

3143
.pdf1.5. Образование плоских механизмов по Ассуру
Принципы классификации. Для удобства изучения механизмов и разработки общих методов проектирования и расчета механизмы целесообразно классифицировать. Могут быть использованы разные признаки классификации: характер движения - плоские и пространственные; вид кинематических пар - механизмы с низшими и высшими парами; назначение - механизмы приборов для контроля давлений, температуры, уровня и т.д.; принцип передачи усилий - механизмы трения и зацепления; конструктивные признаки - шарнирно-рычажные, кулачковые, фрикционные, зубчатые, червячные и т.д. В зависимости от задач, поставленных перед исследователем, пользуются той или иной классификацией, лучше всего удовлетворяющей решению этих задач.
Структурная классификация. Одной из распространенных классификаций плоских шарнирных механизмов с парами пятого класса является структурная классификация, предложенная И.И. Артоболевским на основании идей Л.В. Ассура. Согласно этой классификации механизмы объединяются в классы от первого и выше по структурным признакам. Механизм первого класса состоит из ведущего звена и стойки, соединенных кинематической парой пятого класса; механизмы более высоких классов образуются последовательным присоединением к механизму первого класса кинематических цепей, не изменяющих степени подвижности этого исходного механизма, т.е. имеющих степень подвижности, равную нулю.
Группа. Кинематическая цепь, которая, будучи присоединенной свободными элементами пар (внешние пары) к стойке, обладает нулевой степенью подвижности, называется группой.
Полагая, что в состав группы входят только пары пятого класса (пары четвертого класса можно условно заменить цепями с парами пятого класса), для группы, как частного случая цепи, получаем условие W = 3n - 2p5 = 0, откуда:
р5 = |
3 |
n |
(1.4) |
2 |
Таким образом, группа может состоять из двух подвижных звеньев и трех кинематических пар пятого класса (рис. 1.5, а), четырех подвижных звеньев и шести пар пятого класса (рис. 1.5, г, д) и т.д.
11

а) |
б) |
в) |
г) |
д) |
Рис. 1.5. Контуры различных классов
Контур и вид группы. Группы делятся на классы в зависимости от класса контура. Контуром называют замкнутую часть плоскости, занятую звеном или ограниченную со всех сторон звеньями. Класс контура определяется числом кинематических пар, входящих в этот контур. Контур, изображенный на рис. 1.5, б - второго класса (эквивалентное изображение дано на рис. 1.5, в). На рис. 1.5, д изображена группа, в состав которой входят три контура: АВС - контур третьего класса, BDFC - контур четвертого класса, DEF - контур третьего класса.
Класс группы определяется наивысшим классом контура, входящего в ее состав. Группа второго класса представлена на рис. 1.5, а, группы третьего и четвертого классов - на рис. 1.5, г и 5, д соответственно.
Наиболее распространенными являются группы второго класса, которые разделяют на пять видов. Вид группы второго класса определяется в
12
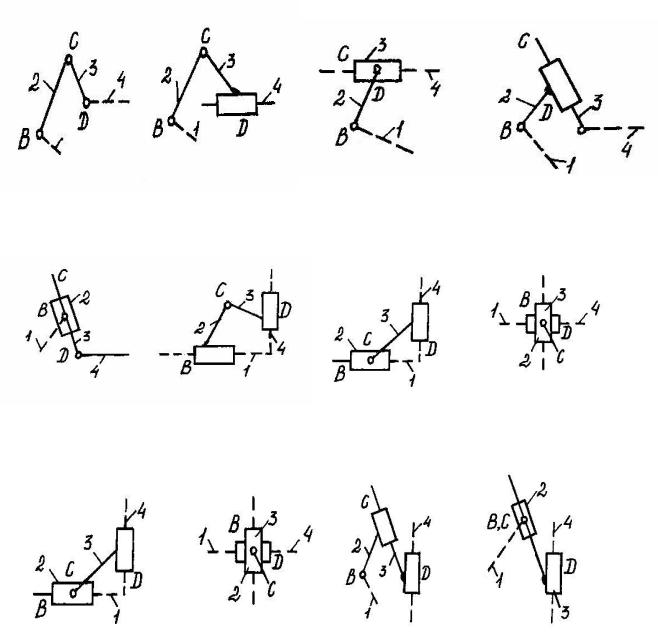
зависимости от числа и относительного расположения поступательных и вращательных кинематических пар в ней (рис. 1.6, а - д).
а) первого |
б) второго |
вида |
вида |
в) третьего |
г) четвѐртого |
вида |
вида |
г) четвертого |
д) пятого |
вида |
вида |
Рис. 1.6. Группы второго вида |
|
Класс механизма. По наивысшему классу группы, входящей в состав данного механизма, определяется его класс. Для определения класса механизма необходимо выделить в нем группы, начиная с наиболее удаленных от ведущего звена, в результате чего остается механизм первого класса. Выделив группу, одновременно проверяют степень подвижности W оставшейся части механизма.
13

Этот процесс исследования называется структурным анализом механизма. Порядок проведения структурного анализа: а) определяется количество подвижных звеньев и кинематических пар; б) устанавливается наличие пассивных связей и лишних степеней свободы, соответствующие звенья, вносящие их, исключаются; в) производится замена высших кинематических пар цепями с низшими парами; г) выделяются группы и устанавливается их класс и вид; д) определяется класс механизма.
Пример: Провести структурный анализ механизма привода конвейера
(рис. 1.7, а).
а)
б) |
в) |
г) |
Рис. 1.7. Структурный анализ привода конвейера
Механизм конвейера состоит из пяти подвижных звеньев (n = 5) и семи кинематических пар пятого класса (р5 = 7); пары четвертого класса отсутствуют (р4 = 0). Степень подвижности цепи по формуле W = 3n - р5 - р4 = 3 2 - 2 7 - 0 = 1, следовательно, эта цепь будет механизмом при заданном законе движения одного звена (звено 1). В механизме пассивных связей и лишних степеней свободы нет.
Переходим к выделению структурных групп, начиная со звеньев, наиболее удаленных от ведущего звена (рис. 1.7, б). Выделенные группы и
14
порядок их выделения представлены на рис. 1.7, в, г. Каждая группа состоит из двух звеньев и трех кинематических пар пятого класса и поэтому является группой второго класса; первая группа (рис. 1.7, в) - второго вида (одна крайняя пара поступательная); вторая группа (рис. 1.7, г) - первого вида (все пары вращательные). Следовательно, механизм привода конвейера - второго класса, т.к. наивысший класс группы, входящей в состав этого механизма, второй.
15

Глава 2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ С НИЗШИМИ ПАРАМИ
2.1. Определение положений и перемещений звеньев
Графический метод. Положение звеньев и траекторий точек определяется на кинематической схеме механизма.
Схема механизма, на которой зафиксировано определенное положение ведущего звена и в связи с ним положения всех остальных звеньев, называется планом положения механизма. При вычерчивании схемы механизма необходимо выбирать масштабы, соответствующие ГОСТу. Так как в дальнейшем при кинематических расчетах используются величины, производные от длины, то масштаб плана механизма должен иметь размерность (м/мм). Рекомендуемые масштабы: 0,0001; 0,0002; (0,00025); 0,0005; 0,001; 0,002; (0,0025); 0,005; 0,01; 0,02 и т.д.
При вычерчивании плана положений механизма прежде всего нужно нанести положения неподвижных центров вращательных пар и направляющих поступательных пар. Затем, для выбранного положения ведущего звена последовательно определяются положения кинематических пар и звеньев групп, присоединенных к ведущему звену.
Способ засечек. Определение положений перемещающихся кинематических пар осуществляется с помощью засечек. В этом случае строится геометрическое место возможных положений центров вращательных пар (рис. 2.1, а). Из центров крайних кинематических пар (B и D) ближайшей к ведущему звену группы с помощью циркуля проводят дуги радиусами, равными BC и DC, пересечение которых определит положение центра внутренней вращательной пары С. Соединив полученную точку С прямыми линиями с точками В и D, находят положения звеньев BC и CD. Таким же образом определяются положения центров остальных кинематических пар.
Если необходимо проследить движение определенной точки на каком-либо звене, следует отметить эту точку на каждом зафиксированном положении звена. Соединяя плавной кривой отмеченной точки, получают траекторию движения.
Метод графиков. Для представления о характере перемещений ведомого звена (рис. 2.1, а) пользуются графиками. На оси абсцисс графика (рис. 2.1, б) в масштабе t (с/мм) откладывают время одного цикла (в период установившегося движения - это время, по истечении которого положение, скорость и ускорение звеньев механизма приобретают первоначальные значения). При выбранной длине отрезка на оси абсцисс соответствующего времени одного цикла, и скорости ведущего звена , масштаб
16

а)
б)
Рис. 2.1. К построению графика перемещений
2
t
1
По оси ординат откладывают линейное перемещение Sc звена в масштабе
(2.1)
ведомого
S (м/мм) или угловое перемещение в масштабе  (рад/мм) для
(рад/мм) для
механизмов с вращающимся ведомым звеном.
В качестве начала отсчета удобно выбрать одно из крайних положений ведомого звена; при этом кривая Sc = Sc(t), представляющая перемещение ведомого звена от этого крайнего положения, будет располагаться по одну сторону от оси абсцисс. Точность графического метода определения перемещений невысока.
Аналитический метод.
17

Рис. 2.2. К определению перемещения ползуна кривошипноползунного механизма
Втех случаях, когда необходимо получить высокую точность, применяют аналитические методы. Решения задачи аналитическим методом
вобщем случае сложны, т.к. зачастую приводят к громоздким вычислениям. Наиболее удобный способ для аналитического метода - это составление условия замкнутости всех закрытых контуров механизма, рассматриваемых как векторные многоугольники.
Исходными данными для реализации этого метода служат кинематическая схема, представленная в прямоугольной системе координат, линейные размеры всех звеньев и аналитическая зависимость изменения обобщенной координаты, определяющей положение ведущего звена.
Вкачестве примера рассмотрим кривошипно-ползунный механизм. Кинематическая схема механизма (рис. 2.2) представляет собой замкнутый векторный треугольник, уравнение замкнутости которого:
|
|
|
|
|
(2.2) |
1 |
2 |
0 0 |
|||
Это условие можно также представить уравнениями проекций векторов на оси системы координат xAy (начало системы координат находится на оси вращения А) в виде:
cos |
1 |
2 cos |
2 |
0 |
} |
(2.3) |
1 sin |
1 |
2 sin |
2 |
0 |
где 1, 2 - углы, образованные звеньями 1 и 2 с осью Ах (рис. 2.2); 1,2 - длины звеньев 1 и 2; 1 = хс - отстояние звена 3.
В этих уравнениях знаки при слагаемых определяются знаками тригонометрических функций.
18
|
В уравнениях (2.3) 1 и 2 |
и угол поворота ведущего звена |
1 |
||||||||||
известны, подлежат определению величины |
2 и хс. |
|
|
||||||||||
|
Используя геометрические соотношения замкнутой цепи АВС и |
||||||||||||
записав значение: |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
sin 2 = - sin |
= - |
1 |
sin 1 |
(2.4) |
|||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|||
где |
1 |
|
|
2 |
|
- теорема синусов. |
|
|
|
|
|
|
|
sin |
sin |
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
Можно получить положение ведомого звена в зависимости от угла |
1 |
||||||||||||
поворота кривошипа в виде хс = 1cos 1 |
+ 2cos arcsin ( |
1 |
sin |
1) , а обозначив |
|||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1  , получим:
, получим:
2
хс = 1cos |
1 + 2 |
1 2 sin2 |
1 |
(2.5) |
|
|
|
|
2.2. Определение скоростей и ускорений звеньев
Скорости и ускорения ведомых звеньев механизма могут быть определены методами планов, кинематических диаграмм и аналитическими. Во всех случаях в качестве исходных данных должны быть известны: схема механизма при определенном положении ведущего звена, его скорость и ускорение.
Метод планов. Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для всех групп, входящих в механизм, начиная с ведущего звена.
Для определения полной картины скоростей любого звена, входящего в группу, достаточно знать линейные скорости двух точек этого звена или линейную скорость одной точки и угловую скорость звена. Так как скорости конечных элементов звеньев групп известны, то необходимо выбрать общую для двух звеньев точку и записать два уравнения для определения скорости этой точки.
Для групп первого, второго и четвертого видов (рис. 2.3, а, б, г) это постоянная точка - центр средней вращательной пары группы, для других - мгновенная точка на одном звене, совпадающая в данный момент с центром конечной вращательной пары другого звена.
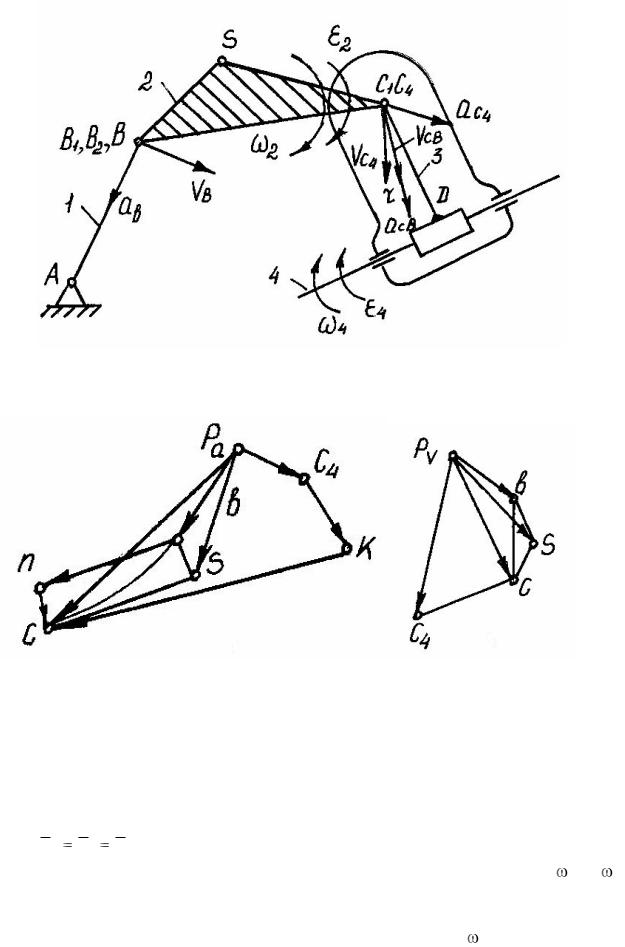
При составлении векторных уравнений следует четко установить точки, скорости которых используются как скорости в переносном движении. Если звенья группы образуют поступательные кинематические, то необходимо использовать точки, принадлежащие направляющим звеньям. В качестве примера рассмотрим построение планов скоростей и ускорений группы второго класса второго вида.
19
а)
б) в)
Рис. 2.3. Кинематическое исследование группы второго класса второго вида
План скоростей. В этой группе (рис. 2.3, а) полагаем, что скорости примыкающих звеньев 1 и 4 заданы. Следовательно, скорость точки В2, принадлежащей звену 2, равна скорости точки В1, принадлежащей звену 1, т.е. VB2 VB1 VB . Угловая скорость звена 3, образующего поступательную
пару со звеном 4, равна заданной угловой скорости звена 4, т.е. 3 = 4. Следовательно, для отыскания скоростей второго звена достаточно определить, кроме известной скорости точки В, скорость еще одной точки, а для третьего звена, кроме известной угловой скорости 3, также скорость какой-либо одной точки. Для решения этой задачи следует рассмотреть
20