

Строительные и дорожные машины. Основы автоматизации
.pdf414
Подвижный якорь электромагнитных реле обычно замыкает не один контакт, а несколько (до 25). Поэтому реле используют не только как усилители, но
икак элементы управления, позволяющие дать питание одновременно не-
скольким электрическим цепям или отключать их, т. е. размножить сигнал. В зависимости от того, реагирует ли реле на направление тока или нет, различают нейтральные и поляризованные электромагнитные реле.
В нейтральном реле (см. рис. 10. 24, а) при подаче на вход постоянного тока магнитный поток в сердечнике 1 возрастает; якорь 2 притягивается к нему и, преодолевая усилие пружины 3, замыкает контакты 4. При изменении направления тока в катушке магнитный поток меняется и в сердечнике, и в якоре, а взаимодействие их не нарушается (т. е. они опять притягиваются друг к другу). Благодаря этому реле можно использовать на переменном токе. Однако в тот момент, когда значение синусоидального тока проходит через нуль, сила электромагнита также равна нулю, и под действием пружины 3 якорь отходит от сердечника. Для устранения дребезжания в сердечнике делают короткозамкнутый медный виток 5, который раздваивает магнитный поток в нем и смещает один поток относительно другого по фазе.
Поляризованное реле (см. рис. 10.24, б) чувствительно к изменению направления тока на входе. Это достигается введением в цепь магнитопровода постоянного магнита. Магнитный поток его раздваивается на Ф1 и Ф2. Поток Ф1 складывается с потоком, который создает ток управления Фу, а потоки Ф2 и Фу имеют разные знаки. Благодаря этому в левом кольце магнитный поток больше, чем в правом, и якорь 2, преодолевая сопротивление пружины 3', притягивается к левой части сердечника 1 и замыкает контакт 4. При изменении направления тока в обмотках управления якорь притягивается к правой части сердечника и замыкает контакт 4'. Пружины 3 и 3' удерживают якорь в нейтральном положении при отсутствии тока на входе, т. е. реле становится трехпозиционным. При отсутствии пружин прекращение тока на входе оставило бы замкнутым тот контакт, который был замкнут, т. е. реле имело бы только два положения и было бы двухпозиционным. Иногда один из контактов смещают за нейтральную ось в сторону другого контакта (настройка контактов с «преобладанием»). Тогда при отсутствии тока замкнут всегда только один контакт.
По назначению различают две группы электромеханических реле: реле напряжения и токовые реле. Электронные и магнитные усилители. Электронные усилители служат для увеличения постоянного или переменного напряжения и силы тока. При этом обязательно происходит усиление мощности сигнала. Путем изменения сопротивления в цепи можно получить высокое напряжение при низкой силе тока или, наоборот, низкое напряжение при большом токе.
Основным элементом в электронном усилителе является полупроводниковый триод. Небольшое изменение напряжения (входной сигнал) преобразуется триодом в значительные изменения проходящего через него тока.
Магнитные усилители МУ являются ферромагнитными устройствами, предназначенными для увеличения мощности нагрузки при относительно ма-
415
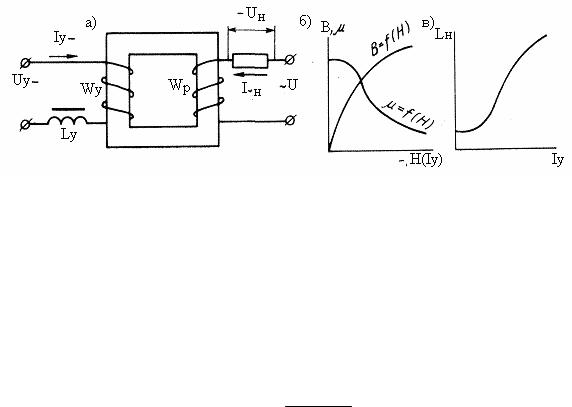
лой мощности управления. МУ отличаются от других типов электрических усилителей своей надежностью, большой механической прочностью, простотой конструкции, удобством эксплуатации и практически неограниченным сроком службы. В отличие от электронных усилителей, у которых управляемыми элементами служат электровакуумные или полупроводниковые приборы, в МУ роль управляемых элементов выполняют катушки индуктивности с ферромагнитными сердечниками. Изменение индуктивности катушки зависит от величины подмагничивающего тока, создаваемого управляющим сигналом. Схема простейшего МУ (дроссель с подмагничиванием) показана на рис. 10.25.
Рис. I0.25. Принцип действия магнитного усилителя а) − электрическая схема; б) − зависимость В, p = f(H); в) − зависимость I~y = f/(Iу)
Вэтом усилителе на ферромагнитный сердечник нанесены две обмотки: Wу
–управляющая обмотка; Wp – рабочая обмотка, или обмотка переменного тока. На управляющую обмотку подается управляющий сигнал Uу, подлежащий усилению. Последовательно с рабочей обмоткой включена нагрузка RH, которая является выходом магнитного усилителя Uн. Рабочая обмотка Wp питается от источника напряжения переменного тока ~U. Дроссель Ly с большим индуктивным сопротивлением включен последовательно с обмоткой управления. Ток в рабочей цепи (цепи нагрузки)
IH U
 X p2 R2 ,
X p2 R2 ,
где R = RH + Rp – полное активное сопротивление нагрузки и рабочей обмотки Wp; Xp – индуктивное сопротивление рабочей обмотки:
Х р Lp ,
причем 2 f – угловая частота; Lp – индуктивность рабочей обмотки:
Lp Wp2Sc /lcp ,
здесь Se – площадь поперечного сечения |
сердечника, м2; lср – средняя длина |
пути магнитного потока в сердечнике , м; |
магнитная проницаемость мате- |
риала сердечника, Г/м.
Так как Wp, Sc и lср величины постоянные, то, очевидно, изменять значение индуктивности рабочей обмотки Lp, а следовательно Хр, можно лишь путем изменения проницаемости материала сердечника. В качестве материалов для сердечников МУ применяются сплавы железокремниевые, железоникелевые и
416
оксидные ферромагнетики (ферриты). В таких материалах магнитная проницаемость в сильной степени зависит от величины напряженности Н , подмагничивающего поля = f (Н) (рис. I0.25, б).
Таким образом, если в управляющую обмотку WY подать постоянный ток Iу, то он в сердечнике создаст постоянный магнитный поток, который будет накладываться на переменный магнитный поток, созданный обмоткой Wр. С возрастанием Iр вследствие нелинейности кривой намагничивания увеличивается насыщение сердечника. Это приводит к уменьшению , а следовательно и Ln, и ток в рабочей цепи I~п возрастает (рис. I0.25, в). Таким образом, подмагничивая сердечник постоянным током, можно управлять индуктивностью рабочей обмотки Lp, а следовательно, и переменным током в этой цепи.
10.4. Счетно-решающие устройства
Счетчики импульсов – это устройства для отсчета и запоминания количества электрических импульсов, пришедших на его вход за некоторый интервал времени. Они могут применяться для отсчета частоты вращения как частотомеры, датчики интервалов времени, декодирующие элементы, а также в качестве узлов различных синхронизирующих и управляющих устройств.
Различают два режима работы счетчиков импульсов: 1) в качестве измерительного устройства, обеспечивающего снятие (чтение) показаний в любой нужный момент; 2) в качестве делителя частоты импульсов, т. е. устройства, на выходе которого появляется сигнал по прошествии определенного числа К импульсов на входе. Число К в этом случае называется коэффициентом пересчета. В измерительной и вычислительной технике делители частоты называются
пересчетными схемами, а в автоматике – реле счета импульсов.
Счетчики импульсов можно классифицировать по разрешающему времени, т. е. по минимальному времени между двумя импульсами. Разрешающее время зависит от типа счетчика: электромеханический 0,1…0,03 с, электронный на газоразрядных приборах 10-4… 5∙10-6 с, электронный на вакуумных лампах 5∙10-6 … 10-7 с, электронный на полупроводниковых приборах 10-24 … 10-6 с.
Электромеханические счетчики импульсов представляют собой разновидность электромагнитного реле, якорь которого приводит в движение храповик, а ось храповика связана со счетным механизмом. В качестве счетчика импульсов широко применяются шаговые искатели.
В основе электронных счетчиков импульсов лежит триггер — устройство, имеющее два устойчивых положения. Как правило, в таких приборах счет производится в двоичной системе с последующей дешифрацией. Триггеры соединяются между собой через дифференцирующие RС-цепочки и диоды, необходимые для выделения на соответствующих анодах стартовых импульсов нужной полярности.
Построение логических операций и их реализация. Назначение логических устройств систем промышленной автоматики состоит в управлении выходными
417
устройствами в соответствии с состоянием входных устройств (датчиков) по определенному алгоритму (предписанию, определяющему содержание и последовательность операций, переводящих исходные данные в искомый результат).
В релейно-контактной технике осуществление события (обозначается 1) связано с понятием замкнутого контакта, а неосуществление (обозначается 0) – с понятием разомкнутого контакта. В системах бесконтактной техники осуществление события связано с наличием сигнала, а неосуществление – с отсутствием сигнала на выходе логического устройства.
С переменными событиями 1 и 0 (есть сигнал – нет сигнала) можно производить операции «сложение», «умножение» и «отрицание».
Логическая операция сложения обозначается знаком + либо символом V или U. Логическое сложение отличается от обычного тем, что при сложении двух или более единиц в результате также получается единица. Это означает, что при наличии любого из нескольких сигналов на входе устройства на выходе будет сигнал. Аналогом сложения в релейно-контактной технике может служить параллельное включение замыкающих контактов. Эта логическая операция реализует функцию «ИЛИ».
Логическое умножение обозначается (•) или ( , &). Точка иногда опускается. Логическое умножение не отличается от алгебраического. Аналогом умножения в релейно-контактной технике может служить последовательное включение замыкающихся контактов. Эта логическая операция реализует функцию
«И».
Операция «отрицание» или «инверсия» обозначается (–) и означает, что переменная принимает другое противоположное значение. Инверсия единицы (1) означает ноль (0), т. е. 1 = 0, 0 = 1.
Все эти операции изучаются алгеброй логики. Так же, как и в обычной алгебре, в алгебре логики имеют дело с переменными
(Х1, ,X2 ,X3,...,Xn),
но эти переменные могут иметь только два значения (1 и 0). Если переменная имеет значение 1, то она обозначается X1 Х2, ..., Хп, а если имеет значение 0, то X1,Х2, ..., Хп (имеет место «отрицание»). В этом случае переменная читается НЕ х (не ИКС).
Если на входе логического устройства имеется несколько переменных Х1,Х2,
..., Хп и это устройство реализует какие-либо логические операции, то на выходе его получим логическую функцию У. Логическая функция является результатом выполнения определенных логических операций над аргументами (переменными). Функция так же, как и аргументы, может принимать только два значения: 0, 1.
Ниже приводятся основные тождества и законы алгебры логики (без доказательства):
1)Х + Х= 1; 2) X∙X = 0; 3) X + 1 = 1; 4) X∙1 = X; 5) X = X;
6)Х1(Х2 + Х3 )=(Х1Х2 +Х1Х3 ); 7) Х1Х2 = Х2Х1;
8) Х2 + Х1 = Х1 + Х2; 9) (Х1 + Х2)+ Х3 = Х1 + (Х2 + Хз);

418
10)(Х1Х2)Х3= Х1, (Х2Хз); 11) Х1 + Х2 +... + Хп = = Х1 ∙ Хг ∙ ... Хп;
12)Х1 ∙ Х2 ∙ ... . Хп = Х1 + Х2 + ... + Хп.
Для реализации логических операций могут быть использованы релейноконтактные устройства, полупроводниковые элементы, магнитные логические элементы. Наиболее широкое распространение в промышленности в последнее время находят полупроводниковые элементы. Для реализации различных алгоритмов управления необходимо иметь такой набор логических элементов, чтобы при его помощи можно было реализовать любую логическую функцию. Для полупроводниковых элементов наиболее целесообразно иметь набор из двух элементов: универсального «ИЛИ — НЕ» и диодной приставки, показанных на рис. 10.26. При подаче сигнала на любой из входов схемы «ИЛИ» на выходе появляется сигнал. Для получения сигнала на выходе элемента «И» необходимо подать сигнал на все входы схемы. В этом случае все диоды будут «заперты» и на выходе будет 1. Тиристорный элемент «ИЛИ — НЕ» представляет собой (см. рис. 10.26, в) транзисторный инвертор с тремя входами, выполненными на сопротивлениях.
При сигнале 0 на всех входах транзистор закрыт, а на выходе имеется отрицательный потенциал (сигнал 1). При подаче хотя бы на один из входов сигнала 1 транзистор открывается и сигнал на выходе становится равным 0.
Рис. 10.26. Логические элементы а)−диодный элемент «ИЛИ»; б) − диодный элемент «И»; в) − реостатно-
транзисторный элемент «ИЛИ − НЕ»
Коллекторное сопротивление RK используется при работе с другими элементами. Реализация некоторых функций с помощью элемента «ИЛИ— НЕ» приведена на рис. 10.27, а.
Классификация измерительных схем. Полученная с первичных преобразователей (датчиков) информация должна быть соответствующим образом переработана. Одной из задач такой переработки является определение величины полученного сигнала — измерение его, т. е. сравнение с эталоном. Роль таких элементов выполняют измерительные схемы.

419
Рис. 10.27. Реализация некоторых функций с помощью элемента «ИЛИ — НЕ» а) − функция «ЗАПРЕТ»; б) − функция «ПАМЯТЬ
В автоматических системах наиболее широко применяются устройства с одним из трех видов измерительных схем: мостовые, компенсационные и диффе- ренциально-трансформаторные. Конкретный вид схемы определяется примененным первичным преобразователем.
Все три вида схем построены по методу сравнения, характеризующемуся наличием двух цепочек последовательных преобразований, в одну из которых включен рабочий преобразователь, а в другую — образцовый. Звено сравнения (общее для обоих преобразователей) выдает сигнал разности эталона и фактического значения.
Компенсационные схемы измерения. Компенсационные схемы применяются для измерения сигналов, полученных с преобразователей в виде изменения напряжения. В основе работы компенсационных схем лежит метод сравнения. Характерной чертой этих схем является высокая точность измерения.
Применяемые в автоматических системах компенсационные устройства выполняются с автоматическим уравновешиванием. Эти устройства называются
автоматическими потенциометрами (компенсаторами) постоянного или пе-
ременного тока.
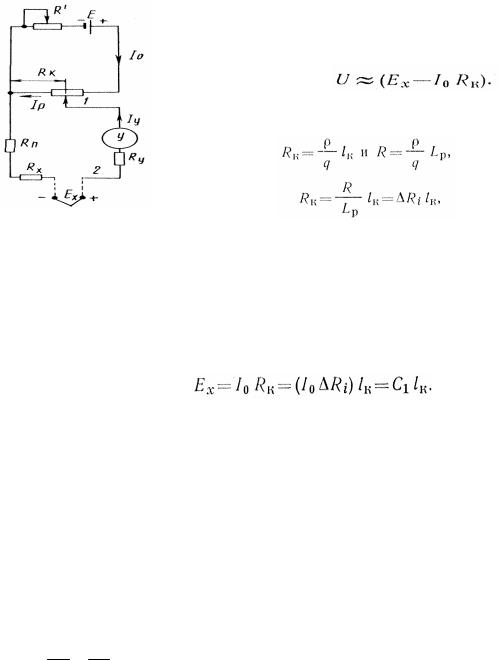
На рис. 10.28 изображена принципиальная электрическая компенсационная схема, на вход которой для измерения подается электродвижущая сила Ех, создаваемая, например, термопарой.
Пусть Rx– сопротивление источника электродвижущей силы, Ом; U – напря-
жение на приборе-указателе, В; Iу – ток в |
цепи прибора-указателя равно- |
весия, А (Iу = 0); Ех – определяемая электродвижущая сила, В; Rу — сопро- |
|
тивление прибора-указателя, Ом; RK – часть |
сопротивления реохорда, Ом; Rn |
– сопротивление проводов, Ом; Е – электродвижущая сила источника, В; R' – сопротивление цепи питания, Ом. Измеряемая Ех прикладывается к сопротивлению Rу прибора-указателя и к сопротивлению (RK + Rn). Чтобы скомпенсировать падение напряжения на этих участках из условий Iy 0, необходимо
передвинуть реохорд таким образом, чтобы разность потенциалов между точками 1 и 2 была равна нулю. Это возможно при условии, если на части сопро-
420
тивления реохорда Rk падение напряжения Uk IoRk скомпенсировало изме-
ряемую Ex .
По законам Кирхгофа
Iр = Iу + I0,
Ех = Iу (Rу + Rx+Rп) + Iр RK = Iу (Rу + Rx + Rк+Rп)+I0 Rк ,
откуда:
Так как сопротивление прибора Ry значительно больше сопротивлений Rx, RK, Rn, то можно принять
силы в цепи реохорда имеем Ех = Ux = I0Rк, и поэтому напряжение на указателе и ток в нем равны нулю.
где – удельное сопротивление, Ом∙м; q– сечение намотки реохорда, м2; Lр – полная длина намотки реохорда, м; R – сопротивление реохорда, Ом; Iк –
длина намотки реохорда, м, соответствующая компенсирующему сопротивлению Rк; Ri– величина сопротивления реохорда, Ом, приходящаяся на единицу длины намотки реохорда.
Отсюда следует
Другими словами, линейное перемещение движка реохорда пропорционально измеряемой электродвижущей силе.
Компенсационные измерительные схемы постоянного тока имеют питание от сухих элементов, требующих периодического контроля и регулирования величины тока I0 с помощью сопротивления R' и специальной схемы, не приведенной на рисунке.
Измерительный мост. Мостовые схемы применяются в устройствах, где измеряемая величина при помощи датчика преобразуется в изменение активного или реактивного сопротивления. В основу мостовых схем (рис. 10.29) положена схема моста Уитсона – способ соединения сопротивлений. Принцип действия моста основан на том, что при равенство отношений сопротивлений в плечах
моста R1 R2 в диагонали моста нет тока. На этом принципе основаны мосто-
R4 R3
вые измерения. Источниками питания мостовых схем могут служить источники напряжения как постоянного, так и переменного тока, причем уравновешивание моста не зависит от колебаний напряжения источника питания.

421
Рис. 10.29. Схема моста постоянного тока Ri—R4− сопротивления в плечах, моста; E − источник питания
На рис. 10.30 приведена схема равновесного моста, для которого разность потенциалов в диагонали с измерительным прибором НГ равна нулю. Для этого случая
где R — сопротивления в соответствующих плечах моста, Ом, откуда
Равновесное состояние может быть достигнуто за счет изменения сопротивления R3.
Для устранения источника погрешностей – неопределенное сопротивление в контактах реостата Rs, это сопротивление вводится в диагональ моста (рис. 10.30, б). Мост уравновешивают в этом случае уменьшением соотношения сопротивлений двух смежных плеч.
Для устранения влияния сопротивления соедини - тельных проводов часто применяют трехпроводную схему включения. В этом случае соединительные провода ab, cd оказываются включенными в разные плечи моста.
Колебания напряжения питания практически не сказываются на показания моста при отношениях ±20%, причем с увеличением напряжения питания повышается чувствительность мостовой схемы.
На рис. 10.31 показана схема неуравновешенного Рис.10. 30. Равновесный мост:
моста, три плеча которого R1, R2 и R3 имеют а) – обычная схема; б)–трехпровод-
равное постоянное сопротивление, а четвертое плечо ная
является функцией сопротивления датчика. Между сопротивлением Rx и силой тока в диагонали CD существует определенная зависимость. Измеряемая физическая величина вызывает изменение сопротивления датчика, которое определяется по величине тока в измерительной диагонали моста. Измеритель может быть отградуирован в единицах физической величины. Неуравновешенные мосты (рис.10.31) удобно применять для частых измерений степени отклонения

422
измеряемой величины от заданного значения, однако показания прибора зависят от напряжения питания
моста. Для контроля его имеется сопротивление RK, которое может быть вклю-
чено вместо Rx. |
Логометр (рис. 10.32) работает, как и все |
|
мостовые схемы, с датчиком сопротивления. |
|
Это прибор магнитоэлектрической системы, |
|
характерной особенностью которого является |
|
наличие подвижной системы из двух жестко |
|
связанных и скрещенных рамок обмоток. Эти |
|
рамки поворачиваются на общей оси в нерав- |
|
номерном магнитном поле. |
|
К рамкам подводится ток с помощью спе- |
Рис.10.31. Неуравновшанный мост циальных спиралей. Токи и моменты рамок, об мотки которых являются плечами моста, направлены в противоположные стороны. Если моменты рамок равны друг другу, то подвижная система находится в равновесии:
Rp+ R = Rp+ Rt + Rnp; J1 = J2,
и, следовательно, при симметричном положении рамок J1 = J2, где R – сопротивление, Ом; I – токи в рамках, А; J – моменты инерции в рамках, кг∙м2.
При изменении Rx подвижная система поворачивается
– рамка с более сильным током попадает в область слабого магнитного поля, вторая рамка попадает в область более сильного поля, вызывая изменение моментов J1 и J2.
Новое состояние равновесия подвижной системы наступит при Jx = J2, а угол отклонения стрелки логометра зависит от величины Rx.
В логометре оба действующих вращающихся моме- Рис.10.32.Схема логометра нта исчезают при включении тока, поэтому при отсутвии специальных устройств стрелка логометра будет оставаться в том положении, в котором застало ее отклонение, и может соз-
даться неправильное представление о работе прибора.
Дифференциально-трансформаторные системы дистанционной передачи.
Дифференциально-трансформаторные измерительные системы применяются в устройствах, где измеряемая величина преобразуется в линейные перемещения (перемещения плунжера индукционной катушки). Такие системы работают по нулевому методу (рис. 10.33). Для передачи информации с датчика служат две индукционные катушки, состоящие каждая из первичной и вторичной обмоток, намотанных на общий каркас. Вторичная обмотка в свою очередь состоит из двух секций, включенных навстречу друг другу. Внутри катушки перемещается стальной плунжер. Первичные обмотки соединены последовательно и питаются от электронного усилителя. Вторичные обмотки соединены по диф- ференциально-трансформаторной схеме с выходом на электронный усилитель. Концы вторичных обмоток К в каждой катушке соединены между собой.

423
Рис. 10.33. Схема дифференциально-трансформаторной измерительной системы ЭУ − электронный усилитель; КД − катушка датчика; КП − катушка приемника;
Д − датчик; К, И − конец, начало обмоток
Начало Н одной вторичной обмотки катушки датчика соединено с началом обмотки катушки вторичного прибора. Начала других вторичных обмоток катушек датчика и приемника подключаются к входным зажимам электронного усилителя ЗУ.
При протекании тока в первичных катушках во вторичных индуктируется электродвижущая сила (э д с), величина и фаза которой зависит от положения плунжера. Если плунжер находится в среднем положении, то э д с, индуктируемые в каждой из секций вторичной обмотки, равны и направлены навстречу друг другу; их разность равна нулю. Если плунжер смещен от нейтрального положения, то на выходе катушки появляется э д с, равная разности э д с, индуктируемых током первичной обмотки в двух секциях вторичной обмотки. Имеющаяся на выходе катушки датчика разность э д с (U1 = е1 – е2) уравновешивается такой же по величине разностью э д с (U2 =е3 –е4), снимаемой с катушки вторичного прибора, а напряжение на входе электронного усилителя будет равно нулю, если плунжер катушки вторичного прибора КП смещен от нейтрального положения на такую же величину, как и плунжер катушки датчика
KD.
При изменении измеряемой величины плунжер катушки датчика под действием измерительного устройства D (например, сильфон) перемещается, что приводит к изменению разности э. д. с. его вторичных обмоток. В цепи вторичных катушек будет протекать ток, а на входе усилителя появится напряжение небаланса. Усиленное напряжение небаланса подается на управляющую обмотку реверсивного двигателя, который перемещает плунжер катушки прибора в сторону уменьшения напряжения небаланса. Перемещение плунжера вторичного прибора прекратится тогда, когда он займет положение, соответствующее положению плунжера датчика. При этом э д с выхода катушки вторичного прибора будет равна по величине и противоположна по направлению э д с катушки датчика; напряжение небаланса на входе усилителя исчезнет, и двигатель остановится.