

Основы инженерного проектирования. Кирпичев Ю.В., Кирпичев И.Ю
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Воронежский государственный технический университет
Ю.В. Кирпичев И.Ю. Кирпичев Ю.Б. Рукин Р.А. Жилин
ОСНОВЫ ИНЖЕНЕРНОГО ПРОЕКТИРОВАНИЯ
Часть 2
Утверждено редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2003
УДК 621.753.001
Основы инженерного проектирования: Учеб. пособие. Ч. 2 / Ю.В. Кирпичев, И.Ю. Кирпичев, Ю.Б. Рукин, Р.А. Жилин. Воронеж: Воронеж. гос. техн. ун-т, 2003. 85 с.
Учебное пособие содержит основные материалы по классификации механизмов, анализу механизмов с высшими и низшими кинематическими парами. Приведены основы расчета на прочность. Рассмотрены различные случаи расчета напряженного состояния бруса и балок. Приведены рекомендации по выявлению опасных сечений для балок, валов и способы проверки их на усталость и прочность при различных циклах нагружения. Даны рекомендации по выбору факторов, определяющих в целом работоспособность механизмов и их деталей.
Учебное пособие предназначено для студентов специальностей 070200 “Физика и техника низких температур” при изучении дисциплины “Основы инженерного проектирования”.
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD и содержится в файле “ОИП-2.doc”.
Табл.1. Ил.50. Библиогр.: 7 назв.
Научный редактор канд. техн. наук, проф. В.А. Нилов
Рецензенты кафедра “Транспортные машины” Воронежской государственной архитектурно-строительной академии; д-р техн. наук, проф. Ю.В.Устинов д-р техн. наук, проф. Д.В. Хван
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
© Кирпичев Ю.В., Кирпичев И.Ю., Рукин Ю.Б., Жилин Р.А., 2003
© Оформление. Воронежский государственный технический университет, 2003
2
Оглавление
|
стр. |
Глава 1. Структура и классификация механизмов |
|
1.1. Основные понятия теории механизмов и машин |
4 |
1.2. Классификация кинематических пар по числу степени свободы и числу |
|
условий связи |
6 |
1.3. Избыточные связи и лишние степени свободы в механизме |
7 |
1.4. Замена в плоских механизмах высших кинематических пар цепями |
|
с низшими парами |
8 |
1.5. Образование плоских механизмов по Ассуру |
9 |
Глава 2. Кинематический анализ механизмов с низшими звеньями |
|
2.1. Определение положения и перемещения звеньев |
13 |
2.2. Определение скорости и ускорения звеньев |
15 |
Глава 3. Кинематический анализ механизмов с высшими парами |
|
3.1. Соотношение скоростей высшей кинематической пары |
22 |
3.2. Механизм постоянным передаточным отношением |
25 |
Глава 4. Основы расчетов на прочность |
|
4.1. Введение |
30 |
4.2. Центральное растяжение (сжатие) прямого бруса |
33 |
4.3. Механизм характеристики и испытаний материалов |
38 |
Глава 5. Изгиб |
|
5.1. Типы брусьев и опор |
41 |
5.2. Эпюры поперечных сил и изгибающих моментов |
42 |
5.3. Основы дифференциальной зависимости при изгибе |
47 |
5.4. Нормальное напряжение при чистом изгибе |
48 |
Глава 6. Прочность при переменных напряжениях |
|
6.1. Усталость металла |
53 |
6.2. Методы определения предела выносливости |
56 |
6.3. Концентрация напряжений |
61 |
6.4. Факторы, влияющие на прочность переменных напряжений |
63 |
6.5. Расчет на прочность при переменных напряжениях |
65 |
Глава 7. Требования, предъявляемые к механизму |
|
7.1. Факторы, определяющие работоспособность механизмов и их деталей |
69 |
7.2. Материалы |
70 |
7.3. Точность изготовления деталей механизмов и приборов |
72 |
Библиографический список |
84 |
3
Глава 1. СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
1.1. Основные понятия теории механизмов и машин (машина, механизм, звено, кинематическая пара, высшие и низшие пары)
Машина состоит из трех основных частей - двигателя, передаточного механизма и исполнительного органа. Передаточный механизм служит для преобразования вида движения, изменения величины и направления скорости исполнительного органа. Передаточные механизмы машин и приборов имеют одинаковые для всех механизмов или определенных групп признаки, что дает возможность разработать общие методы их исследования и проектирования. С точки зрения кинематики безразлично, исследуется ли механизм двигателя внутреннего сгорания или отсчетного устройства манометрического прибора, если у них одинаковые кинематические схемы. Несмотря на различное назначение этих двух объектов и полную несхожесть их внешнего вида, в основе лежит один и тот же кривошипно-ползунный механизм. Методы кинематического исследования этих механизмов одинаковы.
Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено-стойку (станина, корпус, шасси и т.д.) и подвижные звенья, которые могут совершать вращательное, поступательное и сложное движение. Звеном может быть одна или несколько жестко связанных между собой деталей.
а)
б)
4
в)
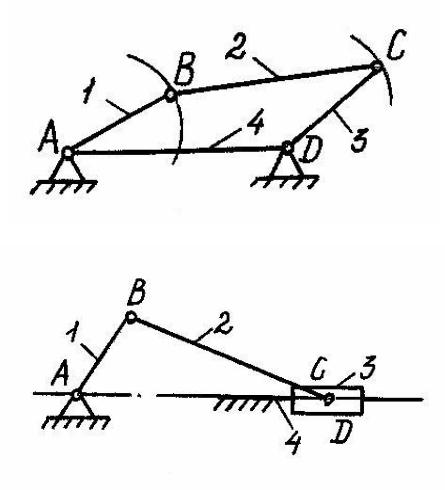
Рис. 1.1. Механизм шарнирного четырехзвенника а) - четырехзвенник; б) - кривошипный механизм; в) - кулисный механизм
В зависимости от характера движения и назначения звенья имеют определенные названия. На рис. 1.1: звено1 - кривошип; звено 2, совершаются сложное плоско-параллельное движение - шатуном; звено 3, совершающее качательное движение - коромыслом; неподвижное звено 4 является стойкой.
Кулисные механизмы, в состав которых входят два ползуна, образуют тангенсные и синусные механизмы (рис. 1.2)
а) |
б) |
Рис. 1.2. Тангенсный (а) и синусный (б) механизмы
Широкое применение в технике нашли также кулачковые механизмы, отличающиеся большим разнообразием кулачков, фрикционные и зубчатые механизмы.
5
Механизм является кинематической цепью, отличающейся определенностью движения всех звеньев относительно неподвижного звена - стойки. Звенья, на которые действуют движущие силы, называются ведущими, остальные - ведомыми. Следовательно, механизмом называется кинематическая цепь, у которой при заданном движении одного или нескольких звеньев относительно звена, принятого за стойку, остальные звенья совершают вполне определенные движения.
При кинематическом исследовании механизмов иногда удобнее движение задавать не ведущим звеньям, на которые действуют движущие силы, а другим. В этом случае такие звенья называются входными; последнее звено в кинематической цепи, движение которого является производным от положения входного звена, называется выходным.
Соединение двух звеньев, обеспечивающее определенное относительное движение, образует кинематическую пару. Элементами кинематической пары называются поверхности, линии или точки, по которым происходит подвижное соединение двух звеньев и которые ограничивают относительное движение этих звеньев. В зависимости от вида элементов различают высшие и низшие кинематические пары. В высших кинематических парах элементами являются линии или точки. Кинематические пары, образованные элементами в виде поверхностей, называются низшими. Замыкание кинематических пар может быть геометрическим и силовым (пружина).
1.2.Классификация кинематических пар по числу степеней свободы
ичислу условий связи
Класс пары. Свободное звено в пространстве обладает шестью степенями свободы. Звено, входящее в кинематическую пару, теряет от одной до пяти степеней свободы. Класс кинематической пары определяется числом условий связи S, налагаемых на относительное движение звеньев. Различают пять классов кинематических пар. Если Н - число степеней свободы звеньев кинематической пары, то:
S = 6 - H |
(1.1) |
Например, в парах конструкции элементов позволяют осуществлять два независимых движения. Для них Н = 2 и S = 4, следовательно, эта пара - четвертого класса. Если одно вращательное движение Н = 1 и S = 5 - пара пятого класса.
Можно подобрать такую форму элементов пары, чтобы при одном независимом движении возникло второе - производное: в винтовой паре вращательное движение винта вызывает поступательное перемещение его вдоль оси. Такую пару следует отнести к пятому классу, т.к. имеется всего одно независимое движение (Н = 1).
Степень подвижности. Количество ведущих звеньев соответствует степени подвижности механизма W, т.е. степени свободы его относительно стойки. Если число подвижных звеньев плоского механизма n, число кинематических пар пятого класса - Р5, четвертого класса - Р4, то число возможных движений несоединенных в пары звеньев будет 3n, число условий связи, налагаемых парами пятого класса - 2Р5, парами четвертого класса - Р4 и, следовательно, степень
подвижности механизма: |
|
W = 3n - 2p5 - p4 - формула Чебышева |
(1.2) |
Когда рассматривают подвижность пространственного механизма, пользуются формулой Сомова-Малышева:
6
W = 6n - 5p5 - 4p4 - 3p3 - 2p2 - p1 , |
(1.3) |
где р1, р2, р3 - число пар первого, второго, третьего классов.
1.3.Избыточные связи и лишние степени свободы в механизме
Вформуле Чебышева не отражены размеры звеньев. Специальным подбором размеров некоторых звеньев можно получить фактическую степень подвижности, отличающуюся от подсчитываемой по формуле (1.2).
а) |
б) |
в) |
г) |
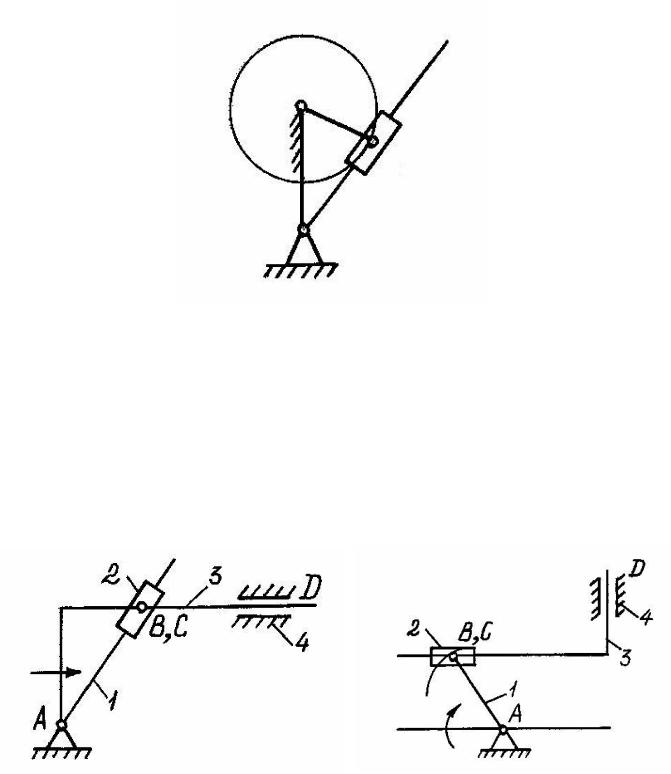
Рис. 1.3. Шарнирные и кулачковые механизмы
7
Например, в механизме, показанном на рис. 3, а, при наличии звена EF степень подвижности W = 3n - 2p5 - p4 = 3 4 - 2 6 - 0 = 0, но если принять дополнительное условие, касающееся размеров звеньев, а именно AB =º CD =ºEF (рис. 1.3, б) то, несмотря на то, что по подсчету по прежнему W = 0, фактически степень подвижности W = 1 и механизм будет работать. При этих условиях звено EF можно исключить и степень подвижности не изменится. Такие звенья, наличие которых не влияет на подвижность механизма, налагают пассивные или избыточные условия связи и называются пассивными. В механизмы они вводятся для увеличения жесткости, лучшего распределения нагрузки, создания определенности направления движения и т.д. Введение пассивных звеньев требует высокой точности выполнения элементов кинематических пар.
В механизме на рис. 3, в, W = 3n - 2p5 - p4 = 3 3 - 2 3 - 1 = 2. Вторую подвижность вносит звено 3 - некруглый ролик. Если ролик сделать круглым (рис. 1.3, г), то характер относительного движения коромысла 2 будет таким же, как и в том случае, если ролик сделать неподвижным. В этом смысле степень свободы, вносимая роликом, является "лишней". При закрепленном ролике
n = 2, p5 = 2, p4 = 1 и W = 3 2 - 2 2 - 1 = 1.
Чаще всего звенья, создающие лишние степени свободы, вводят в механизм для улучшения условий работы, повышения КПД (замена скольжения качением) и т.д. При структурном анализе пассивные звенья и лишние степени свободы условно исключают.
1.4.Замена в плоских механизмах высших кинематических пар цепями с низшими парами
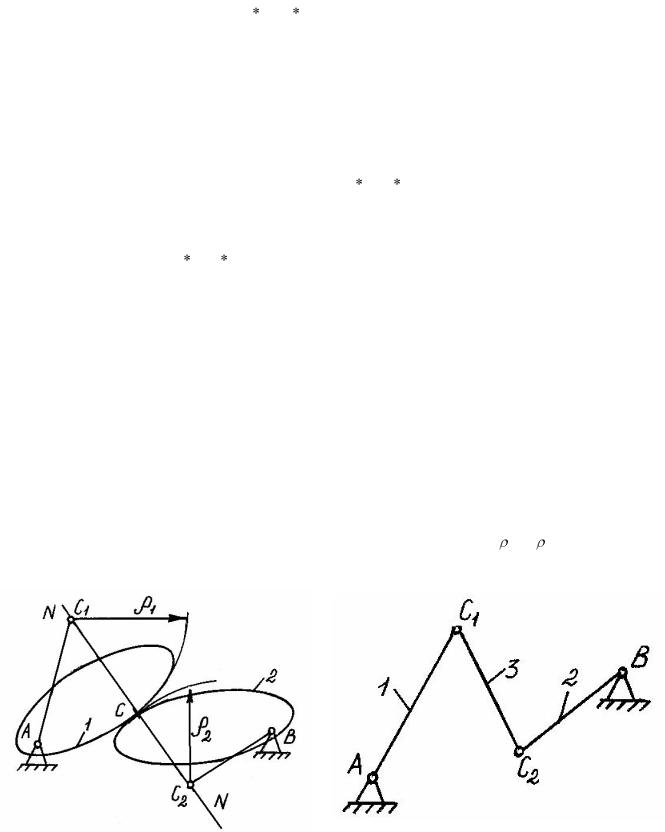
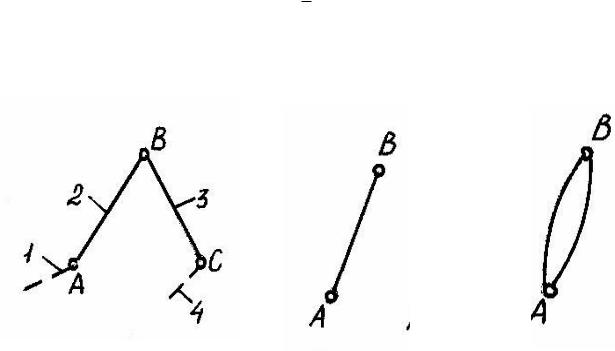
Распространенные методы изучения структуры механизмов разработаны для механизмов, в состав которых входят только низшие пары, поэтому при структурном анализе высшие пары (пары четвертого класса) условно заменяют кинематическими цепями, содержащими лишь пары пятого класса. Заменяющие цепи, естественно, должны быть структурно и кинематически эквивалентны заменяемым парам. Простейшая заменяющая цепь (рис. 1.4) будет состоять из одного звена 3, расположенного по нормали NN к профилям звеньев 1 и 2, образующих высшую кинематическую пару С. Длина звена 3 равна сумме радиусов кривизны 1 и 2.
Это звено образует пары пятого класса С1 и С2 со звеньями 1 и 2.
а) |
б) |
|
Рис. 1.4. Замена высшей пары на цепь с низшими |
|
8 |
1.5. Образование плоских механизмов по Ассуру
Принципы классификации. Для удобства изучения механизмов и разработки общих методов проектирования и расчета механизмы целесообразно классифицировать. Могут быть использованы разные признаки классификации: характер движения - плоские и пространственные; вид кинематических пар - механизмы с низшими и высшими парами; назначение - механизмы приборов для контроля давлений, температуры, уровня и т.д.; принцип передачи усилий - механизмы трения и зацепления; конструктивные признаки - шарнирнорычажные, кулачковые, фрикционные, зубчатые, червячные и т.д. В зависимости от задач, поставленных перед исследователем, пользуются той или иной классификацией, лучше всего удовлетворяющей решению этих задач.
Структурная классификация. Одной из распространенных классификаций плоских шарнирных механизмов с парами пятого класса является структурная классификация, предложенная И.И. Артоболевским на основании идей Л.В. Ассура. Согласно этой классификации механизмы объединяются в классы от первого и выше по структурным признакам. Механизм первого класса состоит из ведущего звена и стойки, соединенных кинематической парой пятого класса; механизмы более высоких классов образуются последовательным присоединением к механизму первого класса кинематических цепей, не изменяющих степени подвижности этого исходного механизма, т.е. имеющих степень подвижности, равную нулю.
Группа. Кинематическая цепь, которая, будучи присоединенной свободными элементами пар (внешние пары) к стойке, обладает нулевой степенью подвижности, называется группой.
Полагая, что в состав группы входят только пары пятого класса (пары четвертого класса можно условно заменить цепями с парами пятого класса), для группы, как частного случая цепи, получаем условие W = 3n - 2p5 = 0, откуда:
р5 = |
3 |
n |
(1.4) |
2 |
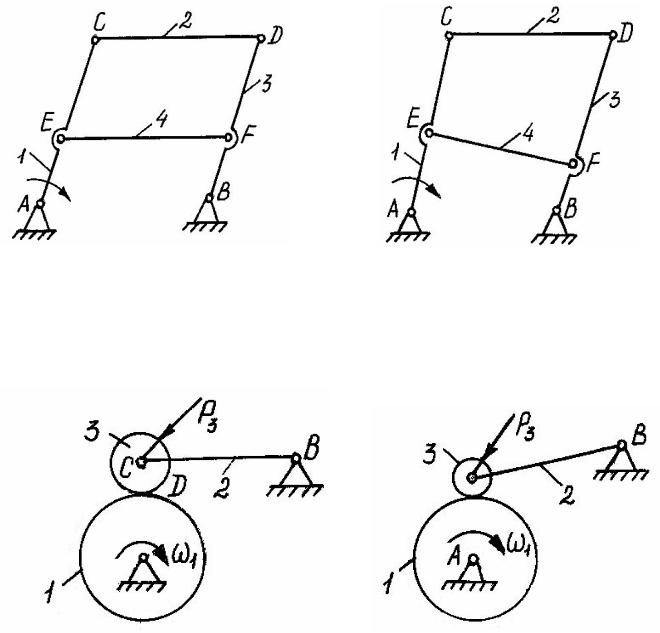
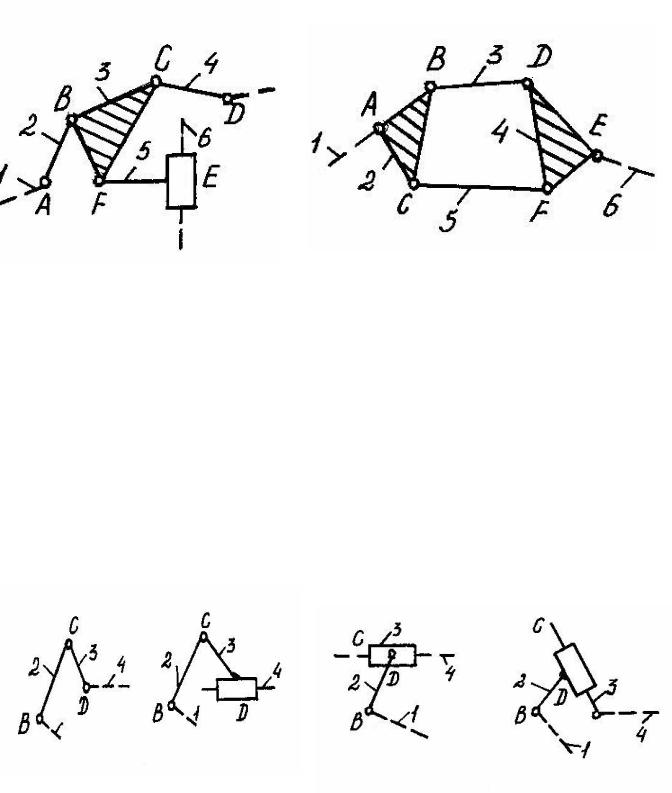
Таким образом, группа может состоять из двух подвижных звеньев и трех кинематических пар пятого класса (рис. 5, а), четырех подвижных звеньев и шести пар пятого класса (рис. 5, г, д) и т.д.
а) |
б) |
в) |
9
г) |
д) |
Рис. 1.5. Контуры различных классов
Контур и вид группы. Группы делятся на классы в зависимости от класса контура. Контуром называют замкнутую часть плоскости, занятую звеном или ограниченную со всех сторон звеньями. Класс контура определяется числом кинематических пар, входящих в этот контур. Контур, изображенный на рис. 1.5, б - второго класса (эквивалентное изображение дано на рис. 1.5, в). На рис. 1.5, д изображена группа, в состав которой входят три контура: АВС - контур третьего класса, BDFC - контур четвертого класса, DEF - контур третьего класса.
Класс группы определяется наивысшим классом контура, входящего в ее состав. Группа второго класса представлена на рис. 1.5, а, группы третьего и четвертого классов - на рис. 1.5, г и 5, д соответственно.
Наиболее распространенными являются группы второго класса, которые разделяют на пять видов. Вид группы второго класса определяется в зависимости от числа и относительного расположения поступательных и вращательных кинематических пар в ней (рис. 1.6, а - д).
а) первого |
б) второго |
вида |
вида |
|
10 |