

3143
.pdf
|
S |
|
2 |
r 2 |
2 r cos |
|
|
|
|
|
(3.19) |
||
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
где |
|
0 , а |
arr cos |
l |
и |
|
arr cos |
l |
. |
|
||
|
|
|
0 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
r0 |
|
|
Задаваясь |
углом |
, находим |
текущий |
радиус-вектор |
и угол |
||||||||
поворота кулачка |
|
. Таким образом устанавливается связь между |
|||||||||||
углом поворота |
кулачка |
|
и |
перемещением |
толкателя S. |
Скорость и |
|||||||
ускорение толкателя определяют по формулам
|
|
dS |
|
|
d |
|
dS |
|
ds |
|
; |
|
|||||
|
|
dt |
|
|
dt |
|
d |
|
d |
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
a |
d 2 S d 2 |
d 2 S |
2 d 2 S |
; |
|||||||||||||
dt 2 |
|
|
dt 2 |
|
|
d 2 |
|
|
|
d |
2 |
||||||
Полученные зависимости для внецентренного кулачкового механизма приемлемы и для центральных кулачковых механизмов, у которых смещение l=0. При этом условии s  r0 и, следовательно, закон изменения
r0 и, следовательно, закон изменения
перемещения S толкателя с остриѐм.
41
Глава 4. СИЛЫ,ДЕЙСТВУЮЩИЕ В МЕХАНИЗМЕ
4.1Классификация сил
Вобщем случае, все силы, действующие в механизме, подразделяются на внешние задаваемые и внутренние реакции связей.
К задаваемым силам относятся силы движущие, полезного сопротивления, собственного веса звеньев, инерции и внутреннего сопротивления. Реакцию связи можно разложить на составляющие нормальную и касательную, представляющую собой силу трения.
Движущие силы и моменты.
Силы, приложенные к ведущим звеньям и направленные в сторону перемещения точек их приложения или составляющие с направляющей перемещений острые углы, называются движущими. В механизмах машин это усилие Рд, действующие на поршень (например, давление газов в двигателях внутреннего сгорания), или вращающий момент Мд (в электродвигателях - крутящий момент ротора, зависящий от скорости вращения последнего; в пружинных двигателях - момент, приложенный к заводному барабану, зависящий от угла поворота заводной оси).
В приборах измерительных и автоматического управления движущей силой является действие среды на чувствительный элемент-датчик (в приборах для измерения уровня давления, расхода и т.п.- это сила давления жидкости или газа)
Силы полезного сопротивления
В рабочих машинах эти силы появляются при непосредственном выполнении технологического процесса: при резании и штамповке металлов, подъѐме грузов и т.п. В точных механизмах силами полезного сопротивления являются противодействующие усилия и моменты, создаваемые упругими элементами приборов, отсчѐтных устройств и др. Следовательно, эти силы, приложенные к исполнительным и рабочим звеньям механизма направлены против перемещения точек их приложения или составляющие с направлением перемещений тупые углы (назначение механизма состоит в преодолении действия этих сил).
Силы инерции звеньев.
Эти силы обусловлены массой и движением звеньев с ускорением. Работа, совершаемая силами инерции, может быть положительной, отрицательной или равной нулю.
Силы вредного сопротивления.
К ним относятся силы трения, возникающие при относительном движении элементов кинематических пар, на преодоление которых
42
расходуется дополнительная работа, сверх той, которая необходима на преодоление сил полезного сопротивления.
Реакции.
Силы, возникающие в кинематических парах при работе механизма, называются реакциями, аксательные составляющие этих сил (силы трения) условно относят к задаваемым силам.
Силы веса звеньев.
Эти силы могут выполнять работу положительную, (центр масс звеньев опускается), отрицательную (центр масс звеньев поднимается). Работа сил веса равна нулю, если центр масс звеньев движется горизонтально. При циклическом движении работа этих сил за цикл равна нулю.
4.2. Силы инерци
Общий случай движения. |
|
|
|
|
|
Элементарная сила инерции |
dP и элемент тела, совершающего |
||||
|
|
|
|
|
|
плоскопараллельное движение, определяется уравнением |
dPu adm , |
||||
Где a - ускорение элементарной массы тела; dmэлементарная масса тела.
Следовательно, силы инерции звена распределяются по всему объѐму звена пропорционально массе и ускорению.
При определении усилий в кинематических парах и характера движения механизма оперируют статически эквивалентными системами, и распределѐнные силы приводятся к одной равнодействующей силе Pu , приложенной в центре масс звена, и к равнодействующей паре сил с моментом Mu :
|
|
|
|
|
|
|
(4.1) |
. |
Pu |
|
mas |
||||||
|
|
|
|
(4.2) . |
||||
|
Mu |
Js |
||||||
где m-масса всего звена, кг;
as- полное ускорение центра масс звена, м/с2 ; ε-угловое ускорение звена, 1/с2;
Js-момент инерции звена, относительно центра масс кг*м2.
Знак минус в формулах (4.1) и (4.2) показывает, что сила инерции Pu направлена в сторону, противоположную ускорению центра масс момент пары сил Mu - противоположно угловому ускорению звена .
Поступательно - вращающееся звено.
Все точки такого звена имеют одинаковые ускорения, равные ускорению центра масс as, а угловое ускорение  равно нулю.
равно нулю.
43

Следовательно, при поступательном движении звена действует только сила инерции Pu  mau , приложенная в центре масс.
mau , приложенная в центре масс.
Вращающееся звено.
Если звено совершает вращательное движение вокруг оси, проходящей через центр масс, то ускорение центра масс равно нулю (as=0) и сила инерции также равна нулю ( Pu 0 ). Если при этом звено вращается неравномерно  0 , то на звено будет действовать момент сил инерции, определяемый по формуле (4.2). При вращении звена с угловым ускорением
0 , то на звено будет действовать момент сил инерции, определяемый по формуле (4.2). При вращении звена с угловым ускорением  вокруг оси, не совпадающей с центром масс, на звено будет действовать сила Pu
вокруг оси, не совпадающей с центром масс, на звено будет действовать сила Pu  mas , приложенная в центре масс, и момент сил инерции Mu
mas , приложенная в центре масс, и момент сил инерции Mu  Js .
Js .
Заменяющие массы.В ряде случаев удобно массу звена условно заменить несколькими массами, сосредоточенными в заранее выбранных точках. Условия такой замены заключаются в эквивалентности сил инерции звена и заменяющей его фиктивной системы масс: сумма масс mi, расположенных в точках замещения, должна быть равна массе m звена; сумма статических моментов относительно центра масс должна быть равна нулю; сумма моментов инерции сосредоточенных масс относительно оси, проходящей через центр масс, должна быть равна моменту инерции звена Js.относительно этой же оси:
m1 m2 ... mk |
m |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.3) |
m1r1 |
m2r2 ... |
mkrk 0 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
m1 r1 |
m2 r2 ... |
mk rk |
Js |
|||||||||||
где r1, r2,..., rk - радиусывекторы замещающих точек.
Замена звена эквивалентной системой, удовлетворяющей всем условиям (4.3), называется динамическим замещением масс; если же выдержаны только первые два условия (4.3), то это статическое замещение масс. Последнее замещение упрощает задачу и даѐт осуществить замещение двумя массами, расположенными в центрах шарниров (рис.4.1):
mb m c |
и mc m b |
b c |
b c |
Рис. 4.1. Заменяющие массы |
Рис.4.2. Схема сил в |
|
поступательной паре |
44
4.3. Силы трения
Виды трения
Трение представляет собой явления сопротивления относительному перемещению, возникающее между двумя телами в зонах соприкосновения поверхностей по касательным к ним.
Различают трение скольжения и качения. Трение скольжения имеет место при относительном движении двух тел, скорости которых в точках касания различны. Трение качения возникает в высших кинематических, скорости которых в точках касания одинаковы по величине и направлению.
По состоянию поверхностного слоя и наличию смазки между элементами кинематических пар различают (ГОСТ 23ю002-78): трение без смазки, возникающее при отсутствии на поверхности трения, введѐнного смазочного материала всех видов; граничное трение - при наличии на поверхностях трения слоя жидкости, обладающего свойствами, отличающимися от объѐмных; жидкостное трение, при котором возникает явление сопротивления относительному перемещению между двумя телами, разделѐнными слоем жидкости, в котором проявляются еѐ объѐмные свойства.
На явление трения оказывают влияние свойства поверхностей. Из-за шероховатости и волнистости поверхностей, неточности изготовления деталей и изменения формы под действием приложенных нагрузок поверхности контактирует не по всей их площади, а по отдельным малым площадкам. Вследствие этого на соприкасающихся поверхностях даже при небольших сжимающих нагрузках возникают большие удельные давления. Под действием этих давлений происходят упругие и пластические деформации элементов поверхности, выступы поверхностей взаимно внедряются и на площадках контакта возникают силы молекулярного взаимодействия, что влияет на величину силы трения.
Сила трения.
Это сила сопротивления относительному перемещению двух тел при трении. Она приложена в зонах соприкосновения и направлена в сторону, противоположную возможному направлению относительной скорости. В результате работы силы трения происходи процесс постепенного изменения размеров элементов кинематических пар (отделение с поверхности трения материала и (или) его остаточная деформация). Этот процесс называется изнашиванием.
Коэффициент трения скольжения.
Между силой трения F и нормальной составляющей внешних сил N,действующей на поверхность тел 1 и 2 (рис.4.2.), существует зависимость,
45
которая с достаточной для практики точностью может быть представлена формулой Кулона:
F fN |
(4.5) |
где - коэффициент трения, определяемый опытным путѐм в зависимости от различных условий контакта звеньев. Рассмотрим трение при относительном движении двух звеньев: ползуна 1 и направляющей 2 (рис. 4.2.), прижат друг к другу силой Q. На основании экспериментов установлено, что для приведения в движение ползуна1, требуется сила, большая той, которая обеспечивает равномерное движение ползуна. В связи с этим различают предельную силу, соответствующую началу относительного движения, называемую силой трения покоя (при трогании с места) Fn, и силу сопротивления, возникающую во время движения, - силу трения движения F. Поэтому следует различать коэффициент трения покоя.
f = Fn/N |
(4.6) |
И коэффициент трения движения |
|
f=F/N |
(4.7) |
Чаще всего fn>f. |
|
Действие на ползун 1 сил N и F (рис.4.2) может быть заменено их равнодействующей R, и коэффициент трения равен тангенсу угла  между направлениями сил R и N, называемого углом трения:
между направлениями сил R и N, называемого углом трения:
f tg |
(4.8) |
Если к звену 1 приложить силу Q под углом  , то составляющая Q
, то составляющая Q Qsin , стремящаяся сдвинуть звено 1 относительно звена 2, окажется меньше предельной силы трения и поэтому движения не будет:
Qsin , стремящаяся сдвинуть звено 1 относительно звена 2, окажется меньше предельной силы трения и поэтому движения не будет:
|
Fn |
fnN tg nN |
tg nQcos |
Qsin |
Только при |
n |
наступает |
равенство, |
Q Fn и движение |
становится возможным. |
|
|
|
|
Коэффициент трения зависит от трѐх групп факторов:
а) Материала трущихся тел, вида смазки и плѐнки на поверхности;
б) Конструкции кинематической пары – размера поверхности, геометрического очертания;
в) режима работы-температуры, скорости, нагрузки.
Коэффициент трения можно считать постоянным, а силу трения прямо пропорциональной нормальному давлению только в определѐнном диапазоне скоростей и нагрузок. С увеличением скорости движения коэффициент трения в большинстве случаев уменьшается (до определѐнного предела); с возрастанием удельного давления и увеличением времени
46
предварительного контакта соприкасающихся тел коэффициент трения возрастает.
Величину силы трения можно определять по формуле (4.5) не только для плоской кинематической пары при сухом трении, но и для других видов кинематических пар при любых условиях смазки, если в расчѐтах использовать значения коэффициента трения f, полученные в условиях, соответствующих рассчитываемой пары. При этом для кинематических пар, у которых элементами являются поверхности со сложным очертанием, вместо коэффициента f применяют приведѐнный коэффициент трения f  , учитывающий конструктивные особенности кинематической пары:
, учитывающий конструктивные особенности кинематической пары:
f tg и F f N |
(4.9) |
Трение качения.
Сопротивление движению при качении обусловлено эффектом молекулярного сцепления на площадке катящегося контакта, несовершенной упругостью реальных материалов и трением при относительном проскальзывании поверхностей в пределах нагруженного контакта, обусловленным разницей в кривизне обкатываемых тел и упругими микро перемещениями в пределах контактной площадки.
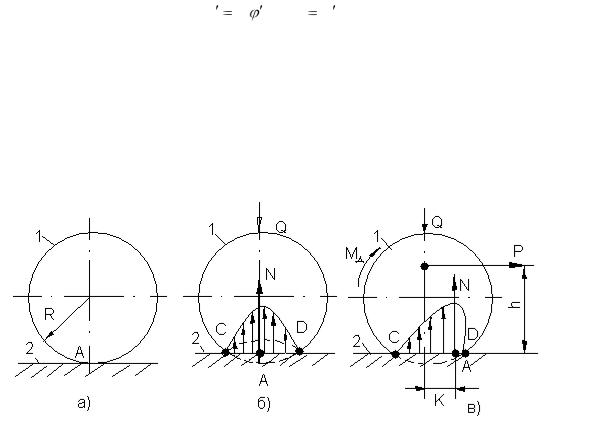
Рис. 4.3. Схема распределения сил, действующих на цилиндр:
а - без нагрузки; б) под нагрузкой в покое; в) под нагрузкой в движении.
В высшей кинематической паре, образованной звеньями 1 и 2 (рис.4.3,а) в статическом состоянии под нагрузкой Q возникает вследствие деформации площадки контакта CD, по которой действуют давления, распределѐнные по определѐнному закону (рис. 4ю3, б) При этом равнодействующая их N=Q проходит через точку A.
Опыты показывают, что для качения звена 1 к нему необходимо приложить движущий момент МД (рис.4.3,в). Это обусловлено тем, что при перекатывании звена 1 удельные давления перемещаются в направлении перекатывания на некоторое расстояние k вследствие чего возникает момент
47
сопротивления перекатывания M тр kN . При равномерном качении сумма моментов всех сил, действующих на звено 1, будет равна нулю:
M Д M тр M Д kN M Д kQ 0 F  f N
f N
Если звено 1 перекатывается под действием силы P, то в зоне касания катка с опорной плоскостью возникает сила трения скольжения Fn, направленная противоположно силе P,предельное значение которое (сила трения покоя) согласно формуле (4.6)
Fn fnN fnQ
В этом случае для равномерного качения необходимо соблюсти условия Мд=Ph=Qk и
P F |
f |
Q , |
т. е. |
Q |
k |
|
f |
Q , |
откуда f |
|
k |
. При чистом скольжении |
|||||||
|
|
n |
|
||||||||||||||||
n |
n |
|
|
|
|
h |
n |
|
|
|
|
|
h |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
необходимо P |
|
F |
f |
Q |
и М |
|
Ph |
|
Qk , откуда |
f |
|
k |
. Одновременное |
||||||
|
Д |
|
n |
|
|||||||||||||||
|
|
n |
n |
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
качение и скольжение возможно при |
fn |
|
h |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
k |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Коэффициент трения качения.
Как видно из формулы (4.10), сопротивление качения характеризуется коэффициент трения качения k, который имеет разновидность длины. Значение k определяют опытным путѐм: для пары сталь-сталь k=0.003…0.0005 см, для пары закалѐнная сталь - закалѐнная сталь k=0.001 см.
Потери на трение качения значительно меньше, чем на трение скольжения. Поэтому во многих механизмах, а особенно в приборах, где силы трения являются главными сопротивлениями, конструкции выполняются так, чтобы трение скольжения заменить трение качения.
48
Глава 5. СИНТЕЗ ЗУБЧАТЫХ МЕХАНИЗМОВ
5.1. Основная теорема и основной закон зацепления
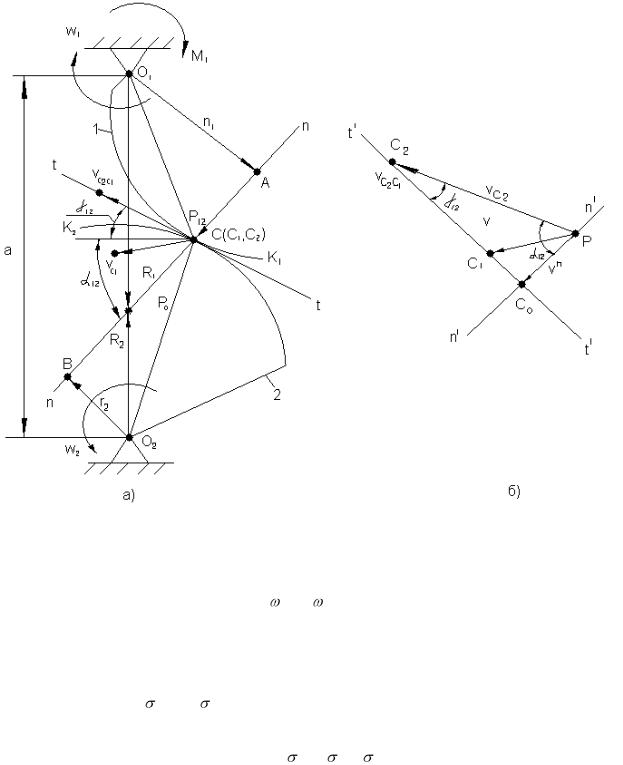
Рис. 5.1. К определению форм профиля двух взаимоогибаемых кривых: а - схема механизма с высшей парой; б – план скоростей.
Пусть передача |
вращения между двумя осями |
O1 и O2 (рис. 5.1,а) с |
угловыми скоростями |
1 и 2 осуществляется |
посредством двух |
взаимоогибаемых кривых K1 и K 2 , принадлежащих звеньям 1 и 2. Проведѐм в точке соприкосновения C кривых K1 и K 2 нормаль n – n и касательную t – t к этим кривым.
Скорости c1 и c 2 точек c1 и c2 принадлежащим звеньям 1 и 2, связаны условием
c 2  c1
c1  c 2c1
c 2c1
План скоростей механизма, построенный по этому уравнению, показан на рис. 5.1,б
49
Из точек O1 |
и O2 |
(рис.5.1,а) опускаем на нормаль n-n перпендикуляры |
||||||||||||||||||||||||||||||||||||||||||||||||||
O1 A и O2 B , а из полюса |
плана скоростей (рис. 5.1,б)- перпендикуляр |
PC0 на |
||||||||||||||||||||||||||||||||||||||||||||||||||
направлении t1 |
t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отрезок ( PC0 ) |
представляет собой нормальную составляющую |
n |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
векторов скоростей |
c1 |
и |
c 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из подобия |
|
O1 AC1 и PC0C1 |
и O2 BC2 |
и PC0 C2 |
имеем |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
pc0 |
|
|
|
|
O1 A |
|
и |
|
|
|
pc0 |
|
|
|
|
|
|
O2 B |
|
|
|
|
|
(5.1) |
||||||||||||||||||||||
|
|
|
|
|
|
pc1 |
|
O1C1 |
|
|
|
pc2 |
|
|
|
|
|
|
o2C2 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Отрезки ( pc1 ),( pc2 ), ( pc0 ) представляют собой соответственно |
||||||||||||||||||||||||||||||||||||||||||||||||||||
скорости c1 , |
c 2 и |
n . Тогда соотношения (9.1) могут быть представлены |
||||||||||||||||||||||||||||||||||||||||||||||||||
так: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
O1 A |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
O2 B |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
c1 |
|
|
|
|
O1C1 |
|
|
|
c2 |
|
|
|
|
|
O2C2 |
|
|
|
|
||||||||||||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1 A |
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
O2 B |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
||||||||||||
|
|
|
|
|
|
n |
|
|
|
c1 |
|
O1C1 |
|
|
n |
|
|
|
|
|
|
c 2 |
O2C2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Заменяя |
c1 |
и |
c 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 (O1 A) и |
|
2 (O2 B) , |
|||||||||||||||
их значениями, равными |
|
|
|
c1 |
|
n |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 (O1 A) |
|
|
|
|
|
|
2 (O2 B) |
|
|
|
|
|
|
|
(5.2) |
|||||||||||||||||||||||||
Следовательно, передаточная функция U12 |
равна |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
U12 |
|
|
|
1 |
|
|
|
|
|
|
O2 B |
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
(5.3) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
O1 A |
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Продолжим нормаль n-n до пересечения в точке P0 c отрезком (O1O2 ) . |
||||||||||||||||||||||||||||||||||||||||||||||||||||
Тогда из подобия |
O1 AP0 |
и O2 BP0 |
имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
O2 B |
|
|
|
|
|
r2 |
|
|
O2 P0 |
|
, |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O A |
|
|
|
|
r |
|
O P |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
||||||||||
и формула (5.3) принимает окончательный вид: |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
U12 |
|
1 |
|
|
|
|
|
|
|
O2 P0 |
|
|
|
|
R2 |
|
|
|
|
|
|
(5.4) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
O1 P0 |
|
|
|
R1 |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Равенство (5.4) называется основной теоремой зацепления.
Нормаль в точке соприкосновения элементов высшей пары качения и скольжения делит линию центров на части. Обратно пропорциональные угловым скоростям.
Точка P0 , делящая линию центров O1O2 на части. Обратно
пропорционально угловым скоростям, является мгновенным центром вращения в относительном движении звеньев 1 и 2.
50