

акустика / nagaenko_av_pezoelektricheskie_preobrazovateli
.pdfГЛАВ 2. ГИДРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И ИХ
ХАРАКТЕРИСТИКИ
Главная задача гидроакустики заключается в возбуждении и/или приеме звуковых волн в жидкости. Звуковые или акустические волны можно рассматривать как механические колебания жидкости, для того чтобы создать эти колебания среды и их детектирования применяют различные колебательные системы.
Для того чтобы колебательная механическая система (устройство)
могла преобразовывать один вид энергии в другой ей необходимо иметь специальную чувствительную поверхность, которая может принимать и/или излучать звуковую волну.
Электрическая энергия и способы ее производства, преобразования,
передачи, усиления получила и т.д. получили максимальное применение в электронной технике. Эта тенденция не обошла стороной и такую область как гидроакустика, где активно применяются различные электроакустические преобразователи. Колебательная электроакустическая система, в которой одновременно происходит преобразование электрической энергии в механическую (акустическую) и наоборот механической в электрическую получила название гидроакустического преобразователя (ГАП).
Основные типы ГАП
Гидроакустические преобразователи классифицируют по различным признакам. Рассмотрим основные типы ГАП.
ГАП по назначению принято разделять на излучатели, приемники и ГАП, работающие в режиме приема-излучения (универсальные или обратимые). Обратимые ГАП работают поочередно то в режиме приема, то в режиме излучения, во всех других случаях преобразователь способен работать независимо только в одном режиме.
ГАП можно разделить по физическим принципам, т.е. физическим явлениям, лежащим в основе их работы, различают электродинамические,
21
электромагнитные, пьезоэлектрически и магнитострикционные преобразователи, стоит отметить, что все указанные преобразователи являются обратимыми, т.е. могут работать в обоих режимах.
Существуют также и не обратимые преобразователь принцип работы которых заключается в изменении одного параметра (например сопротивления или емкости) под действием звуковых волн.
По структуре колебательной системы, т.е. в зависимости от формы и размеров активного элемента ГАП можно разделить на: стержневые,
пластинчатые, сферические, цилиндрические и т.д.
При конструировании стержневых преобразователей активный электромеханический стержень (рис. 3, а), а также может использоваться стержень с накладками по торцам с одной или двух сторон (рис. 3, б, в), важно отметить, что материал накладок не должен быть электромеханически активным.
Пластинчатые ГАП могут изготавливаться из прямоугольной пластины (рис. 3, г) или диска (рис. 3, д), которые колеблются по толщине.
Кроме того, как прямоугольную пластину, так и диск можно опереть в первом случае на грани (рис. 3, е), а во втором по окружности (рис. 3, ж) при этом они будут осуществлять изгибные колебания.
При конструировании цилиндрических ГАП активный элемент выполняют в виде полого цилиндра (кольца), который может совершать пульсирующие радиальные колебания (пульсирующие, рис. 3, з),
осциллирующие радиальные колебания (осциллирующие, рис. 3, и) и
изгибные колебания по окружности (рис. 3, к).
Если используется активный элемент в форме сферы (рис. 3, л) при проектировании ГАП практически всегда осуществляются радиальные пульсирующие колебания.
22
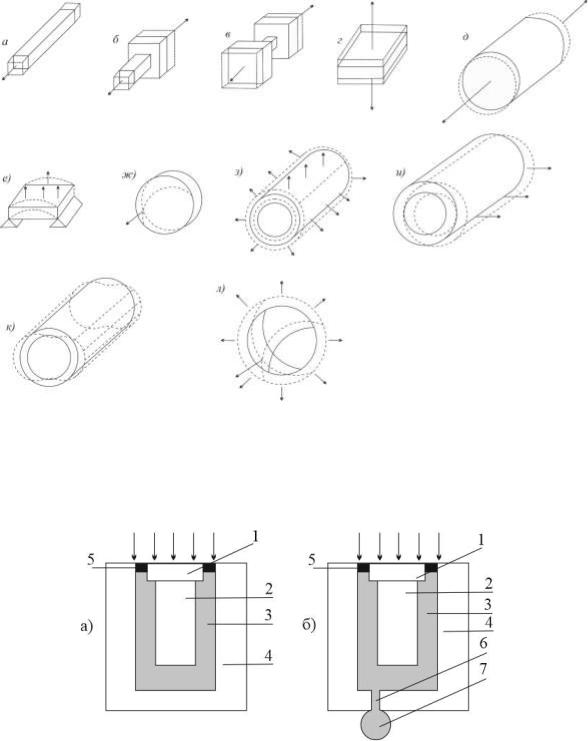
Рис. 3. Различные виды активных элементов ГАП [4]
В зависимости от конструкции различают силовые (рис. 4, а) и
компенсированные (рис. 4, б) ГАП.
Рис. 4. Силовая (а) и компенсированная (б) конструкции ГАП [4]
В зависимости от условий, в которых должен будет работать ГАП
(глубина погружения, величина воздействующей силы и т.д.) обуславливается тип его конструкции. При использовании силового варианта конструкции ГАП его как чувствительная к приему и излучению поверхность 1, так и активный элемент 2 подвержены действию силе вызывающей их сжатие, при
23
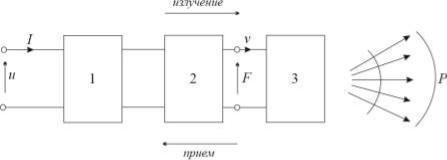
этом, сжатие является односторонним так как внутренняя часть З корпуса 4
была наполнена воздухом при нормальном атмосферном давлении. Для того,
чтобы минимизировать взаимное влияние колебательной системы и корпуса ГАП под приемоизлучающей поверхностью располагается упругая подвеска
5, которая также подвержена сжатью под действием внешней силы. Отсюда следует, что для эффективной работы ГАП его активный элемент должен как можно дольше сохранять свои параметры при воздействии на него внешнего механического давления при его погружении на большие глубины. С этой целью на практике получили широкое распространение компенсированные конструкции. Отличительной особенностью таких конструкций является то что их внутренняя часть 3 заполняется жидкостью или газом не при нормальном атмосферном давлении, а при внешнем гидростатическом, а
также имеет проток для выравнивания давления 6 и компенсатор 7. Т.о.
активный элемент испытывает всестороннее сжатие, в результате чего он изменяет своих свойств.
Основные свойства ГАП
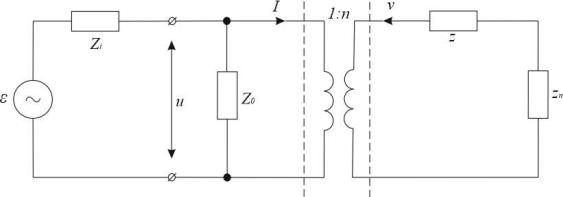
Основные свойства, работающих в режиме приема и/или излучения ГАП можно установить по схеме представленной на рис. 5. Рассмотрим случай работы преобразователя в режиме излучения. Электрическая энергия от источника питания поступает на блок 1, при этом часть этой энергии расходуется на возникновение механические колебаний в блоке 2, который представляет собой активную колебательную систему. Блок 3 излучает часть механических колебаний в виде акустической энергии (звуковой волны).
Рис. 5. Схема ГАП в режиме приема и/или излучения [4]
24
Для работы в режиме приема процессы протекающие в системе ГАП идентичны режиму излучения с той лишь разницей, что протекают в обратной последовательности. Звуковая волна (акустическая энергия), попадая на блок
3 преобразуется в механическую энергию подвижной системы 2, которая порождает в блоке 1 электрическую энергию. Из изложенного выше можно сделать вывод, что в блоке 1 и 2 происходит преобразование электрической энергии в механическую (электромеханическое) и наоборот механической в электрическую (механоэлектрическое). Блок 3 осуществляет преобразование механической энергии в акустическую (механоакустическое) в режиме излучения и акустической энергии в механическую (акустомеханическое) при режиме приема.
Рассмотрим основные параметры ГАП, работающих в режиме излучения [5]:
1.Акустическая мощность Ра — количество акустической энергии,
которая проходит через излучающую часть преобразователя за единицу времени. Единица измерения акустической мощности является Ватт (Вт).
Если отнести излучаемую акустическую мощность к площади излучающей части преобразователя можно рассчитать удельную акустическую мощность
Руд.а единицами измерения которой являются Вт/м2. Акустическая мощность ГАП зависит от частоты, на которой осуществляется излучение энергии.
2.Электроакустический КПД ηэ.а — отношение акустической мощности к электрической мощности Рэ, которая потребляется ГАП от источника электрического напряжения.
3.Импеданс ил полное входное электрическое сопротивление Z.
Является комплексной величиной в результате сдвига фаз между током I и
напряжением U в цепи ГАП и определяется их отношением Z=U/I.
4. Характеристика направленности характеризует угловое или пространственное распределение создаваемого ГАП акустического
(силового) поля.
25

5. Коэффициент осевой концентрации Ко, дает представление о возможности ГАП объединять излучаемую им акустическую энергию в рамках относительно небольшого телесного угла1.
Все приведенные параметры характеризующие работу ГАП зависят от частоты излучения, т.е. являются частотно зависящими функциями.
Теперь рассмотрим основные параметры ГАП, работающих в режиме приема [5]:
1.Чувствительность холостого хода М – характеризует величину вызванного выходного электрического напряжения ГАП при попадании на его принимающую поверхность акустического давления Р величиной в один паскаль (Па), т.е. отношение сгенерированного напряжения преобразователя
квызванному это напряжение звуковому давлению и измеряется в вольтах на паскаль (В/Па). Эффективность работы приемника во многом зависит от частоты.
2.Электрический импеданс Zi, как и в случае излучения является комплексной величиной и определяется отношением напряжения на выходе в цепи ГАП к току.
3.Характеристика направленности характеризует связанность выходного напряжения или чувствительности холостого хода ГАП от направления распространения воздействующей на его принимающую поверхность волны.
4.Коэффициент осевой концентрации Ко, определяет направленные параметры ГАП при воздействии на него звуковых волн со всех направлений и характеризует способность приемника подавлять действующие на него помехи.
Параметры гидроакустических приемников также зависят от частоты,
на которой они работают.
1 Телесный угол – часть пространства, которая является объединением всех лучей, выходящих из данной точки (вершины угла) и пересекающих некоторую поверхность (которая называется поверхностью, стягивающей данный телесный угол) [ГОСТ 32944-2014].
26
Характеристики ГАП, работающих в режиме излучения
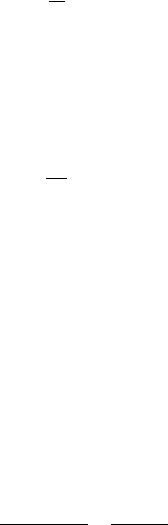
Сопротивления ГАП в режиме излучения. Работу ГАП в режиме излучения рассмотрим при помощи эквивалентной схемы (рис. 6), которая включает в себя последовательно соединенные генератор электрического сигнала, внутреннее сопротивление электрической части ГАП (Zi),
электромеханического трансформатора и сопротивления нагрузки механической части ГАП (zн). Как правило входное сопротивление источника питания имеет малое значение и если при этом Zi принимает высокие значения, то мощность такого ГАП в режиме излучения будет характеризоваться невысокими значениями. Поэтому необходимым условием эффективной работы излучателей является низкое внутреннее сопротивление электрической цепи (Zi), которое принимают равным нули по отношению к zн.
Т.о. чтобы достичь максимально возможной мощности ГАП сопротивление его электрической цепи должно согласовываться с сопротивлением источника электрического сигнала, а для этого необходимо установить значение входного сопротивления (Zвх) электрической части ГАП, которое в свою очередь зависит от выходного сопротивления (zвых) механической части преобразователя.
Рис. 6. Электромеханическая схема излучателя [6]
В случае работы ГАП в режиме излучения при погружении в жидкость,
его выходное сопротивление определяется суммой его активной и реактивной частей:
Zвых= z+ zн= r+ixм, |
(4) |
27
где сопротивление r складывается из сопротивлений механических потерь rп,
которые возникают трении и деформации различных узлах механической части ГАП и активного сопротивления при излучении в среду rs.
Сопротивление хм определяется реактивным сопротивлением ГАП в режиме излучения и пассивного сопротивления массы среды, которая колеблется вместе с излучающей поверхностью преобразователя.
Для определения зависимости входного сопротивления электрической цепи ГАП (Zвх) от выходного сопротивления (zвых) его механической цепи,
необходимо произвести пересчет zвых на электрическую сторону. Для осуществления пересчетов в цепях с наличием трансформатора нужную величину (сопротивление) необходимо умножить на коэффициент трансформации в квадрате, в случае перевода на механическую сторону и разделить при переводе на электрическую сторону. Т.о. перерасчет zвых на электрическую сторону будет выглядеть следующим образом, коэффициент трансформации n равен n=F/u=I/v, а следовательно напряжение и ток в цепи ГАП определяются соотношениями u=F/n и I=nv. Принимая во внимание закон Ома (Z=u/I) и приведенные равенства получаем:
Z=z/n2 |
(5) |
Разделив механическое сопротивление |
z на квадрат коэффициента |
трансформации n2, приведем его к электрической стороне, а умножив электрическое сопротивление Z на n2 приведем его к механической стороне.
Разделив выходное сопротивление цепи ГАП (4) на n2, можно найти
динамическое сопротивление |
|
Zм= Rм+iXм, |
(6) |
где Rм=r/n2, Xм= xм/n2. |
|
Механическое сопротивление пересчитанные на электрическую сторону измеряется, как и любое электрическое сопротивление в Омах.
Электрическое сопротивление Z0 ГАП при отсутствии колебаний на механической стороне, тоже является комплексной величиной. Такое электрическое сопротивление можно рассматривать как параллельно
28

включенные активное сопротивление Ro и реактивное ±iX0, реактивное сопротивление принимает положительное значение в случае индуктивного сопротивления, а отрицательное в случае емкостного. В результате такого рассмотрения схема ГАП работающего в режиме излучения, приведенная к электрической стороне, имеет вид представленный на рис. 7. Сопротивление на входе такого ГАП рассматривается как параллельное включение сопротивлений ±iXo, Ro, Zм.
Рис. 7. Электрическая схема излучателя [6]
Мощность ГАП работающего в режиме излучения. Если на ГАП подать переменное электрическое напряжение u и представить, что реактивное сопротивление на механической стороне равно нулю (хм=0), т.е.
полное сопротивление излучателя минимально, то в этом случае колебания излучающей поверхности ГАП принимают максимальную скорость, другими словами, настает резонанс. Частота колебаний, при которой механическое сопротивление преобразователя обращается нуль (хм=0), называется
частотой механического резонанса.
При равенстве нулю Xм=0 и минимуме полного сопротивления
(ZM=RM) излучателя на частоте резонанса он потребляет от источника электрической энергии мощность э
= 2 |
+ 2 |
= |
+ . |
(7) |
||
э |
0 |
|
|
э.п |
|
|
|
|
|
|
|
||
В приведенном выражении мощность, которая теряется на активном сопротивлении входной электрической цепи в виде тепла, называется
мощностью электрических потерь
29
2
э.п = . (8)
0
Рассмотрим вторую часть выражения (7), для этого представим, что механическая часть излучателя не совершает никаких колебаний
(заторможена), другими словами, выходное активное сопротивление r→∞, в
этом случае в нуль обращаются и сопротивление RM=0 и мощность u2RM=0.
= 2 . (9)
Отсюда следует, что часть потребляемой от источника электрической энергии мощности, которая преобразуется в механическую, расходуется на приведение в движение механической части ГАП. Мощность на выходной стороне ГАП работающего в режиме излучения принято называть механической мощностью.
КПД ГАП в режиме излучения. Пользуясь выражениями (7) и (9),
можно оценить эффективность ГАП в режиме излучения (преобразования входной электрической мощности в механическую на выходе) при помощи электромеханического коэффициента полезного действия ηэм [6]
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
⁄ |
|
|
|
1 |
|
|
|
|
|||
эм = |
= |
|
|
|
2 |
|
|
|
|
|
= |
|
|
. |
(10) |
||||
|
|
|
|
|
|
2 |
|
|
|||||||||||
|
э |
|
|
⁄ |
|
|
+ ⁄ |
|
|
1+ ⁄ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Как уже сказано, выходное активное сопротивление r=rs+rп. Тогда для |
|||||||||||||||||||
динамического активного сопротивления можно записать |
|
||||||||||||||||||
|
|
= |
|
|
+ |
|
п |
= + |
, |
|
|
|
(11) |
||||||
|
|
|
|
|
|
||||||||||||||
|
2 |
2 |
|
|
|
|
м.п |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
здесь Rs – сопротивление излучения, Rм.п – сопротивление механических потерь пересчитанные на электрическую сторону. Тогда активная выходная механическая мощность преобразователя может быть представлена в виде [6]
|
= 2 |
|
+ 2 |
|
. |
(12) |
|||
|
|
2 |
|
|
|
2 |
|
м.п |
|
|
|
|
|
|
|
|
|
|
|
Из выражения (12) видно, что сопротивление излучения Rs будет определять излучаемую акустическую мощность Ра, а сопротивление механических потерь Rм.п будет определять мощность механических потерь
Рм.п..
30