

Основы теории механизмов и машин. Кирпичев Ю.В., Кирпичев И.Ю
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
Ю.В. Кирпичев И.Ю. Кирпичев Б.Б. Еськов
ОСНОВЫ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2005
УДК 531.8 - 621.01
Кирпичев Ю.В., Кирпичев И.Ю., Еськов Б.Б. Основы теории механизмов и машин: Учеб. пособие. Воронеж: Воронеж. гос. техн. ун-т,
2005. 108 с.
Учебное пособие содержит основные материалы по классификации механизмов, анализу механизмов с высшими и низшими кинематическими парами. Рассмотрены основные элементы синтеза зубчатых и кулачковых механизмов. Даны рекомендации по выбору факторов, определяющих в целом работоспособность механизмов и их деталей.
Учебное пособие предназначено для студентов второго курса очной формы обучения.
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 150200 ”Машиностроительные технологии и оборудование”, специальности 150202 “Оборудование и технология сварочного производства”, дисциплине “Теория механизмов и машин”.
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD и содержится в файле “ТММ.doc”.
Табл. 1. Ил. 57. Библиогр.: 6 назв.
Научный редактор д-р техн. наук, проф. Д.В. Хван
Рецензенты: кафедра “Транспортные машины” Воронежского государственного архитектурно-строительного университета (зав. кафедрой д-р техн. наук, проф. Ю.Ф. Устинов); канд. техн. наук, доц. Ю.И. Калинин
©Кирпичев Ю.В., Кирпичев И.Ю., Еськов Б.Б., 2005
©Оформление. Воронежский государственный технический университет, 2005
ВВЕДЕНИЕ.
КРАТКИЕ СВЕДЕНИЯ ИЗ ИСТОРИИ РАЗВИТИЯ ТЕОРИИ МЕХАНИЗМОВ М МАШИН
Теория механизмов и машин является одной из старейших наук, возникновение и развитие которой обусловлено потребностями практики. Известно, например, что при постройке египетских пирамид применялись простейшие механизмы и механические устройства: рычаги, блоки, наклонная плоскость, однако дальнейшее развитие теории механизмов и машин следует, отнести к значительно более поздним временам, когда в результате накопления опыта стали возможными некоторые обобщения и частично выкристаллизовались, методы этой науки. В этом смысле датой рождения науки о машинах и механизмах можно считать конец ХVШ века. Задачи теории механизмов и машин рассматривались ранее в курсах прикладной механики, выделившейся из состава теоретической механики более 180 лет тому назад, теория механизмов и машин оформилась как самостоятельная ветвь науки в XX в.
В 1724 г. по инициативе Петра I была основана Российская Академия наук, деятельность которой с первых же дней существования была посвящена решению практических задач по постройке сооружений и машин, развитию отечественного кораблестроения, артиллерии и другой техники. Достойный вклад в развитие практической механики в России в ХVШ в. внѐс гениальный учѐный – академик М.В. Ломоносов, разработавший конструкции машин для производства стекла и испытаний; материалов. Его научные открытия послужили источником творчества русских умельцев, изобретателей и конструкторов: И.И. Ползунова – творца паровой машины; И.П. Кулибина – создателя механизма протеза, часов-автоматов, «водохода», «самокатки» и др.; К.Д. Фролова – строителя механизированного комплекса рудо- и водоподъѐмных устройств; отца и сына Е.А. и М.Е. Черепановых, построивших первый в России паровоз, и многих других. Интересно отметить, что конструкция «самокатки», созданной И.П. Кулибиным в 1791 г., носили черты будущих автомобилей: она имела устройства для переключения зубчатых передач и свободного хода, тормоз, управляемые колѐса.
В это же время процветала плодотворная деятельность величайшего математика и механика – академика Л. Эйлера, разработавшего теорию плоских зацеплений и предложившего эвольвентный профиль зубьев колѐс. Эти исследования послужили основой для создания французом Т. Оливье общей теории пространственных зацеплений, которая была переработана и дополнена одесским профессором Х. Гохманом – автором фундаментального труда «Кинематика машин» (1890г.).
К середине XIX века в России выросла плеяда талантливых учѐных заложивших основы современной теории механизмов и машин. Основателем русской школы этой науки был великий математик – академик П.Л. Чебышев (1821–1894 гг.), которому принадлежит ряд оригинальных исследований,
3
посвящѐнных синтезу механизмов, теории регуляторов и зубчатых зацеплений, структуре плоских механизмов. Он создал схемы свыше 40 различных механизмов и большое количество их модификаций. Академик И.А. Вышнеградский явился основателем теории автоматического регулирования; его работы в этой области нашли достойного продолжателя в лице выдающегося русского учѐного – профессора Н.Е. Жуковского, а также словацкого инженера А. Стодолы и английского физика Д. Максвелла. Н.Е. Жуковскому принадлежит также ряд работ, посвящѐнных решению задачи динамики машин (теорема о жестком рычаге), исследованию распределения давления между витками резьбы винта и гайки, трения смазочного слоя между шипом и подшипником, выполненных им в соавторстве с академиком С.А. Чаплыгиным. Глубокие исследования в области теории смазочного слоя, а также по ременным передачам выполнены почетным академиком Н.П. Петровым. В 1886 г. профессор П.К. Худяков заложил научные основы курса деталей машин. Ученик И.Е. Вышнеградского, профессор В.Л. Кирпичев известен как автор графических методов исследований статики и кинематики механизмов. Он первым начал читать (в Петербургском технологическом институте) курс деталей машин как самостоятельную дисциплину и издал в 1898 г. первый учебник под тем же названием. В его популярной до сих пор книге «Беседы о механике» решены задачи равновесия сил, действующих в стержневых механизмах, динамики машин и др. Выдающийся советский учѐный профессор Н.И. Мерцалов дал новые оригинальные решения задач кинематики и динамики механизмов.
В 1914 г. он написал труд «Динамика механизмов», который явился первым систематическим курсом в этой области. Н.И. Мерцалов первым начал исследовать пространственные механизмы. Академик В.П. Горячкин провѐл фундаментальные исследования в области теории сельскохозяйственных машин.
Профессор Л.А. Ассур разработал строгую в научном отношении классификацию плоских шарнирно-рычажных механизмов, которая послужила базой для многочисленных исследований в этой области советских учѐных. В XIX и XX столетиях большое значение для развития практической механики в России приобретают исследования академиков М.В. Остроградского и А.М. Ляпунова, профессора И.В. Мещерского и др.
Достижения отечественной школы теории механизмов и машин в дореволюционный период заслуживают высокой оценки. Но подлинный расцвет она получила в связи с бурным развитием советского машиностроения и в настоящее время занимает одно из ведущих мест в мире. За отводящееся на курс время трудно проанализировать или даже перечислить многочисленные и значительные исследования советских учѐных в этой области, упомянем лишь о некоторых из них.
На протяжении более сорока лет в Москве плодотворную научноисследовательскую и научно-организаторскую деятельность в области теории механизмов и машин вѐл академик И.И. Артоболевский. Его труды по теории структуры, по теории пространственных механизмов, синтезу и
4
динамике машин и механизмов стали классическими. Он создал новые методы проективной и кинематической геометрии и аналитической динамики. Академик Н.Г. Бруевич приложил методы теории вероятностей к исследованию погрешностей действия машин и приборов и явился основателем теории точности механизмов. Он также развил аналитические методы исследования плоских и пространственных механизмов.
«Теория механизмов и машин» представляет собой один из важных разделов прикладной механики, в котором изложены методы исследования и построения механизмов и машин. Под исследованием механизмов и машин понимают изучение движения звеньев машин и их точек. Построение, или синтез, механизмов представляет разработку рациональных методов определения параметров механизмов, машин и приборов по заданным функциям их движения.
В условиях научно-технической революции успешная производственная и научно-исследовательская деятельность специалиста невозможна без соответствующей теоретической, практической и общеинженерной конструкторско-технологической подготовки.
Этот курс являемся фундаментальным в системе подготовки инженеров. Структура и содержание курса предусматривает обязательное последовательное изучение составляющих его дисциплин и их разделов при творческой направленности лабораторного практикума и курсового проектирования.
Эффективность изучения курса может быть достигнута при условиях: правильной дозировки учебной нагрузки (в целом и по отдельным разделам и главам); чѐткости и ясности выдаваемых заданий; обеспеченности учебными и другими пособиями высокого качества (системности, краткости, обстоятельности); систематичности в руководстве работой студентов, осуществляемом по плану; своевременного контроля сроков, объѐма и качества выполнения заданий и проектов.
5
Глава 1. СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
1.1. Основные понятия теории механизмов и машин (машина, механизм, звено, кинематическая пара, высшие и низшие пары)
Машина состоит из трех основных частей - двигателя, передаточного механизма и исполнительного органа. Передаточный механизм служит для преобразования вида движения, изменения величины и направления скорости исполнительного органа. Передаточные механизмы машин и приборов имеют одинаковые для всех механизмов или определенных групп признаки, что дает возможность разработать общие методы их исследования и проектирования. С точки зрения кинематики безразлично, исследуется ли механизм двигателя внутреннего сгорания или отсчетного устройства манометрического прибора, если у них одинаковые кинематические схемы. Несмотря на различное назначение этих двух объектов и полную несхожесть их внешнего вида, в основе лежит один и тот же кривошипно-ползунный механизм. Методы кинематического исследования этих механизмов одинаковы.
Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено-стойку (станина, корпус, шасси и т.д.) и подвижные звенья, которые могут совершать вращательное, поступательное и сложное движение. Звеном может быть одна или несколько жестко связанных между собой деталей.
а) |
в) |
б)
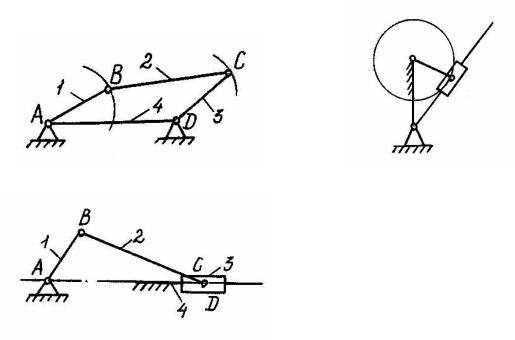
Рис. 1.1. Механизм шарнирного четырехзвенника а) четырехзвенник; б) кривошипный механизм; в) кулисный механизм
6
В зависимости от характера движения и назначения звенья имеют определенные названия. На рис. 1.1: звено 1 - кривошип; звено 2, совершаются сложное плоско-параллельное движение - шатуном; звено 3, совершающее качательное движение - коромыслом; неподвижное звено 4 является стойкой.
Кулисные механизмы, в состав которых входят два ползуна, образуют тангенсные и синусные механизмы (рис. 1.2)
а) |
б) |
Рис. 1.2. Тангенсный (а) и синусный (б) механизмы
Широкое применение в технике нашли также кулачковые механизмы, отличающиеся большим разнообразием кулачков, фрикционные и зубчатые механизмы.
Механизм является кинематической цепью, отличающейся определенностью движения всех звеньев относительно неподвижного звена - стойки. Звенья, на которые действуют движущие силы, называются ведущими, остальные - ведомыми. Следовательно, механизмом называется кинематическая цепь, у которой при заданном движении одного или нескольких звеньев относительно звена, принятого за стойку, остальные звенья совершают вполне определенные движения.
При кинематическом исследовании механизмов иногда удобнее движение задавать не ведущим звеньям, на которые действуют движущие силы, а другим. В этом случае такие звенья называются входными; последнее звено в кинематической цепи, движение которого является производным от положения входного звена, называется выходным.
Соединение двух звеньев, обеспечивающее определенное относительное движение, образует кинематическую пару. Элементами кинематической пары называются поверхности, линии или точки, по которым происходит подвижное соединение двух звеньев и которые ограничивают относительное движение этих звеньев. В зависимости от вида
7
элементов различают высшие и низшие кинематические пары. В высших кинематических парах элементами являются линии или точки. Кинематические пары, образованные элементами в виде поверхностей, называются низшими. Замыкание кинематических пар может быть геометрическим и силовым (пружина).
1.2. Классификация кинематических пар по числу степеней свободы и числу условий связи
Класс пары. Свободное звено в пространстве обладает шестью степенями свободы. Звено, входящее в кинематическую пару, теряет от одной до пяти степеней свободы. Класс кинематической пары определяется числом условий связи S, налагаемых на относительное движение звеньев. Различают пять классов кинематических пар. Если Н - число степеней
свободы звеньев кинематической пары, то: |
|
S = 6 - H |
(1.1) |
Например, в парах конструкции элементов позволяют осуществлять два независимых движения. Для них Н = 2 и S = 4, следовательно, эта пара - четвертого класса. Если одно вращательное движение Н = 1 и S = 5 - пара пятого класса.
Можно подобрать такую форму элементов пары, чтобы при одном независимом движении возникло второе - производное: в винтовой паре вращательное движение винта вызывает поступательное перемещение его вдоль оси. Такую пару следует отнести к пятому классу, т.к. имеется всего одно независимое движение (Н = 1).
Степень подвижности. Количество ведущих звеньев соответствует степени подвижности механизма W, т.е. степени свободы его относительно стойки. Если число подвижных звеньев плоского механизма n, число кинематических пар пятого класса - Р5, четвертого класса - Р4, то число возможных движений несоединенных в пары звеньев будет 3n, число условий связи, налагаемых парами пятого класса - 2Р5, парами четвертого
класса - Р4 и, следовательно, степень подвижности механизма: |
|
W = 3n - 2p5 - p4 - формула Чебышева |
(1.2) |
Когда рассматривают подвижность пространственного механизма, |
|
пользуются формулой Сомова-Малышева: |
|
W = 6n - 5p5 - 4p4 - 3p3 - 2p2 - p1 , |
(1.3) |
где р1, р2, р3 - число пар первого, второго, третьего классов. |
|
8
1.3.Избыточные связи и лишние степени свободы в механизме
Вформуле Чебышева не отражены размеры звеньев. Специальным подбором размеров некоторых звеньев можно получить фактическую степень подвижности, отличающуюся от подсчитываемой по формуле (1.2).
а) |
б) |
в) |
г) |
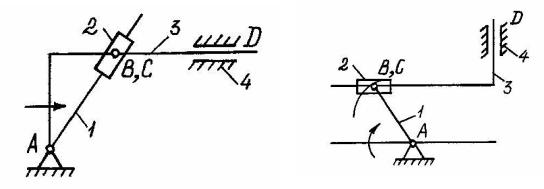
Рис. 1.3. Шарнирные и кулачковые механизмы
Например, в механизме, показанном на рис. 1.3, а, при наличии звена EF степень подвижности W = 3n - 2p5 - p4 = 3 4 - 2 6 - 0 = 0, но если принять дополнительное условие, касающееся размеров звеньев, а именно AB =º CD =ºEF (рис. 1.3, б) то, несмотря на то, что по подсчету по прежнему
9
W = 0, фактически степень подвижности W = 1 и механизм будет работать. При этих условиях звено EF можно исключить и степень подвижности не изменится. Такие звенья, наличие которых не влияет на подвижность механизма, налагают пассивные или избыточные условия связи и называются пассивными. В механизмы они вводятся для увеличения жесткости, лучшего распределения нагрузки, создания определенности направления движения и т.д. Введение пассивных звеньев требует высокой точности выполнения элементов кинематических пар.
В механизме на рис. 1.3, в, W = 3n - 2p5 - p4 = 3 3 - 2 3 - 1 = 2. Вторую подвижность вносит звено 3 - некруглый ролик. Если ролик сделать круглым (рис. 1.3, г), то характер относительного движения коромысла 2 будет таким же, как и в том случае, если ролик сделать неподвижным. В этом смысле степень свободы, вносимая роликом, является "лишней". При закрепленном
ролике n = 2, p5 = 2, p4 = 1 и W = 3 2 - 2 2 - 1 = 1.
Чаще всего звенья, создающие лишние степени свободы, вводят в
механизм для улучшения условий работы, повышения КПД (замена скольжения качением) и т.д. При структурном анализе пассивные звенья и лишние степени свободы условно исключают.
1.4. Замена в плоских механизмах высших кинематических пар цепями с низшими парами
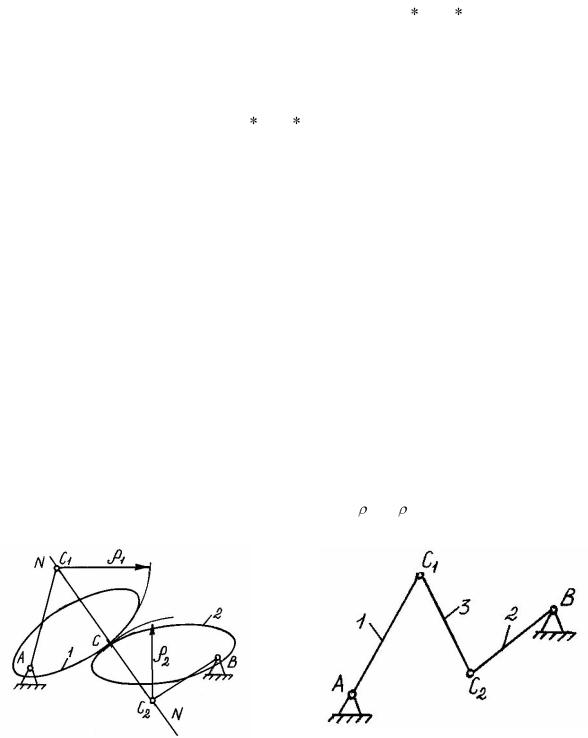
Распространенные методы изучения структуры механизмов разработаны для механизмов, в состав которых входят только низшие пары, поэтому при структурном анализе высшие пары (пары четвертого класса) условно заменяют кинематическими цепями, содержащими лишь пары пятого класса. Заменяющие цепи, естественно, должны быть структурно и кинематически эквивалентны заменяемым парам. Простейшая заменяющая цепь (рис. 1.4) будет состоять из одного звена 3, расположенного по нормали NN к профилям звеньев 1 и 2, образующих высшую кинематическую пару С. Длина звена 3 равна сумме радиусов кривизны 1 и 2.
Это звено образует пары пятого класса С1 и С2 со звеньями 1 и 2.
а) |
б) |
Рис. 1.4. Замена высшей пары на цепь с низшими |
|
10