

3143
.pdfдвижение общей для этих двух звеньев точки С - центра средней вращательной пары.
Рассмотрим движение звена 2 относительно звена 1. Эти звенья образуют вращательную пару, поэтому на основании теоремы о сложении скоростей в сложном движении скорость точки С на звене 2 складывается из
скорости VB2 переносного (поступательного) |
|
движения звена со скоростью |
|||||||||||||
VB и скорости VC2 B2 относительного (вращательного) движения звена 2 вокруг |
|||||||||||||||
точки В: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.6) |
VC |
VB |
VC B |
VB |
VCB |
|||||||||||
2 |
2 |
2 |
2 |
|
|
|
|
|
|
||||||
где VCB  2 LВC
2 LВC
Теперь определим скорость точки С, отнеся ее к 3 звену. Звено 3 образует со звеном 4 поступательную пару, поэтому скорость точки С3 можно представить как сумму двух скоростей: скорости VC4 точки С4,
совпадающей с точкой С3 и принадлежащей среде переноса (в данном случае примыкающему звену 4), и скорости точки С3 относительно точки С4 в поступательном движении звена 3 относительно звена 4 - VC3 C4 , т.е. :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.7) |
VC |
VС |
VС С |
4 |
VС |
VCС |
|||||||||||
3 |
4 |
3 |
|
|
|
4 |
|
|
4 |
|||||||
Точку С4 расположим на плоскости, жестко связанной со звеном 4. Зная закон движения этого звена, можно найти мгновенный цент? вращения (МЦВ) и при известном расстоянии его от точки С4 и угловой скорости 4 определить величину и направление скорости этой точки.
Систему уравнений (2.6) и (2.7) решим графически в выбранном
масштабе v |
( |
м / с |
) на плане скоростей (рис. 2.3, б). Откладываем от полюса |
|
|||
|
|
мм |
|
рv параллельно вектору скорости точки В отрезок pv в (мм) и через конец этого отрезка проводим прямую, являющуюся линией действия вектора VCB. Эта прямая перпендикулярна к линии ВС.
Далее из полюса pv плана скоростей параллельно вектору VC4 (рис. 2.3,
а) откладываем отрезок pvc4 = VC4 (мм). Через конец этого отрезка (точку С4)
v
проводим прямую, параллельную направляющей поступательной пары D, являющейся линией действия вектора относительной поступательной
скорости VCC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. Так как VC |
VC |
VC |
VB VCB |
VC |
VCC , векторные суммы |
|||||||||||||||
|
4 |
|
|
2 |
3 |
|
|
|
|
|
4 |
4 |
||||||||
определяются точкой пересечения линий действия относительных скоростей. Точку пересечения этих линий обозначим С, абсолютная скорость точки С определится из условия
Vc = (pvc) v .
Из плана скоростей получим также величины и направления векторов относительных скоростей: вращательной VCB - отрезок bc и поступательной VCC4 - отрезок C4C. Угловая скорость второго звена :
21
|
|
VCB |
|
(bc) |
v |
, |
(2.8) |
2 |
|
LBC |
|
(BC) |
|
||
|
|
|
|
|
|||
|
|
|
|
|
|||
а направление ее определяется мысленным переносом вектора относительной скорости VСВ - отрезка bc плана скоростей в точку С на плане положения группы.
Пользуясь планом скоростей, можно найти скорость любой точки на звене. Скорость точки S на втором звене определяется из условия представления сложного движения звена 2 как поступательного со скоростью VB и вращательного вокруг точки В, а также как поступательного со скоростью Vc и вращательного вокруг точки С:
|
|
|
|
|
|
|
|
|
|
VS |
VB |
VSB } |
(2.9) |
||||||
|
|
|
|
|
|
||||
VS |
VC |
VSC |
|
||||||
Решая эту систему графически, определяют точку S - конец |
|||||||||
вектора VS. |
|
|
|
|
|
|
|
||
Из построения следует, что треугольник csb |
на плане скоростей |
||||||||
подобен треугольнику CSB на плане положений группы и повернут относительно него на 90°. Правильность построения определяется одинаковым порядком букв при обходе контура звена и контура относительных скоростей на плане скоростей в одном и том же направлении.
План ускорений. Исходными данными для построения плана ускорений являются план положения группы, план скоростей (рис. 2.3, а, б) и ускорения звеньев, примыкающих к данной группе. При построении плана ускорений полностью применимы рассуждения, использованные при решении задачи об отыскании скоростей звеньев. Ускорение точки В2
известно, т.к. она совпадает с точкой В1, т.е. аВ |
|
аВ |
аВ , угловое ускорение |
|
2 |
1 |
|
звена 3 известно, т.к. оно образует со звеном 4 поступательную пару, т.е. e3=e4.
Для нахождения ускорения любой точки звеньев 2 и 3 дополнительно надо знать ускорение хотя бы одной точки на каждом из этих звеньев. В качестве такой точки следует использовать центр шарнира С, являющийся общей точкой для звеньев 2 и 3. Рассматривая вращательное движение звена 2 вокруг точки В и поступательное - звена 3 относительно звена 4, записываем следующие векторные уравнения:
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
а |
c |
а |
в |
|
а |
a |
св |
|
|
|
||||||||
|
|
|
|
|
|
|
св |
|
|
|
} |
(2.10) |
||||||
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
r |
||
ac |
ас |
|
|
асс |
|
асс |
||||||||||||
4 |
|
4 |
|
4 |
|
|
||||||||||||
Систему уравнений (2.10) решим графически. На чертеже (рис. 2.3, в) обозначим полюс плана ускорений ра и выберем масштаб построения плана
ускорений |
|
( |
м / с2 |
) . |
Откладываем |
от полюса ра параллельно вектору |
|||||
а |
мм |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ускорения а |
|
отрезок |
p b |
aB |
(мм). |
Нормальное ускорение а |
|
n |
точки С в |
||
В |
|
СВ |
|
||||||||
|
|
|
|
a |
|
|
|
|
|
||
a
22
относительном движении направлено от точки С вдоль звена 2 к точке В; величину его, исходя из построенного плана скоростей (рис. 2.3, б), определим по формуле:
|
|
|
VCB |
2 |
|
bc |
|
2 |
|
|
|
|
|
|
|
||
|
n |
|
|
|
|
V |
|
|
|
(2.11) |
|||||||
|
аCB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
LBC |
|
BC |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Из точки b плана ускорений проводим линию действия ускорения |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
||
а |
n в направлении от точки С к точке В и откладываем отрезок b |
aCB |
. |
||||||||||||||
|
|||||||||||||||||
|
CB |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
Из точки n перпендикулярно к отрезку bn |
проводим линию |
|||||||||||||||
действия тангенциального ускорения |
|
аCB . Далее из полюса ра |
проводим |
||||||||||||||
линию параллельно известному направлению ускорения |
аС |
(рис. 2.3, а) и |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
откладываем отрезок: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aC |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
pa c4 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
Ускорение Кориолиса (поворотное ускорение): |
|
|
|
(2.12) |
||||||||||||
|
aCC |
k |
2 |
4VCC |
|
|
2 4 C4C V |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aCC |
k |
||
|
откладываем на плане ускорения в |
|
виде отрезка |
|
c k |
4 |
(мм). |
||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
a
Направление указанного отрезка определяется путем поворота вектора относительной скорости С4С на 90° в сторону
вращения среды поворота - звена 4. Из точки К проводим линию
действия |
ускорения aCC |
n , параллельную направляющей поступательной |
|
|
|
4 |
|
пары, т.е. |
перпендикулярно к вектору ускорений aCC |
k . Пересечение линий |
|
|
|
|
4 |
действия aCB и aCC4 r определит наложение точки C.
и aCC4 r определит наложение точки C.
Из плана ускорения получим также величины и направления векторов относительных ускорений aCB  bc
bc a (м/с2) и aCC4
a (м/с2) и aCC4  c4c
c4c a (м/с2). Угловое ускорение звена 2 определится по формуле:
a (м/с2). Угловое ускорение звена 2 определится по формуле:
e |
|
aCB |
|
nc |
a |
(2.13) |
2 |
LBC |
|
BC |
|
||
|
|
|
|
|
Направление e2 устанавливается путем мысленного переноса вектора nc в точку С и определения направления вращения звена 2 вокруг точки В под влиянием этого вектора.
Пользуясь планом ускорений, можно найти ускорение любой точки на звене 2 и 3. Например, требуется определить ускорение точки S на звене 2. На основании известного положения о подобии фигур звена и плана относительных ускорений строим на отрезке bc плана ускорений треугольник csb, подобный треугольнику CSB на звене 2, соблюдая при этом одинаковую последовательность расположения букв при обходе контуров этих треугольников в одном направлении. Соединяя полученную в результате
23

построения точку S с полюсом ра, получаем отрезок pas, определяющий в масштабе ускорение точки S:as = (pas) а
Аналитический метод. Этот метод позволяет определять скорости и ускорения с более высокой точностью. Обычно применяют метод последовательного дифференцирования функции перемещения точки, скорость и ускорение которой необходимо определить. Функцию перемещения S=S(t) или S=S( ) можно получить из геометрических соображений, как, например, это сделано для кривошипно-ползунного механизма - формула (2.5), а ее скорость и ускорение - путем дифференцирования уравнений (2.3).
Дифференцируя уравнения (2.3) по обобщенной координате 1 (углу поворота ведущего звена), получают не истинную угловую скорость, а
безразмерную величину |
d |
i |
, получившую название аналога угловой |
|
d |
1 |
|||
|
|
скорости. Связь между аналогом скорости и действительной угловой скоростью i-го звена определится из соотношения:
|
|
d i |
|
d 1 d 1 |
|
d |
i |
d |
i |
, |
|||
i |
|
dt |
|
1 |
|
dt |
|
d |
|
1 |
d |
1 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
||
т.е. угловая скорость i-го звена |
i |
равна |
произведению угловой |
||||||||||
скорости ведущего звена |
i на |
аналог |
скорости. |
|
Продифференцировав |
||||||||
уравнения (2.3) и подставив значение аналога скорости, получаем уравнения для определения угловой скорости, получаем уравнения для определения
угловой скорости шатуна |
2 (рис. 2.2) и относительной скорости звена 3 - |
|||||||||||||||||
30= с: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 sin 1 |
|
|
|
2 2 sin 2 |
c |
|
|
|
(2.17) |
|||||||
|
|
1 1 cos 1 |
|
|
2 2 cos |
|
|
0 |
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|||||||||
Определим значение |
2 |
из второго уравнения (2.17) : |
|
|
||||||||||||||
|
|
|
|
1 |
|
|
cos 1 |
|
|
|
cos 1 |
|
|
|
||||
|
|
2 |
1 |
2 |
|
|
cos |
2 |
|
|
1 cos |
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и подставим его в первое уравнение, с учетом формулы (2.4), получим |
||||||||||||||||||
значение с: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 sin |
|
1 2 sin |
|
|
|
|
cos |
|
1 |
|
1 1 (sin 1 tg |
2 cos 1 ) |
(2.18) |
||||
с |
1 |
|
2 |
|
|
cos |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При |
|
|
вторичном |
||
дифференцировании уравнений (2.3) с использованием понятия аналога
углового |
ускорения, |
представляющего |
вторую производную по углу |
||||
|
|
|
d |
2 |
|
|
|
поворота |
ведущего |
звена |
|
i |
|
, можно определить действительное |
|
d 1 |
2 |
||||||
|
|
|
|
|
|
||
ускорение i-го звена, умножив аналог углового ускорения на квадрат угловой
скорости ведущего звена 12. При этом принимая, что |
1= const, получают |
уравнения для определения углового ускорения шатуна |
2 и относительного |
ускорения звена а30 ас: |
|
24

|
1 |
2 |
cos |
1 |
|
2 |
2 |
cos |
2 |
|
2 |
2 |
sin |
2 |
a |
c |
|
|
|
1 |
|
|
2 |
|
|
|
|
|
(2.19) |
||||||||
|
|
2 |
sin |
|
|
|
2 |
sin |
|
|
|
|
|
cos |
|
0 |
|
|
1 |
1 |
2 |
2 |
2 |
2 |
2 |
|
|
||||||||||
|
1 |
|
|
2 |
|
|
|
|
|
|
||||||||
из уравнения (2.19) получим значение:
2 |
|
1 |
sin |
1 |
2 |
|
2 |
sin |
2 |
|
|
|
1 |
|
|
2 |
|
|
. |
||||
2 |
|
|
|
2 cos |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
|
|
|
|
|
||
Получив значения угловых скоростей и ускорений, можно определить скорость и ускорение любой точки звеньев механизма. В тех случаях, когда 
 1/3, пользуются приближенными формулами при определении перемещения, скорости и ускорения ползуна. При этом перемещение ползуна Sc измеряем от мертвого положения Со (рис. 2.2):
1/3, пользуются приближенными формулами при определении перемещения, скорости и ускорения ползуна. При этом перемещение ползуна Sc измеряем от мертвого положения Со (рис. 2.2):
Sc = 1 + 2 - Xc , или с учетом (2.5) получим:
S |
|
1 |
(1 |
cos |
1 |
) |
|
2 |
(1 |
|
|
1 |
2 sin2 |
) |
(2.20) |
|
c |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
Раскладывая в ряд радикал, входящий в формулу (2.20) по биному |
||||||||||||||||
Ньютона и ограничиваясь его первыми двумя членами, получим: |
|
|||||||||||||||
|
Sc |
|
1 (1 |
cos 1 ) |
|
( |
|
2) sin2 |
1 |
|
(2.21) |
|||||
После дифференцирования скорость |
|
с |
и ускорение ас определяют по |
|||||||||||||
формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
1 1 (sin |
1 + |
/2 sin 2 |
1) |
|
(2.22) |
|||||||
|
aс |
|
|
12 1 (cos |
1 + |
|
cos 2 |
1) |
|
(2.23) |
||||||
25
Глава 3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
СВЫСШИМИ ПАРАМИ
3.1.Соотношение скоростей в высшей кинематической паре
Вращающееся ведомое звено
а) |
б) |
в)
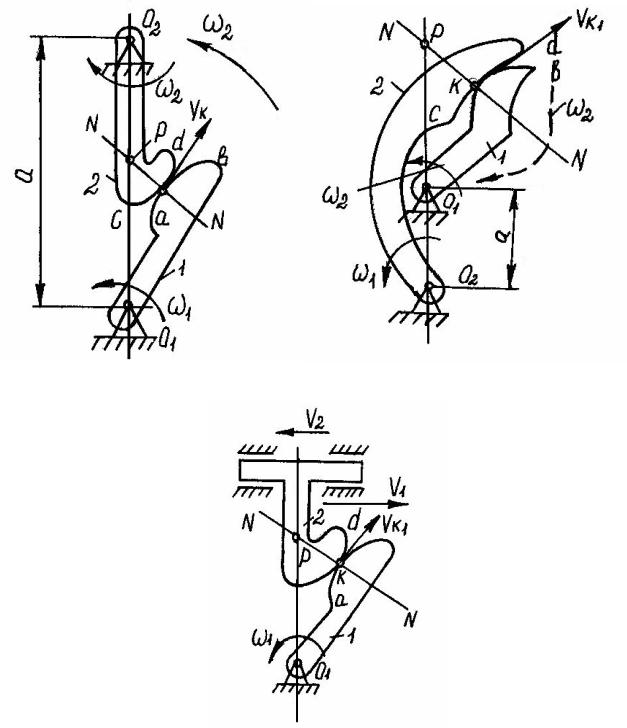
Рис. 3.1. К теореме о соотношении скоростей в высшей кинематической паре
26

Предположим, что движение от ведущего звена 1 к ведомому 2, вращающихся вокруг параллельных осей О1 и О2, передается при помощи высшей кинематической пары (рис. 3.1). Рабочими профилями звеньев являются кривые ab и cd.
Если сообщить всей системе вращение с угловой скоростью (- 2), то первое звено будет совершать два вращательных движения: с угловой скоростью 1 вокруг оси О1 и с угловой скоростью (- 2) вокруг оси О2, а второе будет неподвижным. На основании теоремы о сложении угловых скоростей оба эти движения можно заменить одним - вокруг мгновенной оси
вращения - с относительной угловой скоростью |
= 1+ (- |
2). |
|
Как известно, при этом положение мгновенного |
центра |
вращения |
|
(МВЦ) - точки Р, через который проходит |
мгновенная ось |
вращения |
|
(перпендикулярно к плоскости рисунка), в относительном движении определяется отношением:
|
О1Р |
|
2 |
(3.1) |
|
О2 Р |
1 |
||
|
|
|||
При внешнем касании положение МВЦ (точки Р) находится между |
||||
центрами О1 и О2 (рис. 3.1, а), отрезки РО1 |
и РО2 имеют разное направление, |
|||
и звенья 1 и 2 вращаются в разные стороны; если же точка Р находится по одну сторону от центров О1 и О2 (внутреннее касание), то отрезки РО1 и РО2 имеют одинаковое направление (рис. 3.1, б) и звенья 1 и 2 вращаются в одну сторону.
Относительная скорость точки контакта К, принадлежащей звену 1, к  направлена перпендикулярно к отрезку РК в сторону, определяемую направлением . Так как относительная скорость к всегда направлена по общей касательной к профилям cd и ab в точке К, то отрезок РК является нормалью к соприкасающимся профилям в точке К. На основании указанного можно так сформулировать теорему о соотношении скоростей в высшей паре: нормаль в точке контакта профилей двух звеньев, совершающих вращательное движение, делит межосевое расстояние на отрезки, длины которых обратно пропорциональны угловым скоростям этих
направлена перпендикулярно к отрезку РК в сторону, определяемую направлением . Так как относительная скорость к всегда направлена по общей касательной к профилям cd и ab в точке К, то отрезок РК является нормалью к соприкасающимся профилям в точке К. На основании указанного можно так сформулировать теорему о соотношении скоростей в высшей паре: нормаль в точке контакта профилей двух звеньев, совершающих вращательное движение, делит межосевое расстояние на отрезки, длины которых обратно пропорциональны угловым скоростям этих
звеньев.
Поступательно движущееся звено. Когда ведомое звено, образующее с ведущим высшую кинематическую пару, совершает поступательное движение с линейной скоростью 2 (рис. 3.1, в), положение МЦВ в относительном получают аналогичным путем. При этом нормаль к соприкасающимся профилям в точке их контакта отсекает на перпендикуляре, опущенном из центра вращения ведущего звена на
направление движения ведомого звена, отрезок О1Р = 2 .
1
Геометрические места положений МВЦ на ведущих и ведомых звеньях представляют собой центроиды в относительном движении. Форма центроид зависит от соотношения скоростей этих звеньев.
27

Аксоидные поверхности
а) |
в) |
б) |
г) |
Рис. 3.2. К определению аксоидных поверхностей
Геометрическое место мгновенных осей вращения образует в относительном движении аксоиды. При передаче вращения между звеньями, оси которых параллельны, аксоиды представляют собой цилиндры (рис. 3.2, а - при внешнем касании, рис. 3.2, б - при внутреннем касании).
При передаче вращения между звеньями, оси вращения которых пересекаются, аксоидами относительного движения являются конусы с общей вершиной в точке О пересечения осей (рис. 3.2, в), а линия ОР будет мгновенной осью вращения.
В случае передачи вращения между двумя звеньями, оси которых перекрещиваются в пространстве (рис. 3.2, г), аксоиды представляют собой два гиперболоида вращения. Мгновенная ось вращения в этом случае проходит через точку Р, делящую кратчайшее расстояние О1О2 между осями в отношении:
28
О1Р |
|
tg |
1 |
, |
О2 Р |
|
tg |
2 |
|
|
|
где 1 и 2 - углы, образованные осями звеньев с осью мгновенного вращения и скольжения, которая должна быть параллельной вектору относительной скорости 
 1
1  2 . Передача движения от ведущего звена к ведомому при наличии высшей кинематической пары может происходить двояко:
2 . Передача движения от ведущего звена к ведомому при наличии высшей кинематической пары может происходить двояко:
1)за счет перекатывания без скольжения друг по другу звеньев, выполненных по форме аксоидов. В этом случае движение передается за счет сил трения, возникающих в зоне контакта этих звеньев при надавливании их друг на друга (фрикционные механизмы).
2)за счет давления звеньев (одного на другое), очерченных по определенным профилям (кулачковые и зубчатые механизмы). В этом случае между профилями, передающими движение, происходит не только перекатывание, но и относительное скольжение.
3)
Передаточное отношение.
Для двух звеньев 1 и 2, вращающихся с угловыми скоростями 1 и 2 под передаточным отношением понимают отношение их угловых скоростей:
i12 |
1 |
и |
i21 |
2 |
(3.2) |
|
|
|
|
||
|
2 |
|
|
1 |
|
Если движение осуществляется между параллельными осями, то передаточное отношение имеет знак "плюс", если угловые скорости звеньев имеют одно направление и знак "минус", если направления противоположны.
Независимо от принципа осуществления передачи вращения (трениям или давлением) на основании формулы (3.1) при внешнем контакте (рис. 3.2,
а) :
1 |
|
r2 |
(3.3) |
|
i12 |
|
|
|
|
|
|
r1 |
||
2 |
|
|
||
при внутреннем контакте (рис. 3.2, б) :
1 |
|
r2 |
(3.4) |
|
i12 |
|
|
|
|
|
|
r1 |
||
2 |
|
|
||
Для механизмов, в состав которых входят низшие пары, передаточное отношение представляет собой отношение линейных скоростей.
Передаточное отношение может быть выражено также через отношение угловых или линейных перемещений:
1 |
|
d 1 |
|
dt |
|
d |
1 |
или |
1 |
|
ds1 |
|
dt |
|
ds1 |
(3.5) |
||
i12 |
|
|
|
|
|
|
|
|
i12 |
|
|
|
|
|
|
|
||
|
|
dt |
|
d 2 |
|
d |
|
|
|
dt |
|
ds2 |
|
ds2 |
||||
2 |
|
|
|
2 |
|
2 |
|
|
|
|
||||||||
Механизмы можно разделить на две группы: с постоянным передаточным отношением и переменным. К первой относятся зубчатые и фрикционные механизмы, аксоидами которых являются цилиндры, конусы, гиперболоиды вращения, ко второй - кулачковые механизмы и механизмы с некруглыми зубчатыми колесами.
29
3.2 Механизмы с постоянным передаточным отношением
Простые механизмы. В механизме, состоящем из двух вращающихся звеньев (рис. 3.2, а, б), межосевое расстояние a = r2 r1 и с учетом формулы
(3.4) :
r1 |
|
a |
|
и |
r2 |
ai12 |
|
|
i12 |
1 |
i12 |
1 |
|||||
|
|
|
||||||
(знак "+" для внешнего контакта, знак " - " для внутреннего). Для механизмов с пересекающимися осями (рис. 3.2, в) :
1 |
|
|
r2 |
|
|
OP sin |
2 |
|
sin |
2 |
||||
i12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
OP sin |
|
|
|
sin |
|
|||
2 |
|
|
|
|
1 |
|
1 |
|||||||
При = 1+ 2 = 900: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i12 |
|
sin |
|
|
|
sin |
2 |
|
tg 2 |
|
|||
|
|
sin |
1 cos |
2 |
|
|
||||||||
|
|
|
|
|
|
|
||||||||
Для механизмов с перекрещивающими осями (рис. 3.2, г) :
1 |
|
sin |
2 |
|
i12 |
|
|
|
|
|
|
sin |
|
|
2 |
|
1 |
||
(3.6)
(3.7)
(3.8)
(3.9)
30