

3889
.pdfНаучный журнал строительства и архитектуры
Синтез соолигомеров на основе димера бутадиена — ВЦГ — в присутствии радикальных инициаторов не требует специального оборудования, поэтому организация производства ДБММА-50 на действующем оборудовании любого завода по производству синтетического каучука не представляет особых затруднений.
2.Опытный олигомер ДБММА-50 получен с использованием отходов производства бутадиенового каучука. До настоящего времени практически приемлемых решений по использованию этого отхода не имеется и не ожидается. Поэтому в условиях экономии сырьевых ресурсов предлагаемое техническое решение имеет большую практическую значимость, так как способствует как повышению экономических показателей, так и решению экологических проблем.
3.Показан эффективный состав модифицированного покрытия и его физикохимические свойства. Установлены оптимальные соотношения ингредиентов и предложен механизм модифицирующего влияния акрилового олигомера на исходный состав антикоррозионного покрытия. Предложены рецептурно-технологические приемы квалифицированного повышения свойств антикоррозионных композиционных материалов на основе вторичного полимерного сырья.
Библиографический список
1.Аскадский, А. А. Лекции по физико-химии полимеров / А. А. Аскадский. — М.: Физический факультет МГУ им. М. В. Ломоносова, 2001. — 222 с.
2.Виноградова, С. В.Поликонденсационные процессы и полимеры / С. В. Виноградова, В. А. Васнев. — СПб.: Наука, 2000. — 624 с.
3.Журавлева, И. И. Высокомолекулярные соединения. Ч. VI. Синтетические полимеры / И. И. Журавлева, В. А. Акопьян. — Самара: Самарский университет, 2014. — 528 с.
4.Иржак, В. И. Кинетика отверждения олигомеров / В. И. Иржак, С. М. Межиковский // Успехи химии. — 2008. — Т. 77, № 1. — С. 78—103.
5.Козлов, Д. Ю. Антикоррозионная защита / Д. Ю. Козлов. — Екатеринбург: ИД «Оригами», 2013. —
440 с.
6.Королев, Г. В. Ассоциация жидких органических соединений: влияние на физические свойства и полимеризационные процессы / Г. В. Королев, М. М. Могилевич, А. А. Ильин. — М.: Мир, 2002. — 264 с.
7.Коррозия и защита от коррозии / И. В. Семенова [и др.]. — М.: Физматлит, 2002. — 335 с.
8.Курбатов, В. Г. Противокоррозионные пигменты и наполнители с оболочкой из полианилина / В. Г. Курбатов, А. А. Ильин, Е. А Индейкин // ЛКМ и их применение. — 2012. — № 11. — C. 49—52.
9.Межиковский, С. М. Олигомерное состояние вещества / С. М. Межиковский, А. М. Аринштейн, Р. Я. Дебердеев. — М.: Наука, 2005. — 254 с.
10. Межиковский, С. М. Химическая физика отверждения олигомеров / С. М. Межиковский, В. И. Иржак. — М.: Наука, 2008. — 270 с.
11.Москвичев, Ю. А. Химия в нашей жизни (продукты органического синтеза и их применение) / Ю. А. Москвичев, В. Ш. Фельдблюм. — Ярославль: Изд-во ЯГТУ, 2007. — 411 с.
12.Новый справочник химика и технолога. Основные свойства неорганических, органических и элементоорганических соединений. — СПб: Мир и Семья, 2002. — 1280 с.
13.Полимерные композиционные материалы: прочность и технология / С. Л. Баженов [и др.]. — Долгопрудный: Интеллект, 2010. — 352 с.
14. Полимерные композиционные материалы: структура, свойства, технология / М. Л. Кербер, В. М. Виноградов, Г. С. Головкин [и др.]; под ред. А. А. Берлина. — СПб.: Профессия, 2009. — 560 с.
15.Семчиков, Ю. Д. Высокомолекулярные соединения / Ю. Д. Семчиков. — 3-е изд. — М: Академия, 2006. — 368 с.
16.Сополимеры на основе кубовых остатков ректификации стирола — модификаторы древесины / С. С. Никулин, И. А. Сахокия, А. И. Дмитренков [и др.] // Известия вузов. Лесной журнал. — 2002. —№ 2. —С. 78—86.
17.Тагер, А. А. Физико-химия полимеров / А. А. Тагер. — М.: Научный мир, 2007. — 576 с.
18.Технология полимерных материалов / А. Ф. Николаев, В. К. Крыжановский, В. В. Бурлов [и др.]. — СПб.: Профессия, 2008. — 544 с.
19. |
Филимонова, О. Н. Переработка и применение кубовых |
остатков ректификации стирола / |
О. Н. Филимонова // Успехи современного естествознания. — 2010. — № |
2. — С. 115—117. |
|
20. |
Bayramoglu G. Synthesis and characterization of UV-curable dual hybrid oligomers based on epoxy acry- |
|
late containing pendant alkoxysilane groups / G. Bayramoglu, M. Vezir K. Nilhan, K. Apohan, A. Güngör // Progress in Organic Coatings. — 2006. — Vol. 57, № 1. — P. 50—55.
70
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
21.Mathew, A. M. Styrene butadiene co-polymer based conducting polymer composite as an effective corro-
sion protective coating / A. M. Mathew, P. Predeep // Progress in Organic Coatings. — 2012. — Vol. 1, № 7. — P. 174—181.
22.Ozyilmaz, A. T. Polyaniline, poly (N-methylaniline) and poly (aniline-co-N-methylaniline) coatings on
stainless steel / A. T. Ozyilmaz, A. Akdag // Transactions of the Institute of Metal Finishing. — 2011. — Vol. 4,
№89. — P. 203—215.
23.Shi, H. Hydrophobic Waterborne Epoxy Coating Modified by Low Concentrations of Fluorinated Reactive Modifier / H. Shi, W. Liu, M. Yang, Zh. Wang // Macromolecular Research. — 2019. — Vol. 4, № 27. — P. 145—157.
24.Xie, Y. A novel approach to fabricate polyacrylate modified graphene oxide for improving the corrosion resistance of epoxy coatings. (February 2020) /Y. Xie, Ch. Liu, W. Liu, M. Yang // Colloids and Surfaces a Physicochemical and Engineering Aspects. — DOI: 10.1016/j.colsurfa.2020.124627.
25.Xu, Y. Corrosion and fouling behaviors of phosphatized Q235 carbon steel coated with fluorinated polysiloxane coating / Y. Xu, M. Li, M. Liu // Progress in Organic Coatings. — 2016. — Vol. 57, № 34. — P. 177— 188.
References
1.Askadskii, A. A. Lektsii po fiziko-khimii polimerov / A. A. Askadskii. — M.: Fizicheskii fakul'tet MGU im. M. V. Lomonosova, 2001. — 222 s.
2.Vinogradova, S. V. Polikondensatsionnye protsessy i polimery / S. V. Vinogradova, V. A. Vasnev. — SPb.: Nauka, 2000. — 624 s.
3.Zhuravleva, I. I. Vysokomolekulyarnye soedineniya. Ch. VI. Sinteticheskie polimery / I. I. Zhuravleva, V. A. Akop'yan. — Samara: Samarskii universitet, 2014. — 528 s.
4.Irzhak, V. I. Kinetika otverzhdeniya oligomerov / V. I. Irzhak, S. M. Mezhikovskii // Uspekhi khimii. — 2008. — T. 77, № 1. — S. 78—103.
5.Kozlov, D. Yu. Antikorrozionnaya zashchita / D. Yu. Kozlov. — Ekaterinburg: ID «Origami», 2013. —
440 s.
6.Korolev, G. V. Assotsiatsiya zhidkikh organicheskikh soedinenii: vliyanie na fizicheskie svoistva i polimerizatsionnye protsessy / G. V. Korolev, M. M. Mogilevich, A. A. Il'in. — M.: Mir, 2002. — 264 s.
7.Korroziya i zashchita ot korrozii / I. V. Semenova [i dr.]. — M.: Fizmatlit, 2002. — 335 s.
8.Kurbatov, V. G. Protivokorrozionnye pigmenty i napolniteli s obolochkoi iz polianilina / V. G. Kurbatov, A. A. Il'in, E. A Indeikin // LKM i ikh primenenie. — 2012. — № 11. — C. 49—52.
9.Mezhikovskii, S. M. Oligomernoe sostoyanie veshchestva / S. M. Mezhikovskii, A. M. Arinshtein, R. Ya. Deberdeev. — M.: Nauka, 2005. — 254 s.
10.Mezhikovskii, S. M. Khimicheskaya fizika otverzhdeniya oligomerov / S. M. Mezhikovskii, V. I. Irzhak. — M.: Nauka, 2008. — 270 s.
11.Moskvichev, Yu. A. Khimiya v nashei zhizni (produkty organicheskogo sinteza i ikh primenenie) / Yu. A. Moskvichev, V. Sh. Fel'dblyum. — Yaroslavl': Izd-vo YaGTU, 2007. — 411 s.
12.Novyi spravochnik khimika i tekhnologa. Osnovnye svoistva neorganicheskikh, organicheskikh i elementoorganicheskikh soedinenii. — SPb: Mir i Sem'ya, 2002. — 1280 s.
13.Polimernye kompozitsionnye materialy: prochnost' i tekhnologiya / S. L. Bazhenov [i dr.]. — Dolgoprudnyi: Intellekt, 2010. — 352 s.
14.Polimernye kompozitsionnye materialy: struktura, svoistva, tekhnologiya / M. L. Kerber, V. M. Vinogradov, G. S. Golovkin [i dr.]; pod red. A. A. Berlina. — SPb.: Professiya, 2009. — 560 s.
15.Semchikov, Yu. D. Vysokomolekulyarnye soedineniya / Yu. D. Semchikov. — 3-e izd. — M: Akademiya, 2006. — 368 s.
16.Sopolimery na osnove kubovykh ostatkov rektifikatsii stirola — modifikatory drevesiny / S. S. Nikulin, I. A. Sakhokiya, A. I. Dmitrenkov [i dr.] // Izvestiya vuzov. Lesnoi zhurnal. — 2002. — № 2. — S. 78—86.
17.Tager, A. A. Fiziko-khimiya polimerov / A. A. Tager. — M.: Nauchnyi mir, 2007. — 576 s.
18.Tekhnologiya polimernykh materialov / A. F. Nikolaev, V. K. Kryzhanovskii, V. V. Burlov [i dr.]. — SPb.: Professiya, 2008. — 544 s.
19.Filimonova, O. N. Pererabotka i primenenie kubovykh ostatkov rektifikatsii stirola / O. N. Filimonova // Uspekhi sovremennogo estestvoznaniya. — 2010. — № 2. — S. 115—117.
20.Bayramoglu G. Synthesis and characterization of UV-curable dual hybrid oligomers based on epoxy acrylate containing pendant alkoxysilane groups / G. Bayramoglu, M. Vezir K. Nilhan, K. Apohan, A. Güngör // Progress in Organic Coatings. — 2006. — Vol. 57, № 1. — P. 50—55.
21.Mathew, A. M. Styrene butadiene co-polymer based conducting polymer composite as an effective corro-
sion protective coating / A. M. Mathew, P. Predeep // Progress in Organic Coatings. — 2012. — Vol. 1, № 7. — P. 174—181.
71
Научный журнал строительства и архитектуры
22. Ozyilmaz, A. T. Polyaniline, poly (N-methylaniline) and poly (aniline-co-N-methylaniline) coatings on stainless steel / A. T. Ozyilmaz, A. Akdag // Transactions of the Institute of Metal Finishing. — 2011. — Vol. 4,
№89. — P. 203—215.
23.Shi, H. Hydrophobic Waterborne Epoxy Coating Modified by Low Concentrations of Fluorinated Reactive Modifier / H. Shi, W. Liu, M. Yang, Zh. Wang // Macromolecular Research. — 2019. — Vol. 4, № 27. — P. 145—157.
24.Xie, Y. A novel approach to fabricate polyacrylate modified graphene oxide for improving the corrosion resistance of epoxy coatings. (February 2020) /Y. Xie, Ch. Liu, W. Liu, M. Yang // Colloids and Surfaces a Physicochemical and Engineering Aspects. — DOI: 10.1016/j.colsurfa.2020.124627.
25.Xu, Y. Corrosion and fouling behaviors of phosphatized Q235 carbon steel coated with fluorinated polysiloxane coating / Y. Xu, M. Li, M. Liu // Progress in Organic Coatings. — 2016. — Vol. 57, № 34. — P. 177—188.
ACRYLIC OLIGOMER BASED ON BUTADIENE DIMER
FOR ANTI-CORROSION SURFACING
D. S. Glazkov 1, V. A. Kozlov 2
Voronezh State Technical University 1, 2
Russia, Voronezh
1Student of the Faculty of Civil Engineering, e-mail: glazckov.mitia@yandex.ru
2D. Sc. in Physics and Mathematics, Prof., Head of the Dept. of Structural Mechanics, e-mail: vakozlov61@yandex.ru
Statement of the problem. The objective of the work was to assess the effectiveness of the modifying effect of the 4-vinylcyclohexene co-oligomer with methyl methacrylate (OBMMA-50) on the properties of an anticorrosion coating based on KORS copolymer obtained using styrene rectification residues to increase the technological and operational physical and mechanical characteristics of the initial coating.
Results. The functional, structural and conformational features of the initial copolymer and oligomeric modifier are established, which ensure their compatibility in the formation of an anti-corrosion surfacing. The optimal prescription composition and effective range of the acrylic oligomer content were revealed, where there is an increase in technological and physico-mechanical parameters of the initial anticorrosion surfacing from 15 to 100 %.
Conclusions. The features in the structure and composition of the starting polymer and acrylic modifier are shown that provide a significant increase in the physical and mechanical parameters of the coating containing the optimal concentration of acrylic oligomer in its composition.
Keywords: distillation residues of styrene rectification, butadiene dimer, acrylic co-oligomer, anticorrosive composite material.
ФОНД «СКОЛКОВО»ОБЪЯВЛЯЕТ ОТКРЫТЫМ ПРИЕМ ЗАЯВОК
НА УЧАСТИЕ В КОНКУРСНОМ ОТБОРЕ ПИЛОТНЫХ ПРОЕКТОВ
АПРОБАЦИИ ТЕХНОЛОГИЙ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
ВПРИОРИТЕТНЫХ ОТРАСЛЯХ С 1СЕНТЯБРЯ 2021ГОДА
Врамках федерального проекта «Искусственный интеллект» фондом «Сколково» осу-
ществляется поддержка пилотных проектов апробации технологий искусственного интеллекта в приоритетных отраслях.
Форма поддержки — предоставление грантов определенным по итогам конкурсного отбора российским организациям, осуществляющим в качестве заказчиков пилотное внедрение российского программного обеспечения, платформенных решений, сервисов или программно-аппаратных комплексов, созданных на основе технологий искусственного интеллекта, в целях преобразования технологических или бизнес-процессов в своей деятельности или деятельности своих аффилированных лиц.
По вопросам участия в конкурсном отборе обращаться по адресу электронной почты dtech@sk.ru или на контактный номер +7(495)956-00-33, доб. 3311.
72

Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
ТЕХНОЛОГИЯ И ОРГАНИЗАЦИЯ СТРОИТЕЛЬСТВА
УДК 69.002.5
DOI 10.36622/VSTU.2021.63.3.007
ВЫЧИСЛЕНИЕ ОБЪЕМА РАБОТ НА ТИПОВОЙ ТЕХНОЛОГИЧЕСКОЙ СТОЯНКЕ ЭКСКАВАТОРА
ДЛЯ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ МОДЕЛИ
В. Н. Кабанов 1
Национальный исследовательский Московский государственный строительный университет 1 Россия, г. Москва
1 Д-р экон. наук, проф. кафедры технологии и организации строительного производства, e-mail: kabanovvn@yandex.ru
Постановка задачи. Построение информационных моделей строительных процессов невозможно без точного вычисления объема работ, выполняемого на типовой технологической стоянке (захватке). Цель работы состоит в разработке системы автоматизации вычислительных процедур, применяемых при определении объема земляных работ на типовой технологической стоянке экскаватора, которая используется в 4D- и 5D-BIM-моделях.
Результаты. Получены аналитические уравнения для вычисления объема земляных работ на одной технологической стоянке экскаватора с учетом технических характеристик землеройных машин, а также условий производства работ (категорий грунта повеличине угла внутреннего трения).
Выводы. Аналитические зависимости объема работ на одной типовой технологической стоянке экскаватора от технических характеристик и условий производства работ (категорий грунта) могут применяться для формирования процедур автоматического вычисления объема работ, продолжительности и стоимости устройства котлованов. Величина объема работ на одной технологической захватке может применяться для формирования, оценки и выбора траектории движения экскаватора при устройстве котлована.
Ключевые слова: информационная модель, автоматизация, автоматическое вычисление объема работ, земляные работы, технологическая стоянка экскаватора.
Введение. В процессе построения информационных моделей строительных процессов решаются частные задачи по описанию технологических процессов производства строитель- но-монтажных работ. Целевой функцией цифрового описания технологий строительного производства является движение полной автоматизации и роботизации. Следует заметить, что на траектории движения к этой цели появляется целый ряд задач, которые требуют уточнения решений, большинство из которых предложены в прошлом веке. Например, для математического описания движения экскаватора при разработке грунта в котловане недостаточно информации, приведенной в «Технологических схемах применения новых средств механизации земляных работ» (М.: ЦНИИОМТП Госстроя СССР, 1982 г.).
Производство земляных работ традиционно относят к высокомеханизированным технологиям, для которых переход к полной роботизации производственных процессов наиболее короткий по сравнению с другими видами строительно-монтажных работ. С середины прошлого века в строительстве широко применяются различные экскаваторы, которые пред-
© Кабанов В. Н., 2021
73

Научный журнал строительства и архитектуры
ставляют собой классические манипуляторы. Казалось, что технология механизированной разработки грунта изучена полностью. Однако переход к цифровым технологиям, а также моделированию процессов копания заставляют исследователей вновь обращаться к решениям, которые получены предшествующими поколениями инженеров-исследователей.
В периодической научной литературе весьма детально рассмотрены методы моделирования процессов копания [2, 8, 17, 18, 21, 22, 25], движение рабочего органа экскаватора
[1, 5, 13, 15, 23], удаленного управления землеройной машиной [3, 4, 6, 10—12, 14, 16, 24],
а также моделирования поведения машиниста [7, 19]. Это важные проблемы, которые находят практическое применение в машиностроении. Вопросы организации работы экскаватора на строительной площадке практически остаются за пределами научного интереса исследователей.
Цель настоящей работы состоит в построении информационной модели, описывающей объем земляных работ, который может выполнить экскаватор с одной типовой технологической стоянки. Для достижения цели решены следующие научные задачи:
минимизировано количество показателей, которые описывают физико-механические характеристики грунта и применяются для построения информационной модели;
разработана расчетная схема для вычисления объема работ с учетом физикомеханических свойств грунта, с геометрическими размерами, установленными для проектов
в3D-BIM-модели;
получено аналитическое выражение для вычисления геометрических характеристик и объема работ на одной типовой технологической стоянке экскаватора.
При выборе методов исследования автор исходил из того, что задача распознания образов применительно к поверхности земли в целом решена, следовательно, появляется возможность для использования простого математического аппарата, не требующего специальной математической подготовки. На этом основании в работе применялись методы аналитической геометрии, а также приближенных вычислений объемов тел вращения. Полученные аналитические выражения представляют собой информационную модель объема работ для каждой типовой технологической стоянки экскаватора, которая учитывает в качестве производных физико-механических характеристик грунта естественный угол откоса и расстояние от нижней кромки котлована до ближайшей опоры землеройной машины.
1. Информационные модели для описания производства земляных работ. В на-
стоящей работе не рассматриваются достижения в области электроники, которая применяется для распознания образов и преобразования сигналов компьютерных программ в движения рабочих органов. Основной акцент сделан на технологических операциях, которые выполняются экскаватором при производстве земляных работ, необходимых для сооружения котлована при строительстве гражданских зданий. С этой точки зрения материалы опубликованных исследований целесообразно разделить на 2 большие части: первая часть посвящена автоматизации отдельных процессов, а вторая — созданию роботизированного комплекса «беспилотный экскаватор». Важно отметить, что обе части тесно связаны. Невозможно разработать беспилотный экскаватор без цифрового описания отдельных технологических операций.
При разработке программного обеспечения для функционирования беспилотного экскаватора в качестве исходной информации служит 3D-модель объекта строительства и внешнего окружения рабочей зоны [11]. Кроме этого, решается задача информационного описания взаимодействия экскаватора и автосамосвала [10]. Выбор наиболее эффективного комплекта землеройной машины (экскаватора) и автосамосвалов может выполняться автоматически при помощи соответствующей информационной модели [9].
Информационное описание технологических процессов, которые выполняются экскаватором при разработке грунта, можно условно разделить на три группы. К первой группе
74
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
относятся работы, которые моделируют движение рабочих органов экскаватора по аналогии с действиями машиниста (человека). Ко второй группе следует отнести построение математических моделей движения рабочего органа экскаватора. К третьей — описание траектории наполнения ковша экскаватора. Наконец, к четвертой относится моделирование каждой технологической стоянки экскаватора при выполнении земляных работ по устройству котлована.
При построении моделей, которые аналогичны действию машиниста экскаватора, к числу основных направлений следует относить:
способ моделирования виртуального оператора [7];
сравнение результатов, которые получены при помощи технологии виртуальной реальности, с показателями работы человека [19];
разработку виртуального прототипа экскаватора [3, 6];
Для моделирования движения «руки» экскаватора применяется:
информация, полученная от датчиков слежения, размещенных на рабочем органе экскаватора [5];
дополнение информации, которая получена от датчиков, за счет данныхGPS [4, 24];
моделирование траектории движения рабочего органа [1], в том числе при помощи методов нечеткой логики [23];
построение модели движения рабочего органа [2], включая совместное движение с поворотной платформой экскаватора [13];
К числу наиболее сложных задач моделирования работы экскаватора относится математическое описание процесса наполнения ковша. Полезно остановиться на предлагаемых методах исследованиях и математическом аппарате:
метод конечных элементов при оценке усилий резания грунта в зависимости от его физико-механических свойств [17, 21];
методология теории нечеткой логики и нечетких множеств при построении уравнения множественной корреляции, описывающего процесс копания [22];
построение нелинейной непараметрической статистической модели по результатам экспериментальных данных [18];
применение уравнений Ньютона-Эйлера для построения выпуклого многогранника для моделирования процесса набора грунта ковшом экскаватора [25];
Проектирование технологической стоянки экскаватора предполагает определение таких геометрических размеров, которые обеспечивают наиболее полное использование технических характеристик землеройной машины, а также условия безопасного производства земляных работ. В этом направлении исследователи предлагают:
имитацию выемки с визуализацией в среде 3D-BIM-модели [8];
интеграцию 3D-BIM-модели с веб-информационной системой получения фактического изображения [10], в том числе для линейных объектов строительства [12];
совместное использование аппаратных и программных технологий [15]
построение информационной модели на основе географической информации, конфигурации и положения основных строительных машин [14];
применение когнитивных технологий и их описание в 3D-BIM-моделях [20];
создание 4D-точечной карты через твердотельный 2D-профилометр [16]. Приведенные выше аргументы дают основания утверждать, что изучение технологи-
ческих процессов производства земляных работ следует относить к актуальным направлениям научных исследований. Необходимо обратить внимание на важность принятия обоснованных и эффективных решений на стадии разработки проекта строительства в части выбора методов производства работ, а также ведущих строительных машин. Применитель-
75

Научный журнал строительства и архитектуры
но к производству земляных работ при помощи экскаватора задача моделирования технологического процесса не относится к сложной. Достаточно логичные и простые в описании геометрические фигуры могут применяться для построения информационных моделей. Следует обратить внимание, что при моделировании технологии разработки грунта экскаватором существует целый ряд частных задач, которые требуют значительных затрат труда и высокого уровня квалификации. К числу таких задач относится модель наполнения ковша экскаватора.
2. Общие требования к информационной модели типовой технологической стоян-
ки экскаватора. Применение информационных технологий в процессе проектирования ор- ганизационно-технологических решений строительства обеспечивает получение информации для любого момента времени. Требования к построению информационных моделей в строительстве установлены в СП 333.1325800.2017. Необходимо подчеркнуть, что описание рабочего цикла экскаватора не относится к сколько-нибудь сложной задаче. Методы управления землеройными машинами детально описаны в ИСО 6165-2010. Earth-moving machinery. Classification. Terms and definitions. Однако нормативные документы не устанав-
ливают порядок вычисления объема работ, который выполняется экскаватором на одной технологической захватке.
Опыт разработки рабочей организационно-технологической документации на разработку грунта при устройстве котлованов позволяет сделать вывод о том, что объем работ на одной технологической стоянке (захватке) является расчетной величиной, которая может существенно влиять на значение продолжительности и стоимости выполнения работ. В настоящей работе не приводится порядок определения количества технологических захваток для экскаватора, поскольку решение этой задачи требует отдельного рассмотрения.
При вычислении объема работ на одной технологической стоянке экскаватора необходимо учитывать следующие особенности устройства котлованов при строительстве зданий и сооружений:
минимальный размер стороны котлована превышает максимальную ширину копания экскаватора (в большинстве случаев удвоенный максимальный радиус копания);
глубина копания, как правило, превышает половину максимальной глубины копания экскаватора;
физико-механические характеристики грунта известны и приведены в официальном отчете о выполнении инженерно-геологических испытаний на участке, отведенном под строительство.
Для выполнения вычислений необходимо получить информацию о технических характеристиках экскаватора, а также из отчета об инженерно-геологических исследованиях установить угол естественного откоса и геометрические размеры призмы обрушения грунта. Таким образом, исходные данные, которые необходимы для информационного моделирования типовой технологической стоянки экскаватора, представляют собой 2 части.
Первая часть описывает технические характеристики экскаватора и состоит из следующих количественных показателей:
максимального радиуса копания;
размеров ходовой части транспортной платформы экскаватора с привязкой оси вращения поворотной платформы.
Вторая часть представляет собой результаты инженерно-геологических изысканий, которые необходимы для вычисления следующих характеристик грунта:
естественного угла откоса грунта;
расстояния от нижней кромки дна котлована до ближайшей опоры экскаватора (результат расчета геометрических размеров призмы обрушения).
Наконец, проектом предусматривается отметка дна котлована или заданная глубина копания. Глубина копания в зависимости от физико-механических грунта задает геометриче-
76

Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
ские размеры грунта, который может быть выкопан с одной технологической стоянки. Здесь под типовой технологической стоянкой экскаватора понимается наиболее часто повторяющаяся геометрия выкапываемого грунта.
Не вызывает трудностей вычисление максимального радиуса копания на глубине, установленной проектом:
RZ max Rmax2 |
Z P2 , |
(1) |
где RZmax — максимальный радиус копания на глубине, которая установлена проектом (ZP); Rmax — максимальный радиус копания на поверхности земли, который установлен техническими характеристиками экскаватора; ZP — глубина копания, которая установлена проектом.
Для определения минимального радиуса копания, который определяется с целью обеспечения безопасных условий производства земляных работ, используют формулу:
RZmin lZ b, |
(2) |
где RZmin — минимальный радиус копания на глубине, которая установлена проектом (ZP); lZ — расстояние от нижней кромки дна котлована до ближайшей опоры экскаватора, которая определяется при расчете геометрических размеров призмы обрушения; b — расстояние от оси вращения экскаватора до опоры, которая расположена на ближайшем расстоянии от верхней кромки откоса котлована (вычисляется по техническим характеристикам ходовой платформы экскаватора).
3. Модель для вычисления объема на типовой технологической стоянке экска-
ватора. В настоящей работе нет необходимости останавливаться на вычислении геометрических размеров призмы обрушения в зависимости от физико-механических свойств грунта. Эта задача достаточно подробно решена и приводится в национальных стандартах (прил. В СП 45.13330.2017), в том числе в виде готовых значений для связанных, несвязанных, скальных и других видов грунтов. В приведенном документе не сложно найти готовое значение естественного откоса грунта, которое вычисляют в зависимости от угла внутреннего трения. На этом основании можно считать, что расстояние от нижней кромки дна котлована lZ и угол естественного откоса грунта tga получают на основании значений, приведенных в национальных стандартах в зависимости от физико-механических характеристик грунтов, которые установлены в результате выполненных инженерногеологических исследований.
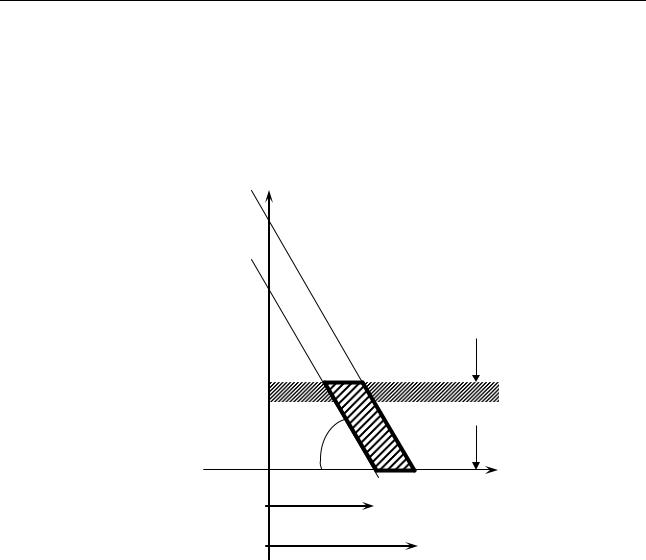
Для вычисления объема работ на одной технологической стоянке экскаватора приводится расчетная схема (рис.). Не требует доказательств, что максимальный объем представляет собой величину объема фигуры, полученной в результате вращения параллелограмма (заштрихованная фигура на рис.). Для вычисления объема можно пользоваться достаточно разнообразными методами. В настоящей работе приводится наиболее общий, с точки зрения автора, подход к определению объемов тел, полученных в результате вращения.
В общем виде математическое выражение для вычисления объема имеет вид:
|
Z |
|
|
|
Z |
2 |
Z |
|
|
|
2 |
|
|
||
V |
|
R |
tga |
|
|
R |
tga |
Z |
, |
(3) |
|||||
|
|
|
|
||||||||||||
R |
|
|
Z max |
|
|
|
|
Z min |
|
|
|
|
|||
|
ZP |
|
|
|
tga |
|
ZP |
|
|
|
tga |
|
|
||
где VR — объем тела, полученного в результате вращения параллелограмма (заштрихованная фигура на рис.) относительно оси Z; RZmax и RZmin — соответственно максимальный (вычисляется по формуле (1)) и минимальный (вычисляется по формуле (2)) радиусы копания на глубине, которая установлена проектом (ZP); tga — угол естественного откоса грунта, который находится по данным, приведенным в национальных стандартах для грунтов с различ-
77
Научный журнал строительства и архитектуры
ными физико-механическими свойствами, или вычисляется по известным методикам в зависимости от установленного угла внутреннего трения.
Важно обратить внимание, что в реальных производственных условиях экскаватор не выкапывает грунт вокруг технологической стоянки на 360°. Следовательно, для получения фактического значения объема земляных работ, которые выполняются с одной стоянки, необходимо и достаточно ввести коэффициент, учитывающий величину сектора, на котором запроектировано выполнение работ. Величина такого коэффициента легко может быть вычислена при известном значении ширины копания (ширины забоя экскаватора B).
Z
RZmaxtga
RZmintga |
|
X RZ maxtga |
Z |
|
|
||||||
|
tga |
|
|||||||||
|
|
|
|
|
|
|
|||||
X RZ mintga |
Z |
|
|
|
|
|
Z = 0 |
|
|||
|
|
|
|
|
|
|
|||||
tga |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z = ZP |
|
||
|
|
|
|
tga |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
RZmin |
|
|
|
|
X |
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RZmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Расчетная схема технологической стоянки экскаватора
Ширина копания вычисляется в зависимости от технических характеристик экскаватора Rmax и свойств грунта tga:
(Rmax Z |
0 RX RZ max ZPtga B 2RX |
, |
|
P tga) RZ max |
0 RX Rmax B 2RX , |
(4) |
|
|
|
|
|
где B — ширина технологической стоянки (забоя) экскаватора на поверхности земли; ZP — глубина котлована, которая установлена проектом; tga — естественный угол откоса грунта, который установлен по результатам выполненных инженерных изысканий; RX — расчетное значение предельного радиуса копания на поверхности земли; Rmax — максимальный радиус копания на поверхности земли, который установлен по техническим характеристикам экскаватора; RZmax — расчетная величина, вычисленная по формуле (1).
Применяя правила элементарной математики, не сложно записать уравнение для вычисления коэффициента, который показывает, какая доля фигуры вращения (см. рис.) находится в рабочей зоне экскаватора на технологической стоянке:
|
|
B |
|
|
|
|
arcsin |
|
|
||
|
|
|
|||
k |
|
2RX |
. |
(5) |
|
|
|
||||
V |
180 |
|
|
|
|
|
|
|
|
||
78
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
Таким образом, при помощи информационной модели, которая описывает работу экс- |
|
каватора на одной технологической стоянке, можно вычислить объем работ: |
|
VF kVVR, |
(6) |
где VF — объем земляных работ, выполняемых экскаватором с одной типовой технологической стоянки.
Выводы. Результаты практической эксплуатации описанной информационной модели позволяют сделать следующие выводы:
1.Предложенная расчетная схема позволяет формировать исходные данные, которые необходимы для описания траектории движения ковша экскаватора для каждого рабочего цикла;
2.Определение максимального размера ширины типовой технологической стоянки экскаватора (формула (4)) позволяет автоматизировать процесс вычисления координат X и Y, которые описывают положение каждой типовой технологической стоянки в пространстве;
3.Привязка технологического процесса разработки грунта экскаватором при устройстве котлована ко времени выполняется по результатам вычисления объема работ (формулы (3), (5), (6)) на одной технологической стоянке. Продолжительность выполнения работ определяется путем вычисления количества рабочих циклов, необходимых для разработки грунта
вобъеме VF;
4.Предлагаемый подход впервые систематизирует накопленный практический опыт и
знания о механизированной разработке грунта в целях построения цифровой модели технологического процесса производства земляных работ при устройстве котлована;
5. Предлагаемая система автоматизированного вычисления объема работ на типовой технологической стоянке экскаватора является необходимым и достаточным условием для формирования модели движения землеройной машины при выполнении работ по устройству котлована. Известная величина объема (в том числе и площадь) служат ключевым элементом при научном обосновании траектории движения экскаватора, например, с минимальной суммой последовательных перемещений от одной стоянки к другой.
Библиографический список
1.Бурый, Г. Г. Математическое моделирование процесса копания грунта сферическим ковшом / Г. Г. Бурый, И. К. Потеряев, С. Б. Скобелев, В. Ф. Ковалевский // Горное оборудование и электромеханика. — 2020. — № 4. — С. 53—58. — DOI: 10.26730/1816-4528-2020-4-53-58.
2.Савинкин, В. В. Обоснование оптимальных углов позиционирования рабочего органа оборудования экскаватора при эффективном копании грунта / В. В. Савинкин, В. Н. Кузнецова // Вестник машиностроения. — 2019. — № 1. — С. 23—28.
3.Сафронов, В. Н. Расчетная модель и программа расчета механической системы исполнительного органа гидравлического экскаватора / В. Н. Сафронов, Ю. В. Зайцев // Горное оборудование м электромеханика. — 2019. — 3 (143). — С. 33—38. — DOI: 10.26730/1816-4528-2019-3-33-38.
4.Сахапов, Р. Л. Спутниковые навигационные системы управления учебными динамическими моделями / Р. Л. Сахапов // Инновации в сельском хозяйстве. — 2019. — № 1. — С. 222—230.
5.Azar, E. R. Feasibility of in-plane articulation monitoring of excavator arm using planar marker tracking /
E. R. Azar, C. Feng, V. R. Kamat // Journal of Information Technology in Construction. — 2015. — Vol. 20. — Р. 213—229.
6.Bender, F. A. Predictive operator modeling for virtual prototyping of hydraulic excavators / F. A. Bender, M. Mitschke, T. Bräunl, O. Sawodny // Automation in Construction. — 2017. — Vol. 84. — Р. 133—145. — DOI: https://doi.org/10.1016/j.autcon.2017.08.008.
7.Du, Yu. Virtual operator modeling method for excavator trenching / Yu. Du, M. Dorneich, B. L. Steward // Automation in Construction. — 2016. — Vol. 70. — Р. 14—25. — DOI: 10.1016/j.autcon.2016.06.013.
8.Guevremont, M. 4D Simulation of Rock Excavation Projects. / M. Guevremont, A. Hammad // Canadian Society of Civil Engineering Conference (CSCE) & ASCE Construction Research Conference (CRC) At. — 2019. — https://www.researchgate.net/publication/334248203_4D_Simulation_of_Rock_Excavation_Projects.
79