

1736
.pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Воронежский государственный архитектурно-строительный университет»
Г.Н. Мартыненко, А.В. Исанова, В.И. Лукьяненко
Основы автоматизации тепловых процессов
Учебное пособие
для студентов бакалавриата 1-го, 2-го курса и дипломников направления 140100 «Теплоэнергетика и теплотехника»
Воронеж 2015
УДК 621.643-036.742 ББК 32.965:31.38я73
М294
Рецензенты:
кафедра «Теоретическая и промышленная теплоэнергетика» Воронежского государственного технического университета; И.А. Стельмахов, директор ООО «Регион Проект»
Мартыненко, Г.Н.
М294 Основы автоматизации тепловых процессов : учеб. посо-
бие / Г.Н. Мартыненко, А.В. Исанова, В.И. Лукьяненко; Воронежский ГАСУ. - Воронеж, 2015. – 70 c.
В пособии приводятся основные понятия теории автоматического регулирования, приведены принципиальные схемы регуляторов прямого и косвенного действия. Описаны основные законы регулирования и охарактеризованы основные применяемые в тепловом хозяйстве системы автоматического регулирования. Описаны структурные и функциональные схемы автоматического регулирования в котельных, тепловых сетях, системах газо- и мазутоснабжения.
Предназначено для студентов бакалавриата 1-го, 2-го курса и дипломников направления 140100 «Теплоэнергетика и теплотехника».
Ил. 60. Табл. 1. Библиогр.: 4 назв.
УДК 621.643-036.742 ББК 32.965:31.38я73
Печатается по решению учебно-методического совета Воронежского ГАСУ
ISBN 978-5-89040-521-0 |
© Мартыненко Г.Н., Исанова А.В., |
|
Лукьяненко В.И., 2015 |
|
© Воронежский ГАСУ, 2015 |
2
ВВЕДЕНИЕ
Вдисциплинах «Автоматизация тепловых процессов», «Метрология, сертификация, технические измерения и автоматизация тепловых процессов» и т.д. предусматривается изучение основ теории автоматического регулирования тепловых процессов, принцип действия и конструкция средств автоматизации, их применение для автоматизации тепловых процессов.
Врезультате студенты должны усвоить:
основы теории автоматического регулирования;
устройство и принцип действия элементов автоматики;
режим работы и характеристики автоматических систем регулирования;
принцип действия и сравнительные характеристики автоматических регуляторов;
условное графическое изображение элементов автоматики;
методы, средства и перспективы развития автоматизации тепловых процессов.
Студенты должны уметь:
читать схемы автоматизации;
пользоваться контрольно-измерительными приборами, инструментами при экспериментальном исследовании систем автоматики с учетом требований техники безопасности;
пользоваться каталогами, справочной и технической литературой;
оценивать качество функционирования автоматической системы регулирования;
пользоваться периферийными устройствами системы автоматического регулирования (САР);
квалифицированно пользоваться средствами автоматизации тепловых процессов, обеспечивая высокую их эффективность.
Из истории развития автоматизации и вычислительной техники
Практическое воплощение идеи автоматизации не было в ходе истории прямым: оно шло то замедляясь, то приобретая бурный темп. Значительным этапом в развитии автоматики было изобретение часов.
В развитие автоматики и вычислительной техники вложен труд многих отечественных и зарубежных ученых.
С именем великого мыслителя М.В. Ломоносова связано начало развития приборостроения. Он вместе с академиком Г.В. Рихманом впервые в
3
мире построил электрический измерительный прибор со шкалой и доказал, что «электричество взвешено быть может».
Автоматический регулятор, принцип которого лежит в основе всех современных регуляторов, был разработан и испытан в 1765 г. И.И. Ползуновым за 20 лет до изобретения регулятора Уатта. В регуляторе Ползунова, однако, в несовершенном виде был заложен принцип прямой и обратной связи.
Академик Б.С. Якоби создал электродвигатель (1834 г.) и синхронную передачу. В 1850 г. Е.Х. Ленц разработал осциллограф. Изобретатель А.П. Давидов в 1865 г. создал следящий привод. В 1874 г. В.Н. Чиколевым был разработан электрический регулятор со следящей системой. Профессор Петербургского технологического института И.А. Вишнеградский в1877 г. разработал основы теории автоматического регулирования.
Дальнейшее развитие теория автоматического регулирования получила в работах А.М. Лянукова и особенно в трудах отца русской авиации проф. Н.Е. Жуковского.
Огромный скачок в развитии автоматического управления был совершен, когда в САР (системы автоматического регулирования) стали включаться быстродействующие электронные вычислительные машины. Развитие вычислительной техники сделало возможным создание больших автоматических систем управления сложными производственными процессами и целыми отраслями промышленности.
Первые электронные вычислительные машины были построены на электронных лампах. Они имели низкую надежность и большие габаритные размеры. Их рождение совпало с началом развития ядерной энергетики и ракетной техники.
В настоящее время необходимо повышение уровня автоматизации производства, всё большее внедрение автоматических систем в различные сферы хозяйственной деятельности промышленных предприятий – в проектирование, управление оборудованием и технологическими процессами.
Повышение цен на энергоносители привело к необходимости выбора оптимальных вариантов между системами централизованного теплоснабжения потребителей теплоты путем строительства теплоэлектроцентралей и крупных районных котельных, в том числе атомных, снижение удельных расходов топлива, а также организации автономных более экономичных децентрализованных систем. Создания энергосберегающих технологий, проектирование и изготовление более экономичных теплообменников, отопительных приборов, кондиционеров и другого оборудования теплогазоснабжения (ТГС) и системы кондиционирования микроклимата (СКМ), автоматизированных отопительных котлов и котельных установок, расширение для этих целей номенклатуру и производство приборов, оборудования и других средств автоматизации.
4
1. ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (ТАР)
1.1.Основные понятия и определения ТАР
Внастоящее время под термином «автоматизация» понимается применение и внедрение автоматических устройств, приводящих к освобождению человека от непосредственного участия в технологических процессах. Теоретическую и научную базу автоматизации составляет целая область знаний – автоматика. Современная автоматизация основана на достижениях различных областей знания: математики и электроники, физики
ихимии, кибернетики бионики. Влияние автоматизации распространяется даже на область психологии и философии.
По степени автоматизации производства различают частичную, комплексную и полную автоматизацию.
Частичная автоматизация – это автоматическое выполнение отдельных производственных операций, осуществляемое в тех случаях, когда определенные технологические процессы вследствие своей сложности
ибыстродействия невыполнимы человеком.
Комплексная автоматизация – это автоматическое выполнение всех основных производственных операций участка, цеха завода, электростанции и т. д. как единого взаимосвязанного комплекса. Функции человека здесь ограничиваются контролем и общим управлением.
Полная автоматизация – высшая ступень, при которой автоматизируются все основные и вспомогательные участки производства, включая систему управления и контроля. Управление и контроль автоматизируются с помощью вычислительных машин или специализированных автоматических устройств. Функции человека при полной автоматизации сводятся к наблюдению за работой оборудования и устранению возможных неисправностей.
В зависимости от выполняемых функций автоматизация классифицируется на следующие основные виды: управление, контроль, сигнализация, блокировка, защита и регулирование.
Управление – совокупность действий, направленных на поддержание функционирования объекта в соответствии с заданной программой, выполняемых на основе определенной информации о значениях параметров управляемого процесса.
Автоматический контроль – автоматическое получение и обработка информации о значениях контролируемых параметров объекта с целью выявления необходимости управляющего воздействия.
Непрерывный контроль – это контроль, при котором контролируемые параметры постоянно сопоставляются с заданными величинами.
5
Дискретный контроль – это контроль, при котором сопоставление параметров осуществляется периодически. Контроль также классифицируется на местный и дистанционный.
Сигнализация – это преобразование информации о функционировании контролируемого объекта в условный сигнал, понятный дежурному и обслуживающему персоналу. Сигнализация обычно разделяется на технологическую и аварийную.
Блокировка – это фиксация механизмов, устройств в определённом состоянии в процессе их работы. Она позволяет сохранить механизм устройства в фиксированном положении после получения внешнего воздействия, что повышает безопасность обслуживания, надежность работы оборудования, обеспечивает требуемую последовательность включения механизмов, устройств, а также ограничивает перемещение механизмов в пределах рабочей зоны.
Автоматическая защита – это совокупность методов и средств, прекращающих процесс при возникновении отклонений от допустимых значений контролируемых параметров.
Автоматическое регулирование – это автоматическое обеспечение заданных значений параметров, определяющих требуемое протекание управляемого процесса в соответствии с установленной программой. Совокупность объекта регулирования и автоматического регулятора называют системой автоматического регулирования (САР).
В САР различают прямую и обратную связь. Прямая связь – это воздействие каждого предыдущего элемента регулятора на последующий. Обратная связь – это воздействие одного из последующих элементов регулятора на предыдущий. Обратная связь бывает положительная, когда направление её воздействия совпадает с направлением воздействия предыдущего элемента на последующий, и отрицательная в противоположном случае.
Структурные схемы автоматического контроля, регулирования и управления
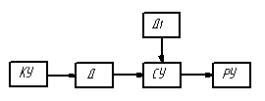
Схема системы автоматического контроля представлена на рис.1.
Рис. 1. Схема системы автоматического контроля
Контролируемая величина с контролируемого устройства (КУ) поступает на датчик (Д), в котором осуществляется преобразование контро-
6
лируемой величины в форму, удобную для измерения. С датчика (Д) сигнал поступает в сравнивающее устройство (СУ), в котором происходит сравнивание сигнала контролируемой величины с эталонным сигналом, поступающим на (СУ) с датчика (Д1) задающего устройства. Полученный результат сравнения поступает на регистрирующее устройство (РУ), которое в зависимости от требований записывает значения контролируемой величины, отображает её или сигнализирует об определенном её состоянии.
Если передаваемое воздействие зависит только от значения регулируемого параметра, т.е. не зависит от времени, то такую связь считают жесткой. Жесткая обратная связь действует как в установившемся, так и в переходном режимах. Гибкой обратной связью называют связь, действующую только в переходном режиме. Гибкая обратная связь характеризуется передачей по ней на вход первой или второй производной от изменения управляемой величиной по времени. У гибкой обратной связи сигнал на выходе существует только тогда, когда управляемая величина изменяется во времени.
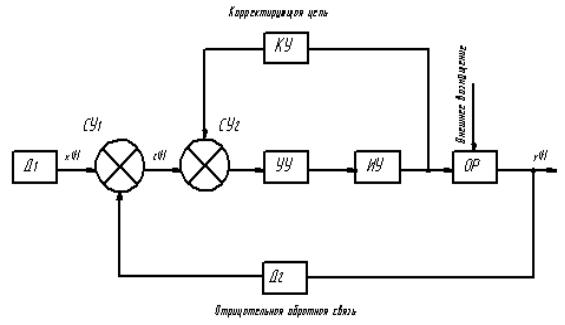
Система автоматического регулирования приведена на рис. 2.
Рис. 2. Схема системы автоматического регулирования
Датчик (Д1) задающего устройства вырабатывает входную величину (сигнал) x(t). Выходная величина (сигнал) y(t) поступает на датчик (Д2), где преобразуется в форму, удобную для дальнейшей обработки (например, в электрическом напряжении). Входная и выходная величины поступают на сравнивающее устройство (СУ 1), на выходе которого образуется сигнал рассогласования (ошибки) z(t), равный разности между входной и выходной величинами, т.е. z(t) = x(t) – y(t). В управляющем устройстве
7
(УУ) сигнал ошибки усиливается, проходит обработку и поступает на исполнительное устройство (ИУ), где преобразовывается в управляющее воздействие, действующее на объект регулирования (ОР). Для обеспечения требуемых качественных показателей работы системы применяют корректирующие устройства (КУ), которые могут быть включены параллельно или последовательно.
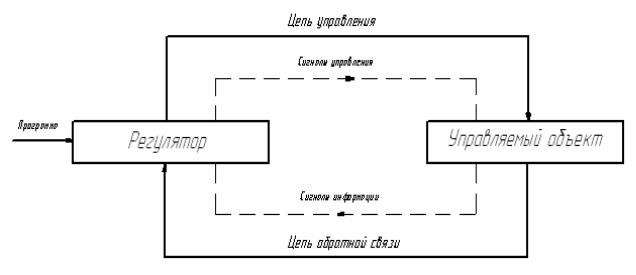
Система автоматического управления приведена на рис. 3.
Рис. 3. Схема системы автоматического управления
1.2. Режимы работы автоматических систем регулирования
Установившийся и переходный режимы
Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные функции и обеспечивающих в комплексе весь процесс управления: получение первичной информации, усиление сигналов информации и преобразование их в управляющие сигналы, воздействующие на исполнительные механизмы.
В соответствии с выполняемыми функциями все элементы, составляющие автоматические системы, классифицируются на три самостоятельные группы:
-измерительная, представляет собой различного типа датчики, информирующие о достижениях определенного значения контролируемого параметра;
-преобразовательная, служащая для усиления информационного сигнала и преобразования его в другой, удобный для управления;
-исполнительная, включающая в себя комплекс механизмов, непосредственно осуществляющих управление.
8
Все элементы любой группы имеют вход и выход. Входной величиной элемента могут быть:
-мгновенные значения физических величин (скорости, ускорения, дав-
ления, температуры, перемещения, освещенности, тока, напряжения и т.д.);
-амплитудные значения синусоидальных или импульсных электриче-
ских величин (тока или напряжения);
-частота физических величин и т.д.
Выходной величиной может быть электрический сигнал, различный по величине и характеру. Входную величину обычно называют входным сигналом, а выходную – выходным сигналом.
Элементы, как и системы, могут работать в различных режимах. Режим работы элемента (системы) при постоянных во времени входной и выходной величинах называются установившимся или статическим режимом. В установившемся режиме x(t)=const и y(t)=const.
Режим работы при переменных во времени входной и выходной (или одной из них) величине называют динамическим.
Процесс перехода элемента из одного установившегося состояния в другое называют переходным процессом. Так как во время переходного процесса y(t) изменяется, то переходный процесс является частным случаем динамического режима.
Характеристики установившегося режима (статические)
Функциональная зависимость выходной величины Y от входной Х, выраженная математически или графически, называется статической характеристикой элемента Y=f(X).
По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, т.е. величина Y находится в определенной непрерывной зависимости от величины X (рис.4), то такой элемент называют источником первичной информации или датчиком. Если статическая характеристика элемента изменяется скачком (рис. 5), т.е. практически осуществляется включение или отключение при достижении входной величины X определенных, то такой элемент называется реле.
Элементы для конкретных автоматических систем выбираются по ряду показателей, их характеризующих, – коэффициенту передачи, порогу чувствительности, погрешности.
Коэффициент передачи – отношение выходной величины элемента Y к входной Х, т.е. K=Y/X. Если Y и Х одной физической природы, то K – коэффициент усиления.
Порог чувствительности – это наименьшее (по абсолютному значению) значение входного сигнала, способное вызывать изменение выходного.
9
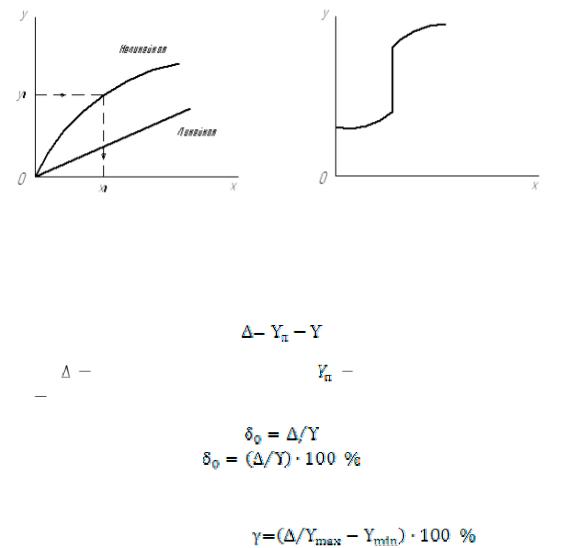
Рис. 4. Характеристика датчика |
Рис. 5. Характеристика реле |
Погрешность элемента появляется из-за неточной тарировки или градуировки (вследствие разброса параметров) элементов в процессе их изготовления (в пределе установленных допусков):
,
где |
абсолютная погрешность; |
полученный выходной сиг- |
нал; Y действительный выходной сигнал.
;
,
где
 относительная погрешность;
относительная погрешность;
 ;
;
где γ– приведенная погрешность.
Характеристики переходного режима (динамические)
В реальных системах автоматики сигналы от элементов, как правило, бывают непостоянными. В большинстве случаев они меняются во времени. Для элементов, составляющих системы автоматики, основным режимом работы является режим, при котором входная и выходная величины не остаются постоянными. Такой режим называется динамическим.
Процесс перехода из одного установившегося состояния в другое называется переходным процессом, который является частным случаем динамического режима.
Переходный процесс характеризуется переходной характеристикой. Под переходной характеристикой понимают зависимость выходной величины от времени Y=f(t) при скачкообразном изменении входной величины
(рис. 6, 7).
10