами передачи являются: винт 1 и гайка 2.
 В
паре скольжения для повышения к.п.д.
уменьшением потерь на трение между
этими элементами помещаются стальные
шарики 3.
При вращении винта (гайки) шарики
благодаря трению перекатываются по
винтовым поверхностям винта и гайки и
передают вращение от винта к гайке, или
от гайки к винту. Скорость перемещения
шариков отличается от скорости винта
и гайки, поэтому с целью обеспечения
непрерывной циркуляции шариков концы
рабочей части резьбы соединяют возвратным
каналом.
В
паре скольжения для повышения к.п.д.
уменьшением потерь на трение между
этими элементами помещаются стальные
шарики 3.
При вращении винта (гайки) шарики
благодаря трению перекатываются по
винтовым поверхностям винта и гайки и
передают вращение от винта к гайке, или
от гайки к винту. Скорость перемещения
шариков отличается от скорости винта
и гайки, поэтому с целью обеспечения
непрерывной циркуляции шариков концы
рабочей части резьбы соединяют возвратным
каналом.
Передаточное соотношение передачи винт-гайка определится как, м-1:
![]() ,
,
![]() ,
(4.21)
,
(4.21)
откуда линейную скорость винта (гайки) можно рассчитать по зависимости
![]() ,
(4.22)
,
(4.22)
где р – шаг резьбы, мм; к – число заходов резьбы.
В промышленно изготавливаемых передачах винт-гайка передаточное число составляет 300…2000.
К.п.д. передачи винт-гайка качения составляет 0,85…0,95, а винт-гайка скольжения – 0,25…0,6.
Достоинством передачи является высокая точность перемещений, малая металлоемкость. Недостатком – низкий к.п.д. в передачах скольжения и сложность изготовления передач качения.
Контрольные вопросы
1. Сформулируйте определение для преобразователей движения. Какие механические передачи преобразователей движения Вы знаете? Назовите основные характеристики механических передач.
2. Вспомните основные достоинства и недостатки всех известных Вам механических передач.
3. Перечислите основные виды зубчатых передач. Поясните принцип действия планетарной передачи.
4. В чем заключается эффект самостопорения червячной передачи?
Глава 5. Введение в теорию электропривода
В теории электропривода под термином электрический привод понимается электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин, состоящее из механического передаточного устройства, электродвигателя, силового преобразовательного устройства и управляющего устройства. Иначе, электропривод совместно с приводимым в движение рабочим органом (см. рис. В.2) и образует единую электромеханическую систему.