


Уравнения Лагранжа |
92 |
|
|
Задачи
Обязательные задачи
5.1.Стержень, находящийся в плоскости xOy, на котором могут свобод-
но двигаться две материальные точки с массами m1 и m2, соединенные между собой пружиной, вращается вокруг вертикальной оси Oz с постоянной угловой скоростью ω. Написать уравнения связей системы, определить число ее степеней свободы и ввести обобщенные координаты.
[z1 = z2 = 0, x1 sin ωt − y1 cosωt = 0, x2 sin ωt − y2 cosωt = 0; n = 2]
5.2.Найти число степеней свободы n плоского трехзвенного механизма
ABCD, у которого точки A и D могут перемещаться только по оси Ox. Как изменится результат для неплоского механизма?
[n = 3]
5.3. Свободная материальная точка движется под действием силы F(r,v,t) = Fxex + Fyey + Fzez . Найти выражения для обобщенных сил,
если в качестве обобщенных координат выбираются: а) цилиндрические координаты, б) сферические координаты.
|
б) Qr |
= Fx sin θcosϕ + Fy sin θsin ϕ + Fz cos θ, |
||
|
|
|
|
|
|
Qθ = r(Fx cosϕ + Fy sin ϕ)cosθ − rFz sin θ, |
|||
|
Q |
= r sin θ(F cosϕ − F sin ϕ) |
|
|
|
ϕ |
y |
x |
|
5.4.Для сферического маятника длины l и массы m, изображенного на рисунке, с использованием в качестве обобщенных координат сферических углов θ и ϕ найти обобщенные силы Qθ и Qϕ.
5.5.Однородный стержень ОА, вес которого Р, может вращаться вокруг перпендикулярной к нему горизонтальной оси Оz без трения. К

Теоретическая физика. Механика (практический курс) |
93 |
|
|
концу А стержня прикреплена пружина BА, точка B крепления которой находится на оси Оx и отстоит от точки О по вертикали вверх на расстоянии BО = ОА = a. Длина пружины в ненапряженном состоянии равна l0. Используя в качестве обобщенной координаты системы угол ϕ,
который стержень образует с вертикалью, получить выражение соответствующей ему обобщенной силы, полагая, что коэффициент жесткости пружины равен с.
5.6.Две частицы с массами m1 и m2, соединенные между собой жестким стержнем длины l, притягиваются к неподвижной частице массы m по закону всемирного тяготения. Пренебрегая массой стержня, найти обобщенные силы, предполагая, что движение происходит в одной плоскости и
рассматривая в качестве обобщенных координат расстояние r и углы ϕ и ψ.
5.7.Наклонная призма А веса Р движется под действием горизонтальной силы F по гладкой горизонтальной плоскости. Вдоль наклонной плоскости призмы, расположенной под углом
α к горизонту, скользит доска В веса Q. Предполагая, что коэффициент трения доски о наклонную плоскость равен f, выбрать обобщенные координаты системы и определить соответствующие им обобщенные силы.
5.8.Найти обобщенные силы для материальной системы, изображенной на рисунке. Веса грузов А, В и С, соответственно, равны Р1, Р2 и Р3. Грузы А и В переме-
щаются по гладкой горизонтальной поверхности. Стержни длины l невесомы и соединены с грузами А и В и между собой идеальными цилиндрическими шарнирами и вся система движется в одной вер-

Уравнения Лагранжа |
94 |
|
|
тикальной плоскости. Жесткости пружин, действующих на грузы A
иB, равны соответственно с1 и с2.
5.9.Найти функцию Лагранжа плоского маятника длиной l и массы m2 , точка подвеса которого (с массой m1 в ней) может совершать движение по горизонтальной прямой.
|
m1 |
+ m2 & |
2 |
|
m2 |
2 |
&2 |
&& |
|
|
L = |
|
+ |
|
(l |
|
|||||
|
2 |
x |
|
2 |
ϕ |
+ 2lxϕcosϕ) + m2 gl cosϕ |
||||
|
|
|
|
|
|
|
|
|
||
5.10. Показать, |
что |
|
добавление |
к |
функции |
Лагранжа |
||||||
|
|
& |
|
|
& |
|
полной |
производной по |
времени |
|||
L(q1,q2 ,...,qn ,q2 |
,...,qn ,t) |
|||||||||||
df (q ,q ,...,q ,t) |
|
n |
∂f |
|
∂f |
|
|
|
|
|||
1 |
2 |
n |
|
= ∑ |
|
& |
|
от некоторой произвольной функ- |
||||
|
|
|
|
|
|
|||||||
|
dt |
|
|
∂q j |
q j + |
∂t |
||||||
|
|
|
|
j=1 |
|
|
|
|
|
|||
ции |
f (q1,q2 ,...,qn ,t) |
обобщенных координат и времени, не меняет |
||||||||||
уравнений Лагранжа.
5.11. Составить функцию Лагранжа двойного плоского маятника, изображенного на рисунке, состоящего из двух частиц с массами m1 и m2, которые подвешены на нитях длиной l1 и l2 соответственно.
|
& & |
(m1 + m2 ) |
2 |
&2 |
|
m2 |
2 |
&2 |
|
|
L(ϕ1, |
l1 |
+ |
|
l2 |
+ |
|
||||
ϕ2 ,ϕ1,ϕ2 ) = |
2 |
ϕ1 |
2 |
ϕ2 |
||||||
|
|
|
|
|
|
|
|
|
||
& & |
|
|
|
|
|
|
|
|
||
+m2l1l2ϕ1ϕ2 cos(ϕ1 −ϕ2 ) + (m1 |
+ m2 )gl1 cosϕ1 + m2l2 g cosϕ2 |
|||||||||
5.12.Составить функцию Лагранжа системы двух точек с массами m1 и
m2, движущихся в плоскости xOy по прямым, образующим углы π/4 с горизонталью. Предполагать, что на точки действует сила тяжести и что они все время находятся на неизменном расстоянии, равном a, друг от друга.
5.13.Две частицы с массами m1 и m2, связанные пружиной жесткости с, могут двигаться без трения по сторонам прямого угла xOy, сторона Oy которого вертикальна. Длина пружины в ненапряженном состоянии равна l0. Составить уравнения Лагранжа системы.
Теоретическая физика. Механика (практический курс) |
95 |
|
|
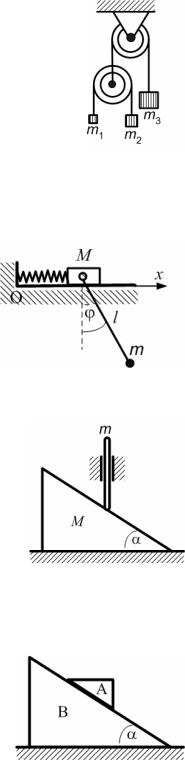
5.14.Через неподвижный блок, массой которого можно пренебречь, перекинута нить, на одном конце которой подвешена гиря массой m3, а на другом конце – невесомый блок. Через этот блок также перекинута нить, на концах которой подвешены гири массами m1 и m2. Предполагая, что трением при движении грузов мож-
но пренебречь, составить уравнения Лагранжа системы и определить ускорение, с которым будет двигаться гиря массой m3.
5.15.Тело массы M, соединенное с пружиной жесткости с, другой конец которой закреплен неподвижно, может двигаться по горизонтальной плоскости вдоль направления оси Ox. К телу прикреплен математический маятник массы m и длины l. Составить уравнения Лагранжа системы.
5.16.Стержень массы m может перемещаться без трения в вертикальной неподвижной муфте. Нижним концом он опирается на гипотенузу абсолютно гладкого клина массы M, который лежит на абсолютно гладкой горизонтальной
плоскости. Вследствие давления на него стержня клин движется горизонтально, а стержень при этом опускается. Используя уравнения Лагранжа, найти законы движения обоих тел.
5.17.Призма А веса Q скользит по гладкой боковой грани призмы В весом Р, образующей угол α с горизонтом. Определить движение обеих призм, предполагая, что трением меж-
ду призмой В и горизонтальной плоскостью можно пренебречь.
|
Qsin 2α |
|
|
|
wB = g |
|
|
|
|
2(P + Qsin |
2 |
|
||
|
|
α) |
||