

3889
.pdfНаучный журнал строительства и архитектуры
Выводы:
1. Согласно полученному риску, 28 автомобилей из 10 000 (или 3 автомобиля из 1 000) на шестиполосной автомобильной дороге в одном направлении движения будут участниками столкновения по причине недостаточной ширины покрытия и низкого качества ее строительства;
2.Допустимый риск на существующих дорогах, построенных до применения Федерального закона № 184-ФЗ «О техническом регулировании», составляет 1×10 -3;
3.Рассмотрим увеличение ширины покрытия в одном направлении движения до 12,81 м и снижение среднеквадратического отклонения данной ширины до значения 0,20 м.
При таком решении по формуле (1) получаем, что риск возникновения ДТП для описанного выше состава движения принял допустимое значение на существующих дорогах 1×103:
|
|
12,81 10,28 |
|
||||
r |
0,5 Ф |
|
|
|
|
|
0,00102. |
|
|
|
|
|
|||
Д.У. |
|
0,20 |
2 |
0,79 |
2 |
|
|
|
|
|
|
|
|||
Следовательно, при совершенствовании поперечного профиля существующей многополосной дороги средняя ширина покрытия должна быть не менее 12,81 м, а среднеквадратическое отклонение ширины покрытия не должно превышать 0,20 м.
Выводы
1.Показана методика нормирования ширины покрытия многополосной дороги (для разработки ГОСТ и СП или для проверки соответствия нормированных параметров требуемым параметрам) на основе расчета и уменьшения риска столкновения транспортных средств на шестиполосной дороге до допустимого риска.
2.Разработаны математические модели и методы проектирования ширины покрытия на основе соблюдения приемлемого или допустимого риска столкновения транспортных средств при опережении со сменой полос движения (при любых параметрах транспортных средств на многополосной проезжей части).
3.Представлен алгоритм совершенствования параметров поперечных профилей существующих многополосных дорог на основе оценки и снижения риска возникновения ДТП до допустимого значения в процессе маневрирования с опережением быстроходными автомобилями тихоходных транспортных средств на многополосной проезжей части.
Библиографический список
1.Ветрогон, А. А. Транспортное моделирование как инструмент для эффективного решения задач в области управления транспортными потоками / А. А. Ветрогон, М. Н. Крипак // Современные технологии. Системный анализ. Моделирование. — 2018. — № 3 (59). — С. 82—91.
2.Грановский, В. А. Методы сбора и обработки информации транспортных потоков / В. А. Грановский, А. Е. Одинцов // Автомобильная промышленность. — 2015. — № 2. — С. 25—26.
3.Данилкин, В. А. Построение модели перестроения транспортным средств в транспортных потоках / В. А. Данилкин, А. А. Трухачев, А. Г. Бельтов // Программная инженерия. — 2012. — № 6. — С. 30—34.
4.Старожилец, В. М. Об идентификации статистической модели транспортных потоков с использованием групп автомобильно-транспортных средств / В. М. Старожилец, Ю. В. Чехович // Машинное обучение и анализ данных. — 2017. — Т. 3. — С. 193—202.
5.Столяров, В. В. Определение допустимых среднеквадратических отклонений геометрических параметров автомобильных дорог / В. В. Столяров, Н. В. Щеголева // Дороги и мосты. — 2018. — Т. 38. — С. 5.
6.Столяров, В. В. Проектирование автомобильных дорог по условию обеспечения безопасности движения с использованием теории риска: дис. … д-ра техн. наук: 05.23.11 / Виктор Васильевич Столяров. — Са- ратов-Москва, 1995. — 337 с.
7. |
Столяров, |
В. В. Проектирование автомобильных дорог с учетом теории риска: в 2 ч. Ч. 1 / |
В. В. Столяров. — Саратов: Сарат. гос. техн. ун-т, 1994. — 184 с. |
||
8. |
Столяров, |
В. В. Дорожные условия и организация движения с использованием теории риска / |
В. В. Столяров. — Саратов: СГТУ, 1999. — 168 с.
110
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
9.Столяров, В. В. Ограничение скорости по допустимому риску для обеспечения безопасности движения на сложных участках автомобильных дорог / В. В. Столяров, В. А. Гусев, Н. В. Щеголева // Организация
ибезопасность дорожного движения в крупных городах: сб. тр. участников 11-й междунар. науч.-практ. конф., г. Санкт-Петербург, 18—20 сент. 2014 г. — СПб: СПбГАСУ, 2014. — С. 369—379.
10.Столяров, В. В. Примеры расчета геометрических, транспортно-эксплуатационных и прочностных
параметров автомобильных дорог на основе теории риска: в 2 ч. Ч. I. Проектирование / В. В. Столяров, Н. В. Щеголева, Н. Е. Кокодеева, А. В. Кочетков; под общ. ред. В. В. Столярова. — Саратов: Саратов. гос. техн. ун-т, 2017. — 272 с.
11.Тебеньков, С. Е. Результаты оценки распределения транспортных потоков в транспортных коридорах / С. Е. Тебеньков, А. Г. Левашев // Вестник Иркутского государственного технического университета. — 2011. — № 10 (57). — С. 120—127.
12.Торобеков, Б. Т. Развитие транспортной логистической системы путем мониторинга транспортного потока / Б. Т. Торобеков, В. И. Охотников // Известия Кыргызского государственного технического университета им. И. Раззакова. — 2017. — № 4 (44). — С. 428—433.
13.Технические характеристики автомобилей // Автомаркет.Ру. — http://avtomarket.ru/catalog.
14.Ishihara, Y. Analysis of Traffic Congestion Reducer Agents on Multi-Lane Highway / Y. Ishihara, T. Sugawara // Proceedings — 2019 2nd International Conference on Intelligent Autonomous Systems, ICoIAS—2019. — 2019 — P. 135—141.
15. |
Jiao, X. Real-time lane detection and tracking for autonomous vehicle applications / X. Jiao, D. Yang, |
K. Jiang, |
T. Wen, R. Yan // Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile |
Engineering. — 2019. — № 233 (9). — P. 2301—2311.
16.Mandžuka, S. Lecture Notes in Networks and Systems / S. Mandžuka // Intelligent Mobility. — 2020 — P. 367—376.
17. Mestri, R. A. Identification and Removal of Accident-Prone Locations Using Spatial Data Mining /
R.R. Rathod, R. D. Garg // Lecture Notes in Civil Engineering. — 2020. — P. 383—394.
18.Shin, H. — S. Behavior Monitoring Using Learning Techniques and Regular-Expressions-Based Pattern Matching / H. — S. Shin, D. Turchi, S. He, A. Tsourdos // IEEE Transactions on Intelligent Transportation Systems. — 2019. — № 20 (4). — P. 1289—1302.
19. Song, D. Multi-vehicle tracking with microscopic traffic flow model-based particle filtering / D. Song,
R.Tharmarasa, M. C. Florea, X. N. Fernando, T. Kirubarajan // Automatica. — 2019. — № 105. — P. 28—35.
20.Szczuraszek, T. Influence on the Type of Intersection on Road Traffic Safety in Poland / T. Szczuraszek, R. Klusek // IOP Conference Series: Materials Science and Engineering. — 2019. — № 471 (6). — P. 75—83.
References
1.Vetrogon, A. A. Transportnoe modelirovanie kak instrument dlya effektivnogo resheniya zadach v oblasti upravleniya transportnymi potokami / A. A. Vetrogon, M. N. Kripak // Sovremennye tekhnologii. Sistemnyi analiz. Modelirovanie. — 2018. — № 3 (59). — S. 82—91.
2.Granovskii, V. A. Metody sbora i obrabotki informatsii transportnykh potokov / V. A. Granovskii, A. E. Odintsov // Avtomobil'naya promyshlennost'. — 2015. — № 2. — S. 25—26.
3. Danilkin, V. A. Postroenie modeli perestroeniya transportnym sredstv v transportnykh potokakh /
V.A. Danilkin, A. A. Trukhachev, A. G. Bel'tov // Programmnaya inzheneriya. — 2012. — № 6. — S. 30—34.
4.Starozhilets, V. M. Ob identifikatsii statisticheskoi modeli transportnykh potokov s ispol'zovaniem grupp avtomobil'no-transportnykh sredstv / V. M. Starozhilets, Yu. V. Chekhovich // Mashinnoe obuchenie i analiz dannykh. — 2017. — T. 3. — S. 193—202.
5.Stolyarov, V. V. Opredelenie dopustimykh srednekvadraticheskikh otklonenii geometricheskikh parametrov avtomobil'nykh dorog / V. V. Stolyarov, N. V. Shchegoleva // Dorogi i mosty. — 2018. — T. 38. — S. 5.
6.Stolyarov, V. V. Proektirovanie avtomobil'nykh dorog po usloviyu obespecheniya bezopasnosti dvizheniya s ispol'zovaniem teorii riska: dis. … d-ra tekhn. nauk: 05.23.11 / Viktor Vasil'evich Stolyarov. — Saratov-Moskva, 1995. — 337 s.
7. Stolyarov, V. V. Proektirovanie avtomobil'nykh dorog s uchetom teorii riska: v 2 ch. Ch. 1 /
V.V. Stolyarov. — Saratov: Sarat. gos. tekhn. un-t, 1994. — 184 s.
8.Stolyarov, V. V. Dorozhnye usloviya i organizatsiya dvizheniya s ispol'zovaniem teorii riska /
V.V. Stolyarov. — Saratov: SGTU, 1999. — 168 s.
9.Stolyarov, V. V. Ogranichenie skorosti po dopustimomu risku dlya obespecheniya bezopasnosti dvizheniya na slozhnykh uchastkakh avtomobil'nykh dorog / V. V. Stolyarov, V. A. Gusev, N. V. Shchegoleva // Organizatsiya i bezopasnost' dorozhnogo dvizheniya v krupnykh gorodakh: sb. tr. uchastnikov 11-i mezhdunar. nauch.- prakt. konf., g. Sankt-Peterburg, 18—20 sent. 2014 g. — SPb: SPbGASU, 2014. — S. 369—379.
10.Stolyarov, V. V. Primery rascheta geometricheskikh, transportno-ekspluatatsionnykh i prochnostnykh parametrov avtomobil'nykh dorog na osnove teorii riska: v 2 ch. Ch. I. Proektirovanie / V. V. Stolyarov,
111
Научный журнал строительства и архитектуры
N. V. Shchegoleva, N. E. Kokodeeva, A. V. Kochetkov; pod obshch. red. V. V. Stolyarova. — Saratov: Saratov. gos. tekhn. un-t, 2017. — 272 s.
11.Teben'kov, S. E. Rezul'taty otsenki raspredeleniya transportnykh potokov v transportnykh koridorakh / S. E. Teben'kov, A. G. Levashev // Vestnik Irkutskogo gosudarstvennogo tekhnicheskogo universiteta. — 2011. — № 10 (57). — S. 120—127.
12.Torobekov, B. T. Razvitie transportnoi logisticheskoi sistemy putem monitoringa transportnogo potoka /
B. T. Torobekov, V. I. Okhotnikov // Izvestiya Kyrgyzskogo gosudarstvennogo tekhnicheskogo universiteta im.
I.Razzakova. — 2017. — № 4 (44). — S. 428—433.
13.Tekhnicheskie kharakteristiki avtomobilei // Avtomarket.Ru. — http://avtomarket.ru/catalog.
14.Ishihara, Y. Analysis of Traffic Congestion Reducer Agents on Multi-Lane Highway / Y. Ishihara, T. Sugawara // Proceedings — 2019 2nd International Conference on Intelligent Autonomous Systems, ICoIAS—2019. — 2019 — P. 135—141.
15. |
Jiao, X. Real-time lane detection and tracking for autonomous vehicle applications / X. Jiao, D. Yang, |
K. Jiang, |
T. Wen, R. Yan // Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile |
Engineering. — 2019. — № 233 (9). — P. 2301—2311.
16.Mandžuka, S. Lecture Notes in Networks and Systems / S. Mandžuka // Intelligent Mobility. — 2020 — P. 367—376.
17. Mestri, R. A. Identification and Removal of Accident-Prone Locations Using Spatial Data Mining /
R.R. Rathod, R. D. Garg // Lecture Notes in Civil Engineering. — 2020. — P. 383—394.
18.Shin, H. — S. Behavior Monitoring Using Learning Techniques and Regular-Expressions-Based Pattern Matching / H. — S. Shin, D. Turchi, S. He, A. Tsourdos // IEEE Transactions on Intelligent Transportation Systems. — 2019. — № 20 (4). — P. 1289—1302.
19. Song, D. Multi-vehicle tracking with microscopic traffic flow model-based particle filtering / D. Song,
R.Tharmarasa, M. C. Florea, X. N. Fernando, T. Kirubarajan // Automatica. — 2019. — № 105. — P. 28—35.
20.Szczuraszek, T. Influence on the Type of Intersection on Road Traffic Safety in Poland / T. Szczuraszek, R. Klusek // IOP Conference Series: Materials Science and Engineering. — 2019. — № 471 (6). — P. 75—83.
APPLICATION OF RISK ASSESSMENT
WHILE ASSIGNING THE SURFACE WIDTH OF MULTI-LANE ROADS
N. V. Shchegoleva 1, V. V. Stolyarov 2, A. V. Kochetkov 3
Saratov State Technical University named after Y. A. Gagarin 1, 2
Russia, Saratov
Perm National Research Polytechnic University 3
Russia, Perm
1PhD in Engineering, Assoc. Prof. of the Dept. of Transport Construction, tel.: +7-937-256-86-30, e-mail: Shegoleva123@mail.ru
2D. Sc. in Engineering, Prof. of the Dept. of Transport Construction, tel.: +7-917-217-75-10,
e-mail: stolyarov_v_v@mail.ru
3 D. Sc. in Engineering, Prof. of the Dept. of Cars and Technological Machines, tel.: +7-906-306-95-53, e-mail: soni.81@mail.ru
Statement of the problem. The problem of ensuring the safety of vehicles on a multi-lane roadway of the required width of coverage is considered on the basis of a risk-oriented approach, in accordance with the Federal law of the Russian Federation No. 184-FZ «on Technical Regulation».
Results. The authors presented the applicability of the algorithm to assess the risk of interaction of vehicles on six-lane highways for determining regulatory performance; the required values of surfacing thickness for the design have been identified; recommendations on the improvement of the transverse profile when major repairs and reconstruction have been provided.
Conclusions. It was found that in normative documents for designing six-lane roads, the design vehicle should provide the change of normalized coating thickness, increasing it to values where the risk of collision of vehicles does not exceed the permissible value.
Keywords: risk theory, technical regulation, six-lane highway, roadway width, permissible risk, provided speed, traffic safety.
112

Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
СТРОИТЕЛЬНАЯ МЕХАНИКА
УДК 624.072.336.2
DOI 10.36622/VSTU.2021.63.3.011
АНАЛИТИЧЕСКИЙ РАСЧЕТ ДЕФОРМАЦИЙ
ИКИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОЙ ФЕРМЫ
СПРОИЗВОЛЬНЫМ ЧИСЛОМ ПАНЕЛЕЙ*
М. Н. Кирсанов 1, О. В. Воробьев 2
Национальный исследовательский университет «МЭИ» 1, 2 Россия, г. Москва
1Д-р физ.-мат. наук, проф. кафедры робототехники, мехатроники, динамики и прочности машин,
тел.: (495)362-73-14, e-mail: c216@Ya.ru
2Аспирант кафедры робототехники, мехатроники, динамики и прочности машин, тел.: +7(916)709-06-61, e-mail: olvarg@mail.ru
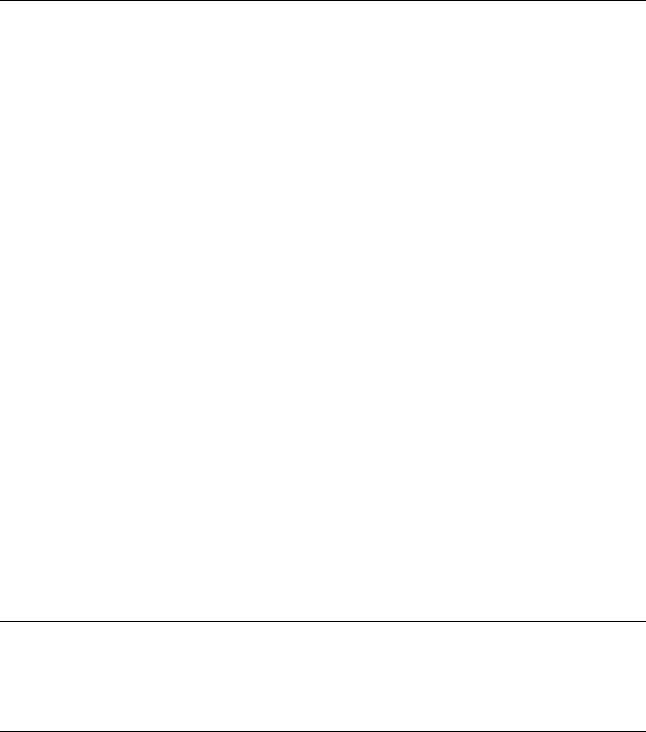
Постановка задачи. Разыскиваются аналитические зависимости прогиба и смещения опоры плоской фермы решетчатого вида от числа панелей. Ферма имеет сдвоенную решетку, прямолинейный нижний и приподнятый в средней части верхний пояс.
Результаты. Для двух видов нагружения по формуле Максвелла-Мора получены аналитические зависимости прогибов конструкции от нагрузки, размеров и числа панелей. Для обобщения серии частных решений с различным числом панелей ферм на произвольный случай использован метод индукции и аналитические возможности системы компьютерной математики Maple. Для некоторых решений получены асимптотические приближения. Показано распределение усилий в элементах фермы.
Выводы. Полученные формулы могут быть использованы в задачах оптимизации и как тестовые для оценки приближенных численных решений. Выявлены случаи геометрической изменяемости фермы при числе панелей, кратном трем. Приведен алгоритм выявления соответствующего распределения возможных скоростей шарниров.
Ключевые слова: плоская ферма, прогиб, смещение опоры, индукция, асимптотика, Maple, аналитическое решение, геометрическая изменяемость.
Введение. Одним из наиболее распространенных видов ферм являются фермы решетчатого типа. В работе предлагается схема такого типа и дается вывод достаточно общей формулы для зависимости ее прогиба, смещения подвижной опоры и первой частоты собственных колебаний от размеров фермы и числа панелей (рис. 1). Ферма относится к регулярным конструкциям [2, 4]. Для аналитического расчета напряженно-деформированного состояния таких конструкций с произвольным числом ячеек периодичности (панелей) применим индуктивный подход [1, 20]. Теоретические вопросы существования и анализа регулярных плоских и пространственных статически определимых ферм ранее поднимали
S. D. Guest, R. G. Hutchinson и N. A. Fleck [11—13].
© Кирсанов М. Н., Воробьев О. В., 2021
* Работа выполнена в рамках проекта «Динамика легких стержневых конструкций манипуляторов» при поддержке гранта НИУ «МЭИ» на реализацию программ научных исследований «Технологии индустрии 4.0 для промышленности и робототехника» 2020—2022 гг.
113
Научный журнал строительства и архитектуры
Рис. 1. Ферма при n = 5 под действием сосредоточенной нагрузки
Особенность предлагаемой схемы состоит в том, что из-за сложной решетки к ней неприменимы такие простые методы, как метод сечений (сечений Риттера здесь нет) и метод последовательного вырезания узлов, так как в ферме нет начального узла (шарнира), соединенного с двумя стержнями с неизвестными усилиями. Для расчета составляется и решается общая система уравнений равновесия всех узлов, в которую входят и реакции опор. Учитывая, что по условию поставленной задачи число панелей в конструкции произвольное, что приводит к составлению решения систем большого порядка и необходимости привлечения системы компьютерной математики. Если ограничиваться только определением усилий, то для этой цели подходит любая система (Maple, Mathematica, Maxima, Derive и др.). Однако для вывода общих формул методом индукции в системе должны быть предназначенные для этого операторы. Наиболее удобной оказалась система Maple [10], на языке которой имеется программа, ранее примененная для исследования прогиба плоских [7, 8, 14, 18, 19] и пространственных ферм [3, 16, 17]. Метод индукции совместно с операторами этой системы применялся и для расчета собственных частот плоских статически определимых ферм. Для аналитических расчетов стержневых систем, включая статически неопределимые, применяется также алгоритм Л. С. Рыбакова [5, 6].
1. Конструкция фермы и расчет усилий. Плоская ферма имеет 2n+2 панелей длиной a по нижнему поясу, высоту 3h/2 в средней части и h над опорами. Левая опора шарнирно подвижная, правая неподвижная. Всего в ферме ns =8n+14 стержней, включая три стержня, моделирующие опоры. Нижний прямолинейный пояс содержит 2n+3 шарнира, верхний — 4n+4. Ферма статически определима. Для определения усилий в стержнях воспользуемся программой на языке Maple [1], позволяющей найти усилия в стержнях в аналитической форме. Стержни и узлы нумеруются. Например, координаты шарниров нижнего пояса имеют вид (начало координат в шарнире подвижной опоры):
xi (i 1)a, yi 0, i 1,...,2n 3.
Координаты верхнего пояса:
x2n 4 0,x2n 5 a, x4n 6 x2n 2, x4n 7 x2n 3,
y2n 4 y2n 5 y4n 6 y4n 7 h,
xi 2n 5 (i 1/ 2)a, yi 2n 5 3h/ 2, i 1,...,2n.
Структура решетки задается упорядоченными списками, соответствующими стержням. Для элементов нижнего пояса имеем списки:
Vi [i,i 1], |
i 1,...,2n 1. |
Верхний пояс кодируется следующим образом:
Vi 2n 2 |
[i 2n 3,i 2n 4], |
i 1,...,2n 3. |
114
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
Аналогично в циклах длиной 2n+1 кодируются и стержни решетки.
Составляется система уравнений равновесия всех узлов в проекциях на оси координат
GS B . Для каждого узла в системе отводится по два уравнения в проекции соответственно на оси x и y. Элементами матрицы G системы являются направляющие косинусы усилий, вычисляемые по координатам узлов и в соответствии с данными списков Vi, i 1,...,ns .
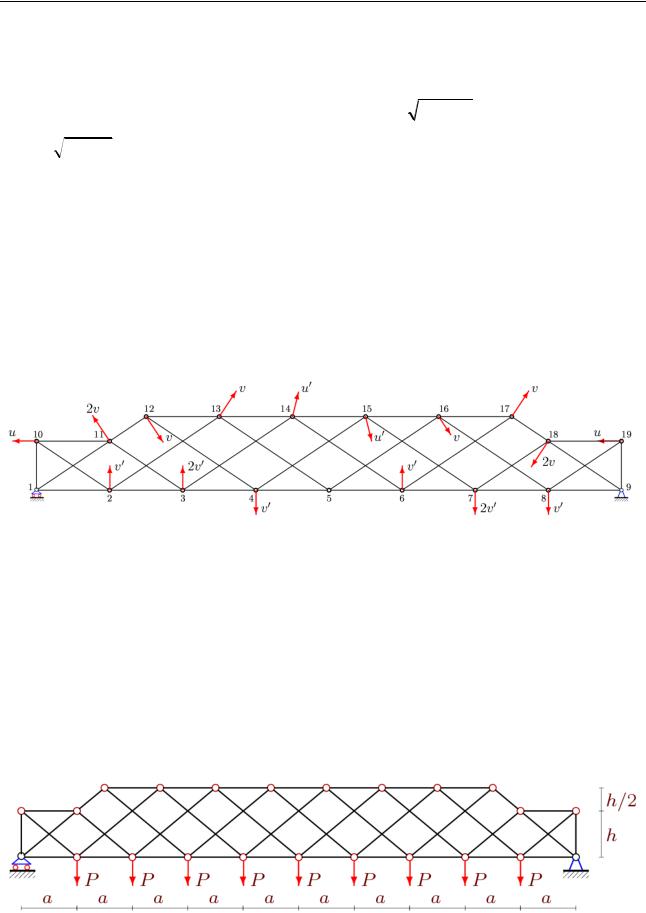
Правой частью системы является вектор нагрузок B . В четные элементы этого вектора помещаются вертикальные силы, в нечетные — горизонтальные. Для равномерного загружения узлов нижнего пояса (рис. 4) имеем:
B2i P, i 2,..,2n 2.
Остальные компоненты этого вектора равны нулю. Усилия находим из решения систе-
мы GS B . В системе Maple решение системы линейных уравнений, составленной в матричной форме, находится методом обратной матрицы. Обратная матрица в Maple находится просто. Соответствующий фрагмент программы имеет вид: G_1:=1/G: S:=G_1. B. Здесь S — вектор неизвестных усилий; B — вектор правых частей системы уравнений; G_1 — обратная матрица. Умножение матрицы на вектор на языке Maple обозначается точкой.
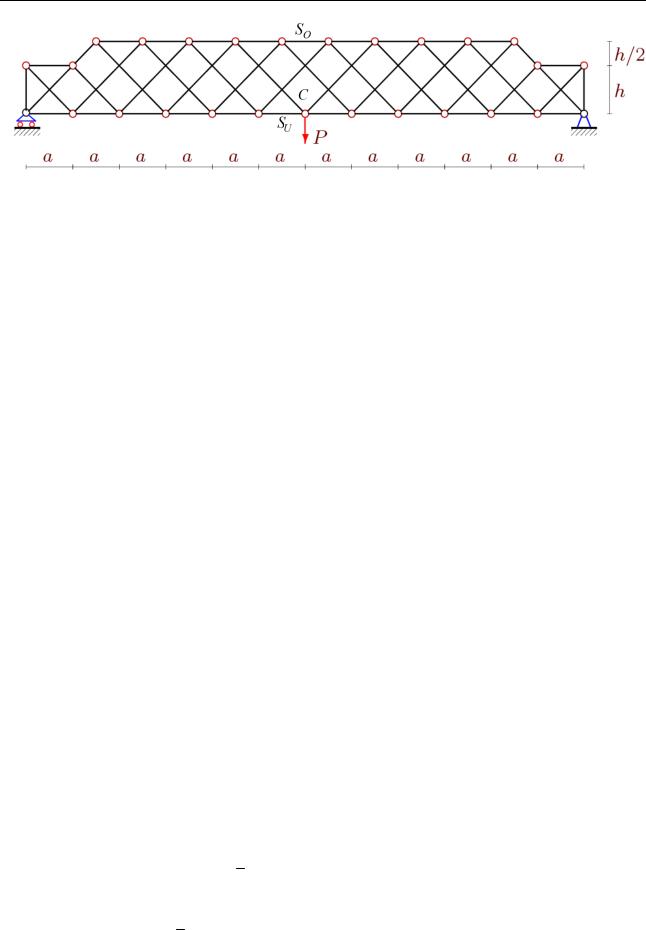
2. Случай геометрической изменяемости. Первые же расчеты фермы при разных n
показали, что определитель системы уравнений обращается в ноль, если число панелей кратно трем. Для подтверждения этого необходимо составить картину возможных скоростей узлов. Для этого удобно воспользоваться алгоритмом вычисления скорости среднего шарнира двузвенника по скоростям концов и координатам шарнира и концов стержней. Имеем двузвенник i, j, k (рис. 2). Компоненты vx,i , vy,i скорости шарнира i находятся из решения сис-
темы линейных уравнений:
vx, j vx,i (yj yi) ij,
vy, j vy,i (xj xi) ij,
vx,k vx,i (yk yi) ik ,
vy,k vy,i (xk xi) ik.
где ij , ik — угловые скорости звеньев.
Рис. 2. Двузвенник для определения виртуальных скоростей
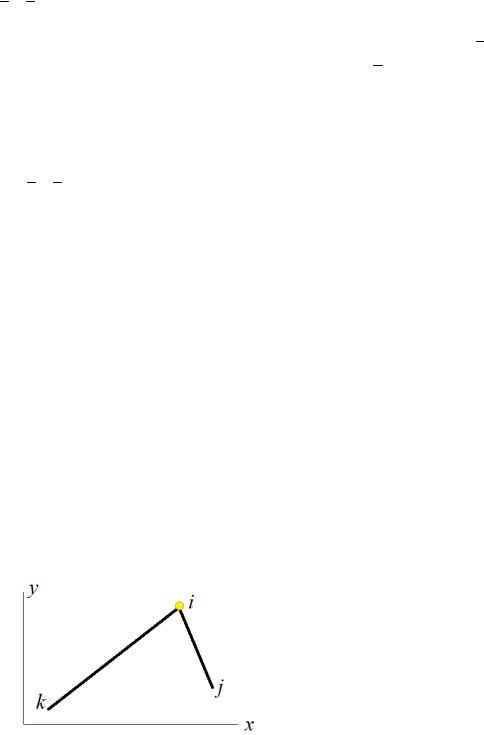
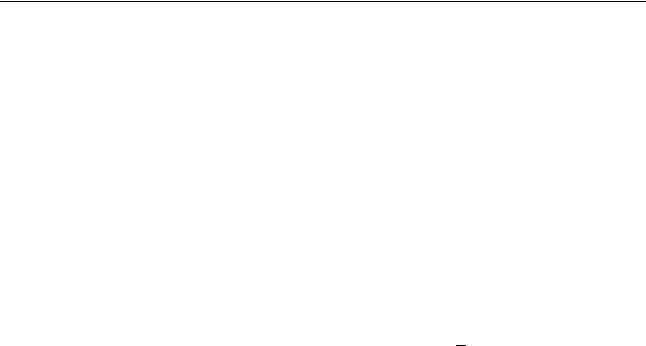
Схему вычислений удобно представить в виде графа {k, j} i, который означает, что скорость точки с номером i вычисляется по данным скоростей точек k и j. В рассмотренной ферме при n=3 (рис. 3) предположим, что скорость шарнира 5 равна нулю, и зададимся скоростями шарниров 16 и 13, величины которых обозначим v. Направлены эти векторы перпендикулярно стержням 5—16 и 5—13 соответственно. Далее последовательно строим графы {5,16} 8,
{9,8} 19, {9,19} 18, {8,18} 7, {16,18} 17 , {7,17} 6, {7,16} 15, {6,15} 14, {5,14} 13, {5,15} 4, {4,14} 3, {3,13} 2, {4,13} 12, {3,12} 11, {2,11} 10.
115
Научный журнал строительства и архитектуры
В результате получим
v2 v4 v6 v8 2va/ c, |
v3 v7 4va /c, |
|
|
||||||
v10 v19 u 2vh/ c, v11 v18 2v, |
|
|
|||||||
|
|
|
|
|
|
|
|
||
v v |
v |
v |
v, v |
v |
u' v |
9a2 |
h2 |
/c, |
|
12 |
13 |
16 |
17 |
15 |
14 |
|
|
|
|
где c 
 a2 h2 .
a2 h2 .
Таким образом, кинематически непротиворечивое поле скоростей подтверждает изменяемость системы, обнаруженную из равенства нулю определителя системы уравнений равновесия узлов. Заметим, что известные достаточные геометрические признаки изменяемости здесь не работают. Не удовлетворяются в этом случае и условия существования замкнутой цепи [15]. Предложенный алгоритм нахождения поля скоростей имеет особенность, связанную с выбором начальной точки цепочки графов. Здесь выбран шарнир 5, которому была назначена нулевая скорость. Недостатком алгоритма является то, что начальная точка подбирается опытным путем, простым перебором вариантов. Если, например, начинать с шарнира 10, двигаясь слева направо, то последовательность {1,10} 11, {1,10} 2 двузвенников с двумя известными скоростями (определенными на предыдущих шагах) обрывается после графа {2,11} 3.
Рис. 3. Схема распределения возможных скоростей изменяемой фермы, n = 3
Такую же схему возможных скоростей можно получить и для других значений n, кратным трем. Исключим эти числа из рассмотрения, введя новую переменную
n (6k ( 1)k 3) / 4 |
(1) |
для получения зависимости решений от числа панелей.
Кинематика пластического разрушения пространственных ферм рассматривалась в [9]. 2. Расчет усилий. Решение системы линейных уравнений в системе Maple дает аналитические выражения для всех усилий. Кроме этого, операторы Maple позволяют получить наглядную картину распределения усилий в стержнях в численной моде этой программы. При a=3 м, h=2 м в случае распределенной нагрузки (рис. 4) построим диаграмму усилий
(рис. 5).
Рис. 4. Ферма под действием равномерно распределенной нагрузки по нижнему поясу при n = 4
116
Выпуск № 3 (63), 2021 |
ISSN 2541-7592 |
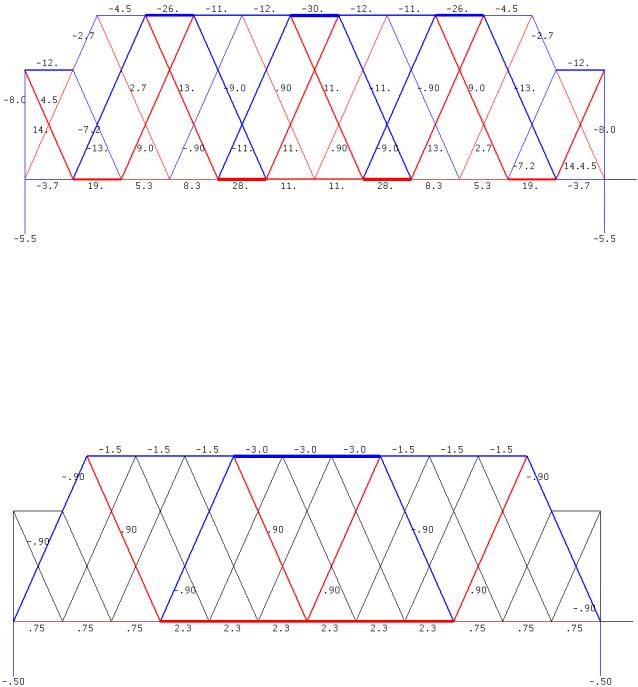
Красным цветом выделены растянутые стержни, синим — сжатые. Значение усилий отнесено к величине P.
Рис. 5. Распределение усилий в случае равномерной нагрузки, n = 5, k = 4
Чередование величины усилия в поясах характерно для многорешетчатых ферм под действием равномерной нагрузки. Заметим также, что усилия в некоторых стержнях решетки сопоставимы по величине с усилиями в поясах.
Распределение усилий в стержнях фермы под действием сосредоточенной силы в середине нижнего пояса показано на рис. 6. Бо´льшая часть стержней в решетке не загружена, стержни верхнего пояса сжаты, усилия по поясу монотонно увеличиваются (по модулю) от края к середине. Нижний пояс растянут.
Рис. 6. Распределение усилий в случае равномерной нагрузки, n = 5, k = 4
Для вывода формулы зависимости прогиба от числа панелей не требуется выписывать усилия во всех стержнях. Наиболее интересными для анализа напряженного состояния являются сжатые стержни в середине верхнего и растянутые в нижнем поясе. Выпишем выражения для усилия SO (см. рис. 1), полученные по результатам статического анализа ферм с последовательно увеличивающимся числом панелей:
SO 4Pa/h, 7Pa/ h, 15Pa/h, 20Pa/ h, 32Pa/ h, ... .
117
Научный журнал строительства и архитектуры
Рекуррентное уравнение для |
этой последовательности, полученное |
оператором |
||
rgf_findrecur, имеет вид: |
|
|
|
|
SO,k SO,k 1 2SO,k 2 2SO,k 3 SO,k 4 SO,k 5. |
|
|||
Решение этого уравнения имеет вид: |
|
|||
SO Pa(6k2 |
2(( 1)k 9)k 3( 1)k 3)/(8h). |
|
||
Аналогично получается зависимость усилия в среднем стержне нижнего пояса от числа |
||||
панелей: |
|
|
|
|
S Pa(6k2 |
2(( 1)k 3)k ( 1)k 5)/(8h). |
|
||
U |
|
|
|
|
3. Прогиб и смещение опоры. Для вычисления прогиба фермы (вертикальное смеще- |
||||
ние узла C) под действием нагрузки используется формула Максвелла-Мора: |
|
|||
|
ns |
|
|
|
N jN |
jlj / (EF), |
(2) |
||
j 1
где N j — усилия в стержне j фермы от приложенной нагрузки; N j — усилие от единичной силы, направленной в сторону искомого смещения и приложенной к точке C; lj — длина
стержня; EF — жесткость стержней. Рассмотрим нагрузку, равномерно распределенную по узлам нижнего пояса.
Рассчитывая последовательно фермы при k = 1, 2, 3,…, получаем вид решения, не зависящий от числа панелей:
|
C |
a3 C |
2,k |
c3 |
C |
h3 |
|
|
P |
1,k |
|
|
3,k |
|
. |
(3) |
|
|
EFh2 |
|
|
|||||
|
|
|
|
|
|
|||
Коэффициенты C1,k, C2,k, C3,k образуют последовательности, общие члены которых можно получить в системе Maple. Коэффициенты C1,k при a3 образуют следующую числовую последовательность, первые десять элементов которой имеют вид: 18, 27/2, 411/2, 234, 984, 2403/2, 6267/2, 3816, 7794, 18675/2. Всего же требуется иметь 18 элементов,
т. е. необходимо последовательно рассчитать прогиб 18 ферм, для того чтобы найти общий член последовательности. Это выясняется при использовании оператора rgf_findrecur системы Maple для получения рекуррентного уравнения, которому удовлетворяют эти числа. Меньшая длина последовательности не дает уравнение. Уравнение получается девятого порядка:
C1,k |
C1,k 1 |
4C1,k 2 4C1,k 3 6C1,k 4 6C1,k 5 |
4C1,k 6 4C1,k 7 C1,k 8 |
C1,k 9. |
(4) |
|
Решение этого уравнения дает оператор rsolve: |
|
|
|
|||
C |
(30k4 |
20(1 ( 1)k )k3 6(21 23( 1)k )k2 |
112(1 ( 1)k )k 9( 1)k |
9)/32. |
|
|
1,k |
|
|
|
|
|
|
Два других коэффициента получаются аналогично: |
|
|
||||
|
|
C2,k (6(13 12( 1)k )k2 (58 74( 1)k )k 3( 1)k 3)/16, |
|
(5) |
||
|
|
C |
k(1 ( 1)k ). |
|
|
|
|
|
|
|
|
||
|
|
3,k |
|
|
|
|
Решение (3) с коэффициентами (4), (5) представляет собой искомую зависимость в случае распределенной нагрузки по нижнему поясу. При загружении середины пролета сосредоточенной силой (рис. 1) решение будет иметь вид (3) с коэффициентами:
118
Выпуск № 3 (63), 2021 ISSN 2541-7592
C1,k (4k3 2(1 ( 1)k )k2 2(12 11( 1)k )k 17( 1)k 17)/8,
C2,k (6(5 4( 1)k )k 17( 1)k 17)/8,
C3,k 1 ( 1)k.
Порядок рекуррентных уравнений для определения коэффициентов в этом случае меньше, сами коэффициенты имеют более простой вид.
Для определения формулы зависимости смещения опоры от числа панелей описанную выше процедуру надо повторить для случая единичной силы, приложенной горизонтально к левой опоре. Расчет по формуле (1) для ферм с увеличивающимся числом панелей дает следующие величины сдвига:
1 4Pa2 /(hEF), 2 9Pa2 /(hEF), 3 57Pa2 /(hEF),
4 90Pa2 /(hEF), 5 230Pa2 /(hEF), ... .
Обобщая эти решения, получаем следующую зависимость смещения от числа панелей:
a2kP(6k2 3(1 ( 1)k )k 5( 1)k 1)/ (4hEF).
Следует напомнить, что действительное число панелей n выражается через число k по формуле (1).
4. Анализ решения. Рассмотрим решение задачи о прогибе фермы под действием равномерной нагрузки по нижнему поясу (3) с коэффициентами (4), (5). Если зафиксировать величину суммарной нагрузки, не зависящую от числа панелей, то P0 P(2n 1).
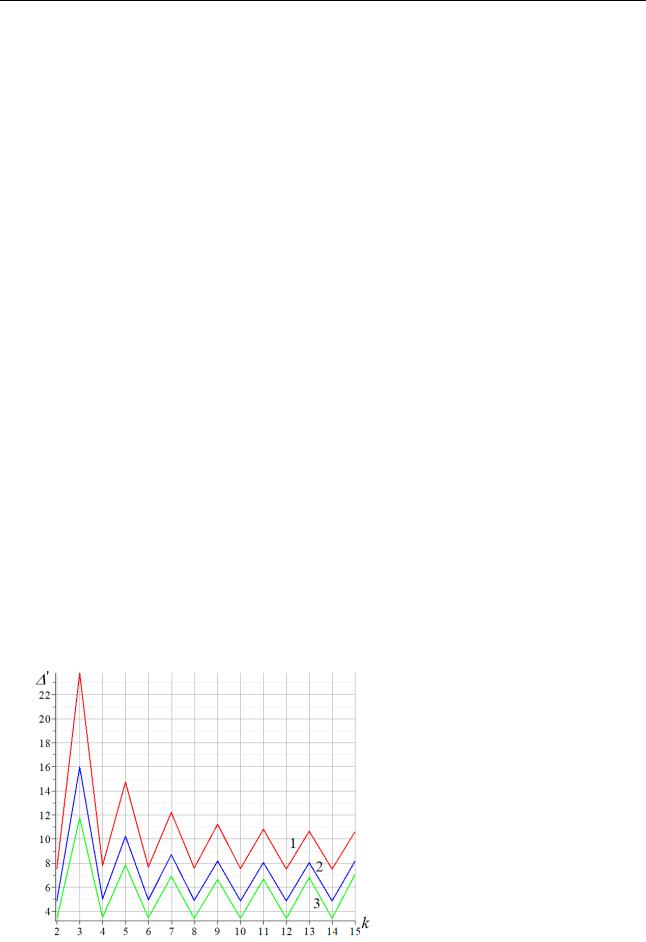
Построим графики зависимости от числа панелей безразмерного прогиба
' EF /(P0L),
где обозначена длина пролета L 2(n 1)a 100м (рис. 7). Полученная зависимость имеет характерный для решетчатых ферм скачкообразный характер. С увеличением числа панелей величина скачков уменьшается. Относительный прогиб ферм, имеющих один и тот же пролет, но отличающихся лишь на одну панель, может различаться в несколько раз. При k = 3, h = 6 м имеем ' 11,7 , а при k = 4 прогиб в три раза меньше: ' 3,5. По формуле (1) числам k = 3 и k = 4 соответствуют n = 4 и n = 5. Эта особенность конструкции фермы обращает внимание на выбор числа панелей.
Рис. 7. Зависимость относительного прогиба от числа панелей: 1— h = 4 м;
2— h = 5 м; 3 — h = 6 м
119