

Теоретическая физика. Механика (практический курс) |
61 |
||||||
|
|
|
|
|
|
|
|
dσ = |
ρ |
|
dρ |
|
dΩ. |
(4.17) |
|
|
|
||||||
sin θ |
|||||||
|
dθ |
|
|
|
|||
Экспериментальные исследования процессов рассеяния сводятся к измерению потока частиц до рассеяния и количества частиц, рассеиваю-
щихся под разными углами. Тем самым находят сечения рассеяния в лабо-
раторной системе координат. Теоретически эти величины можно найти, вычисляя dσ(θ) в ц-системе, а затем, определяя функции θ(θ1) и θ(θ2 ) из
диаграммы скоростей, основанной на решении (4.11). Дифференциальные
эффективные сечения рассеяния частиц первого и второго пучков в лабораторной системе можно далее получить как результат подстановки:
dσ1 = dσ(θ) θ=θ(θ1) , dσ2 = dσ(θ) θ=θ(θ2 ) .
Примеры решения задач
Задача 1. Две материальные точки массы m1 и m2 взаимодействуют по закону всемирного тяготения. Найти величины началь-
ных скоростей точек, при которых расстояние r0 меж-
ду ними во время движения не будет меняться.
Решение. В соответствии с (4.2) расстояние между точками есть модуль радиус-вектора μ-частицы, и по-
этому μ-частица будет двигаться по круговой траек-
тории. Также, согласно (4.6), будут двигаться и обе материальные точки в системе центра масс, причем они и μ-частица все время будут находиться на одной прямой, как показано на рисунке. Эксцентриситет круговой траектории μ-частицы, обладающей отрицательной полной энергией, в соот-
ветствии с результатами раздела 3 (см. формулу (3.6б)), можно записать в виде
ε = 0 = 1− (2M 2 |
|
E |
|
/ μα2 ), |
(4.18) |
|
|
где Е − есть полная энергия μ-частицы, М − величина ее момента количе-
ства движения, μ − приведенная масса и α − константа взаимодействия в
Проблема двух тел и теория столкновения и рассеяния частиц |
62 |
|
|
потенциале U = −α/ r, которая в данном случае гравитационного взаимодействия равна γm1m2. Из (4.18) для полной энергии Е находим
E = −(μα2 / 2M 2 ) = −(γ2m3m3 |
/ 2(m + m )M 2 ). |
(4.19) |
||
1 |
2 |
1 |
2 |
|
С другой стороны, полная энергия μ-частицы является интегралом движения и равна сумме кинетической и потенциальной энергии. В на-
чальный момент времени для нее будем иметь |
|
|
|
|||||
E = (m m v2 |
/ 2(m + m ) − (γm m / r ). |
(4.20) |
||||||
1 |
2 |
0 |
1 |
2 |
1 |
2 |
0 |
|
Момент количества движения М μ-частицы также интеграл движения и в начальный момент времени для частицы, двигающейся со скоростью v0 по круговой траектории радиуса r0 , для него найдем
M = m1m2r0v0 /(m1 + m2 ). |
(4.21) |
Приравнивая далее величины (4.19) и (4.20), с учетом (4.21) получаем уравнение
v04 −[2γ(m1 + m2 )/ r0 ]v02 + γ2 (m1 + m2 )2 / r02 = 0
для определения начальной скорости μ-частицы. Решая его, находим
v0 = γ(m1 + m2 ) / r0 .
Для начальных скоростей точек в движении, при котором расстояние r0 между ними во время движения не будет меняться в соответствии с
(4.10) получаем
v |
= m v /(m |
+ m ) = m |
γ/(m |
+ m )r |
|
|||||
|
10 |
2 |
0 |
1 |
2 |
2 |
1 |
2 |
0 |
. |
|
|
= m v |
/(m |
+ m ) = m |
γ/(m |
+ m )r |
||||
v |
|
|||||||||
|
20 |
1 |
0 |
1 |
2 |
1 |
1 |
2 |
0 |
|
Задача 2. Частица массы m1 до рассеяния покоится, а частица массы m2 в лабораторной системе координат движется со скоростью v. Определить величины и направления скоростей обеих частиц в лабораторной системе отсчета
после рассеяния как функции угла рассеяния θ в системе центра масс.
Решение. Поскольку скорость первой частицы до рассеяния v1− = 0, а ско-
рость второй частицы v−2 = v, то, согласно (4.9), μ-частица до рассеяния
Теоретическая физика. Механика (практический курс) |
63 |
|
|
двигается со скоростью v− = v−2 − v1− = v. Для скорости центра масс будем
иметь
V = (m v− + m v−) / m = m v / m . |
(4.22) |
||||
1 |
1 |
2 |
2 |
2 |
|
Для скоростей первой и второй частиц до рассеяния в ц-системе найдем
v1′− = −m2v / m, v′2− = m1v / m . |
(4.23) |
После рассеяния частиц их скорости в ц-системе повернутся на угол θ и приобретут вид
v1′+ = −(m2v / m)eθ, v′2+ = (m1v / m)eθ. |
(4.24) |
С учетом (4.22) и в соответствии с (4.11) скорости обеих частиц после рас-
сеяния в лабораторной системе координат будут определяться выражениями
v+ = (m / m)v − (m / m)ve |
θ . |
(4.25) |
||||
1 |
2 |
2 |
/ m)ve |
|
||
v+ = (m |
/ m)v + (m |
θ |
|
|||
2 |
2 |
1 |
|
|
||
Умножая эти векторы скалярно сами на себя и извлекая из скалярных про-
изведений квадратные корни, получим величины скоростей обеих частиц после рассеяния
v+ = (m v / m) |
2 − 2cosθ = 2(m v / m)sin(θ/ 2) |
|
|
|||||
1 |
2 |
|
|
|
2 |
. |
(4.26) |
|
v+ = (v / m) |
m2 + m2 |
+ 2m m cosθ |
||||||
|
|
|||||||
2 |
|
1 |
2 |
1 |
2 |
|
|
|
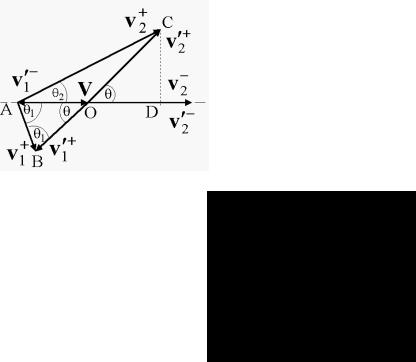
Для нахождения направлений скоростей обеих частиц после рассеяния воспользуемся диаграммой скоростей. Для ее построения (см. рису-
нок) выбираем некоторое направление, скажем горизонтальное, и вдоль
него от некоторой точки О в направлении направо откладываем вектор
скорости второй частицы до рассеяния в ц-сис- теме, в соответствии с (4.23) равный v′2− = m1v / m . Затем вдоль этой же прямой в противоположном направлении от той же точки О проводим вектор скорости первой частицы до рассеяния в ц-системе, в соответствии с
(4.23) равный v1′− = −m2v / m . Эти векторы всегда противоположно направлены, поскольку они выражаются через один и тот же вектор v скорости
Проблема двух тел и теория столкновения и рассеяния частиц |
64 |
|
|
μ-частицы c различными скалярными коэффициентами противоположны-
ми по знаку. В процессе рассеяния вектор v′2− поворачивается на угол рассеяния в ц-системе, не изменяясь по величине, и превращается в вектор v′2+ , поэтому изображаем его повернутым на угол θ, скажем против часо-
вой стрелки. Точно так же ведет себя и вектор v1′− , превращаясь в вектор v1′+ , оба вектора v′2+ и v1′+ , после рассеяния находятся на одной прямой. На рисунке мы изобразили векторы второй частицы большими по величине, допустив, что масса m1 > m2. Эта четверка векторов представляет собой диаграмму скоростей в ц-системе. Для того чтобы построить полную диаграмму скоростей, к ней необходимо присоединить вектор скорости центра масс. Чтобы иметь возможность получить векторы скоростей частиц в л-системе, вектор скорости центра масс следует провести так, чтобы он оканчивался в той точке, в которой начинаются все уже построенные че-
тыре вектора. Характер получаемой диаграммы будет зависеть от распо-
ложения вектора скорости центра масс. Если этот вектор не будет находиться в плоскости диаграммы ц-системы, то результирующая диаграмма будет иметь пространственный вид, если же он окажется в той же плоскости, то диаграмма будет плоской. В нашем случае вектор скорости центра масс, равный согласно (4.22) V = m2v / m, не только находится в плоскости
ц-диаграммы, так он еще и направлен по вектору v′2− , а по величине в точ-
ности совпадает с вектором v1′− . Диаграмма, таким образом, оказывается плоской, а вектор скорости центра масс мы должны провести так, чтобы он начинался в той же точке, в которой кончается вектор v1′− , а оканчивался в
точке О. Теперь для получения векторов скоростей в л-системе складываем вектор скорости центра масс с векторами скоростей частиц в ц-системе. В ча-
стности, добавляя к вектору V вектор v1′− , получаем вектор скорости первой частицы в л-системе v1− , который, как и дано в условии задачи, оказывается
равным нулю. Далее, складывая векторы V и v′2− , получаем вектор скорости второй частицы в л-системе v−2 , который направлен направо по горизон-
тальной прямой. Он начинается в точке А, а конец его совпадает с концом

Теоретическая физика. Механика (практический курс) |
65 |
||||
|
|
|
|
|
|
′− |
. Сложение векторов V |
′+ |
+ |
, а при сложении век- |
|
вектора v2 |
и v1 |
дает вектор v1 |
|||
торов V и v′2+ находим вектор v+2 . Угол θ1 между векторами v1+ и v1− по оп-
ределению является углом рассеяния первой частицы в лабораторной сис-
теме координат, но вектор v1− = 0, поэтому в данной ситуации угол θ1
приходится определять как угол между векторами v1+ и v−2 . Аналогичным образом, угол θ2 между векторами v+2 и v−2 определяет угол рассеяния
второй частицы в л-системе. Для нахождения угла θ1 |
рассмотрим AOB, |
который, в силу равенства сторон OA и OB, является равнобедренным и |
|
угол в его вершине равен θ. Тогда из условия θ+ 2θ1 = π находим |
|
θ1 = (π − θ) / 2. |
(4.27) |
Для определения угла θ2 строим прямоугольный |
ACD, в котором |
нам известна гипотенуза AC = v+ и, кроме того, мы можем, воспользовав- |
||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
′− |
sin θ. Тогда, используя соотноше- |
|||
шись COD, найти в нем катет CD = v2 |
||||||||
ния (4.23) и (4.26), для sin θ2 будем иметь |
|
|
|
|||||
sin θ |
2 |
= m sin θ/ |
m2 |
+ m2 |
+ 2m m cosθ . |
|
(4.28) |
|
|
1 |
1 |
2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
′− |
′− |
cosθ, и то- |
Можно, однако, в ACD вычислить второй катет AD = v1 |
+ v2 |
|||||||
гда для tg θ2 получить более простое выражение |
|
|
||||||
|
tg θ2 = sin θ/((m2 / m1) + cosθ) . |
|
(4.29) |
|||||
В любом случае, соотношения (4.26), (4.27), (4.28) или (4.29) полностью решают поставленную задачу, поскольку дают величины и направления векторов скоростей v1+ и v+2 как функции угла рассеяния θ в системе центра масс.
Задача 3. Частица с зарядом е и массой m, имеющая на бесконечности скорость v , налетает на такую же частицу, первоначально неподвижную, с прицельным расстоянием ρ. Найти скорости обеих частиц после рассеяния, предполагая, что частицы взаимодействуют по закону Кулона.
Проблема двух тел и теория столкновения и рассеяния частиц |
66 |
|
|
Решение. Общее решение для скоростей v1+ и v+2 можно получить сразу, если воспользоваться результатами решения предыдущей задачи. Достаточно лишь в выражения (4.26), (4.29) подставить условие равенства масс частиц: m1 = m2 = m. Имеем тогда
v+ = v sin(θ/ 2), |
θ = (π − θ) / 2, |
|
1 |
1 |
|
v2+ = v cos(θ/ 2), |
tg θ2 = tg(θ/ 2) . |
(4.30) |
Из этих уравнений видим, что частицы после рассеяния двигаются под прямым углом друг к другу. Для нахождения связи между углом θ и прицельным расстоянием ρ вычислим интеграл, определяющий угол ϕ, подставив в (4.13) потенциал кулоновского взаимодействия U(r) = e2/r и учитывая, что приведенная масса μ для двух частиц одинаковой массы m равна m/2. Имеем
|
|
|
∞ |
|
|
ρ |
|
|
|
|
|
dr |
|
|
|
|
|
|
||||||||
|
ϕ = ∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|||
|
r |
2 |
|
|
|
|
|
|
|
4e2 |
ρ2 |
|
|
|
||||||||||||
|
|
rmin |
|
|
|
|
1− |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− r2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
mrv2 |
|
|
|
|
|||||||||||
Вводя новую переменную η = |
|
ρ |
+ |
|
2e2 |
|
|
, для радикала найдем |
|
|
||||||||||||||||
|
r |
mρv2 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
4e2 |
|
|
|
|
ρ2 |
|
|
|
|
|
|
|
|
4e4 |
2 |
|
|
|
|||||||
1− |
|
− r2 |
= |
|
1+ |
|
− η . |
|
|
|
||||||||||||||||
mrv2 |
|
m2ρ2v4 |
|
|
|
|||||||||||||||||||||
Дифференциал – dη = − |
ρ |
dr . |
|
|
|
Еще |
|
|
раз меняя |
переменную |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
dε |
|
|
ε = η/ 1+ (4e4 / m2ρ2v4 ) , интеграл сведем к виду ϕ = − ∫ |
|
. Интегри- |
||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
1− ε2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
min |
|
|
|
|
|
ρ |
+ |
|
|
|
2e2 |
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
руя, находим ϕ = arccos |
r |
|
mρv2 |
|
|
|
|
|
. Если значение угла ϕ при r = rmin |
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
1+ |
|
|
|
4e4 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
m2ρ2v4 |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
min |
|
|
|
|
|
|
|
|
|
|
принять за начало отсчета угла ϕ и положить его равным нулю, то будем