

1736
.pdfния измеряемой среды, а реле РД-2Б-ОМ5 - с зоной нечувствительности, направленной в сторону понижения давления.
Реле поплавковое типа РП-40. Назначение – контроль уровня жидкости с температурой 5-60 °С в различного рода резервуарах. Применяется для сигнализации достижения заданного уровня, включения и отключения подпиточных насосов при отклонении уровня в расширительном баке от заданного значения. Состоит из чувствительного элемента – поплавка и двух ртутных переключателей. Устанавливается непосредственно около резервуара.
Гидравлические системы автоматического интегрального регулирования
Наряду с рассмотренными электрическими регуляторами находят применение также и гидравлические регуляторы (рис. 25). Их используют для регулирования давления, расхода и уровня.
Рис. 25. Гидравлическая система автоматического интегрального регулирования уровня
Измерительный преобразователь – поплавок 1 преобразует отклонение регулируемой величины (уровня воды) в пропорциональное перемещение золотника 2 управляющего подачей масла в поршневой исполнительный механизм 3. При смещении золотника в ту или иную сторону от среднего положения на поршне исполнительного механизма возникает разность давлений, пропорциональная величине смещения штока.
Промышленность выпускает унифицированные узлы для агрегатного комплектования гидравлических регуляторов.
31

Пневматические системы автоматического регулирования
В пневматических системах воздействие между отдельными элементами и воздействие на регулирующий орган осуществляется с помощью сжатого воздуха.
Основным элементом пневматических систем регулирования является устройство типа «сопло – заслонка», в котором механическое перемещение чувствительного элемента преобразуется в сигнал сжатого воздуха.
С учетом большого сходства в конструкциях различных пневматических регуляторов, рассмотрим только регулятор типа 04. Этот регулятор может встраиваться в компенсационные измерительные приборы, образуя системы регулирования температуры, давления, расхода и других параметров. По характеру регулирующего воздействия система регулирования 04 является пропорционально-интегральной и осуществляет регулирование с изодромной обратной связью (рис. 26).
 Б
Б
Рис. 26. Пневматические системы автоматического регулирования давления с изодромной обратной связью
Регулируемое давление подводится к манометрической пружине 4, которая раскручивается или скручивается при его изменении. Деформация пружины с помощью системы рычагов вызывает перемещение заслонки 7 относительно сопла 6. К соплу через дроссель 8 непрерывно подается сжатый воздух по трубке 9. Так как проходное сечение трубки в несколько раз больше сечения дросселя, то перемещение заслонки вызывает изменение давления воздуха, поступающего в камеру пневматического реле 1. Мембранная коробка 15 этого реле через шток 13 перемещает золотник 12,
32
дросселирующий поток воздуха через сопла 11 и 10. Если сопло 6 полностью открыто, то давление под мембраной равно атмосферному и золотник 12 прикрывает собой сопло10. Одновременно через выпускное сопло 11 золотник соединяет с атмосферой идущую к исполнительному механизму командную линию, отчего давление под мембраной исполнительного механизма снижается до атмосферного и клапан занимает крайнее положение, например, закрывается. Если сопло 6 полностью перекрыто заслонкой, то золотник закрывает сопло 11 и открывает сопло 10 , через которое воздух подается в командную линию 1. Давление над мембраной клапана повышается, и он занимает второе крайнее положение. При промежуточных положениях заслонки клапан занимает промежуточное положение.
Устройство обратной связи состоит из двух пар сильфонов 2, помещенных в камеры А и Б. Пространство между внутренними сильфонами заполнено толуолом. Внутренние сильфоны соединены штоком 5, а жидкостные полости сообщаются по трубке с игольчатым вентилем 3.
При пропорционально-интегральном регулировании игольчатый вентиль 3 открыт. Скорость перетекания жидкости из полости в полость зависит от степени открытия вентиля и от разности давления в камере А и Б. Когда рассогласования нет и значение регулируемой величины равно заданному, то давления жидкости в полостях А и Б равны.
Если давление в командной линии начинает увеличиваться, то механизм обратной связи отодвинет заслонку 7 от сопла 6. Поскольку давление в полости А больше давления в полости Б, то жидкость начнет перетекать через игольчатый вентиль 3 из полости А в полость Б, шток будет перемещаться влево и постепенно давление в обеих полостях выравнивается. Но при этом заслонка опять приблизиться к соплу и командное давление увеличится, в результате чего регулирующий орган переместится и займет новое положение при изменившихся условиях.
Такая обратная связь, при которой устраняется статическая неравномерность, называется изодромной.
Регулятор типа 04 дает на выходе пневматический сигнал давлением 0…100 кПа. Для питания регулятора используется подаваемый через фильтр очищенный сжатый воздух давлением 140 кПа.
Электронные регулирующие приборы системы МЗТА
Для автоматизации парогенераторов применяются (приборы) регуляторы, выпускаемые Московским заводом тепловой автоматизации (МЗТА). МЗТА выпускает регуляторы серии «Каскад». Особенностью этих регуляторов является использование унифицированного сигнала постоянного тока 0-5 (0-20) мА. Приборы построены на полупроводниковых и магнитных элементах и представляют собой совокупность унифицированных нормализованных блоков. Регуляторы «Каскад» являются электрической ветвью Государственной системы приборов (ГСП).
33
Отличительной особенностью аппаратуры ГСП состоит в том, что ее приборы и устройства имеют единые параметры входных и выходных сигналов и нормализованные присоединительные размеры. Унифицированные сигналы можно использовать многократно, и тем самым сокращается количество применяемых приборов.
Врегуляторах «Каскад» каждый блок является самостоятельным прибором. В измерительном блоке сигналы от измерительных преобразований суммируются и сравниваются с сигналами от задатчика.
Вслучае отклонения регулируемых величин от заданного значения на выходе измерительного блока возникает сигнал, поступающий в электронный блок. В электронном блоке суммарный сигнал усиливается до величины, необходимой для работы пускового устройства, и преобразуется по требуемому закону под действием устройства обратной связи.
Электронные регуляторы относятся к регуляторам прерывистого действия. Их выходной сигнал представляет собой последовательность импульсов различной продолжительности и знака, управляющих пусковыми устройствами.
Вкачестве пусковых устройств используются тиристорные и магнитные усилители, реже – реверсивные магнитные пускатели. Пусковое устройство воздействует на исполнительный механизм постоянной скорости, интегрирующий импульсный сигнал на выходе регулятора. Требуемый закон регулирования формируется только на выходе регулирующего органа.
Регулирующие приборы системы «Контур»
В состав системы «Контур» входят регулирующие приборы Р-25 и корректирующие приборы К-15; К-16; К-26. Приборы Р-25 совместно с исполнительным механизмом постоянной скорости осуществляют регулирование по закону ПИ-регулирования. Эти приборы работают совместно с электрическими исполнительными механизмами МЭО, МЭОК, регулирующими клапанами марок 25ч939нж, 25ч940нж, 25ч914нж (через магнитные пускатели или бесконтактно).
Корректирующие приборы типа К15 применяются в каскадных схемах автоматического регулирования; с помощью этих приборов осуществляется изменение задания другому регулятору. Корректирующие приборы К16 служат для преобразования измеряемого параметра и реализации функций дифференцирования, интегрирования, апериодического или пропорционального преобразования.
Корректирующие приборы типа К26 обеспечивают сигнализацию заданных предельных значений измеряемого параметра путем изменения состояния выходных контактов.
Основные технические данные системы «Контур»: потребляемая мощность 25 Вт, напряжение питания 220 В, частота 50 Гц, температура
34
окружающей среды 5-50 °С и ее относительная влажность 30-80 %. Зона нечувствительности 0,5-5 % номинального диапазона входного сигнала; масса прибора 5 кг.
Аналоговый комплекс электрических средств регулирования на базе микроэлектроники (АКЭСР)
Современные электрические средства автоматизированного регулирования разрабатываются по агрегировано - блочному принципу. Блоки образуют агрегированный комплекс (систему) технических средств (КТС), с помощью которого для конкретного технологического объекта путем набора определенных блоков проектируют САР с требуемыми статическими и динамическими свойствами.
Каждый блок КТС выпускается заводом приборостроительной промышленности в виде конструктивно законченного изделия. При автоматизации технологических процессов в настоящее время наиболее широкое применение находят агрегированные комплексы электрических средств регулирования АКЭСР, АКЭСР-2, Каскад-2, Контур, КМ2201.
Комплекс АКЭСР включает в себя следующие группы блоков:
-функциональных устройств;
-регулирующих устройств;
-ввода – вывода информации;
-устройства оперативного управления;
-источников группового питания.
По конструктивным признакам изделия комплекса делятся на приборные и шкафные.
Регулирующие приборы типа РП-4
Входят в комплекс приборов второй очереди аппаратуры АКЭСР (агрегатный комплекс электрических средств регулирования). Предназначены для применения в схемах автоматического регулирования температуры, соотношения температур, а также давления, расхода, перепада давлений.
Приборы РП-4 совместно с исполнительным механизмом постоянной скорости реализуют ПИзакон регулирования. Приборы работают совместно с электрическими исполнительными механизмами и регулирующими клапанами с электродвигателем.
Прибор рассчитан на прием четырех унифицированных сигналов постоянного тока 0-5 мА (0-20 мА).
35

Электронно-гидравлическая система
автоматическогорегулирования «Кристалл»
При автоматизации технологических процессов, связанных с применением регулирующих органов, требующихся для приведения их в движение больших усилий, особенно при поступательном их движении, целесообразно использовать гидравлические исполнительные механизмы. В этой связи созданы различные комбинированные электронно-гидравлические системы автоматического регулирования, в которых точность и компакт-
ность электрических измерительных и командных устройств сочетается с преимуществами гидравлических исполнительных механизмов.
Электронно-гидравлическая система автоматического регулирования «Кристалл» имеет следующую структурную схему (рис. 27):
Рис. 27. Электронно-гидравлическая система автоматического регулирования «Кристалл
Первичные преобразователи 1 (не более трех) измеряют регулируемую величину и преобразуют ее в сигнал переменного тока. В транзисторном усилителе 2 эти сигналы суммируются между собой и сигналом задатчика 3, усиливаются и подаются в обмотки гидравлическим исполнительным механизмом 6. Устройство обратной связи 7 преобразует перемещение вала исполнительного механизма в электрический сигнал, который подается на вход усилителя. Дистанционное управление осуществляется с помощью блока 4 с пульта 8.
Всистеме регулирования «Кристалл» могут быть реализованы И-, П-
иПИ-законы регулирования. Эти регуляторы позволяют проводить регуляцию температуры, давления, расхода, уровня, тяги или напора, соотношение «топливо (газ) – воздух» и другие параметры.
36

2.2. Вспомогательные устройства
автоматических систем регулирования
Магнитные пускатели
Магнитный пускатель (рис. 28) представляет собой контактор, применяемый для дистанционного управления трехфазными двигателями в нереверсивном и реверсивном режимах.
Управляющая часть при пуске двигателя работает следующим образом. При подаче напряжения от сети и нажатием кнопки Пуск 1 по цепи (фаза А, предохранитель, обмотка контактора К1 замкнутый контакт 2К контактора К2, кнопочный выключатель Пуск 1 и кнопочный выключатель Стоп, замкнутые контакты 1РТ и 2РТ двух тепловых реле, предохранитель, фаза С) потечет ток. Контактор К1 срабатывает, и его рабочие контакты 1РК1, 1РК2, 1РК3 замыкаются, а контакт 1К размыкается, в результате чего двигатель подключается к сети и вал двигателя вращается по часовой стрелке. При замыкании блок-контакта БК1 кнопочный выключатель Пуск 1 может быть опущен. Двигатель останавливается нажатием кнопки Стоп. В обратную сторону двигатель включается кнопочным выключателем Пуск 2.
Рис. 28. Электрическая схема магнитного пускателя
Контакты 1К и 2К предназначены для предохранения от замыкания в сети переменноготока при одновременном включении контакторов К1 и К2.
37

При нормальной нагрузке на двигатель контакты тепловых реле 1РТ и 2РТ замкнуты. При перегрузке двигателя тепловые реле срабатывают, размыкая контакты 1РТ и 2РТ, которые в свою очередь прерывают подачу от сети напряжения.
Магнитные усилители
Магнитные усилители представляют собой электромагнитное устройство, в котором связь выхода и входа осуществляется через магнитное поле. В основу принципа его действия положена нелинейная зависимость магнитной проницаемости ферромагнитных материалов от напряженности постоянного подмагничивающего поля, созданного или изменяемого входным сигналом.
Магнитные усилители подразделяют на простые и с самонасыщением. У первых по рабочим обмоткам протекает только переменный ток, а в усилителях второй группы по рабочим обмоткам протекает ток, содержащий постоянную составляющую.
Основными параметрами магнитных усилителей являются характеристики управления, т.е. взаимосвязь между установившимися значениями входной и выходной величин, например между рабочим током нагрузки и током управления. Простейший магнитный усилитель представлен на рис. 29.  - нагрузка усилителя включена последовательно с рабочей
- нагрузка усилителя включена последовательно с рабочей
обмоткой, питание которой осуществляется переменным током .
.
Рис. 29. Электрическая схема простейшего магнитного усилителя
При изменении входного напряжения |
будет изменяться подмаг- |
ничивающее постоянное поле и магнитная проницаемость µ ферромагнитного магнитопровода, а следовательно, и индуктивность рабочей обмотки. В результате будет меняться ток выходной цепи (рис. 30 и рис. 31).
38
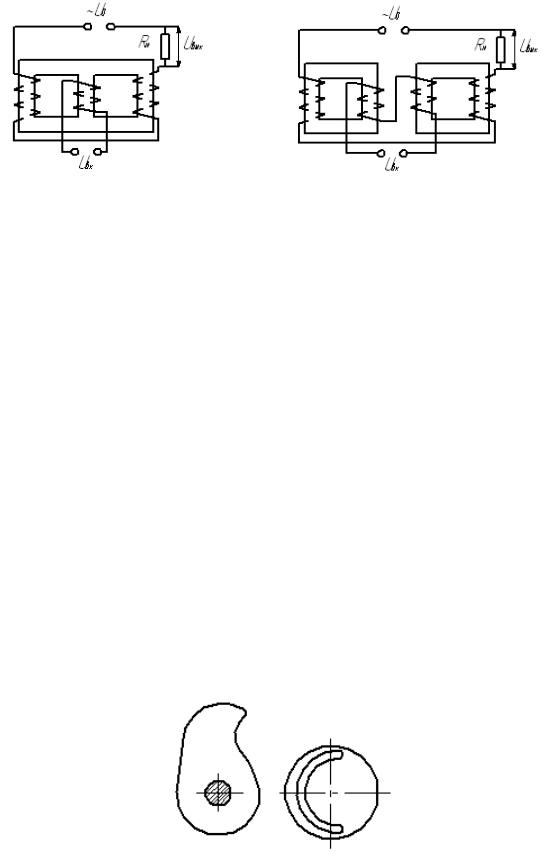
Рис. 30. На одном Ш-образном |
Рис. 31. На двух магнитопроводах |
магнитопроводе |
|
В целом магнитные усилители являются надежными элементами автоматики, к достоинствам которых следует отнести высокую прочность при практически неограниченном сроке службы, а также в отличие от электронных ламповых усилителей мгновенную готовность к действию. Удобно и суммирование сигналов в магнитном усилителе, для этого достаточно иметь соответствующее число входных обмоток. Магнитные усилители нечувствительны к радиоактивным излучениям. Недостатки – сравнительно большая масса и значительная инерционность, обусловленная заметным количеством энергии, запасаемой в магнитном поле дросселя.
Задающие устройства
Большинство задающих устройств (рис. 32) состоит из трех основных элементов: привода, носителя программы и элемента настройки. В зависимости от конструктивного оформления устройства отдельные элементы могут быть функционально совмещены. Наиболее распространенными приводами задающих устройств непрерывного действия являются синхронные электрические двигатели и часовые механизмы. В качестве носителей программы в задающих устройствах непрерывного действия обычно используют механические устройства, рычажные механизмы и функциональные потенциометры.
Рис. 32. Задающие устройства: плоский закрытый и плоский открытый задающие механизмы
39
Механическими носителями программы в задающих устройствах непрерывного действия являются кулачковые механизмы различной конструкции. Назначение кулачковых механизмов состоит в преобразовании вращательного движения кулачка или прямолинейного движения кулачковой линейки в качательное или прямолинейное движение щупа толкателя.
Кроме кулачковых механизмов, в качестве механических носителей заданной функции применяют рычажные механизмы, отношение плеч которых используется, например, для установления заданного соотношения расходов в струйном гидравлическом регуляторе.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
Все носители программ дискретных задающих устройств могут быть условно разделены на две категории: сменные и постоянные. К первой категории относятся перфокарты, перфоленты, ленты с нанесенными оптическими метками (использующие неравномерную отражательную способность), магнитные ленты и диски (два последних носителя при смене не заменяются, стираниестарой программы и записьновой равноценны замене).
Вторую категорию составляют «схемные» носители программы, представляют собой многоценные переключатели, элементы которых связаны между собой в соответствии сзаданнымалгоритмом функционирования.
Первичные преобразователи и их классификация
Первичным преобразователем (датчиком) называют элемент, который устанавливают в технологическое оборудование и который первым воспринимает контролируемый параметр. Он преобразует измеряемые физические величины в сигналы, удобные для дальнейшей передачи в измерительные и управляющие устройства.
В зависимости от принципа действия первичные преобразователи можно разделить на две группы: параметрические и генераторные. К параметрическим относятся следующие типы преобразователей: потенцио-
метрические, индуктивные, емкостные, тензометрические и др.
К генераторным – термоэлектрические (термопары), фотоэлектрические, пьезоэлектрические и тахометрические39 преобразователи. Они работают автономно, т.е. не нуждаются в подводе внешней энергии.
По виду входного сигнала первичные преобразователи подразделяются на следующие группы: температуры, давления, разряжения, расхода, уровня, состава и влажности веществ, плотности, перемещения, скорости, ускорения и т.д.
По виду выходного сигнала первичные преобразователи подразделяют на несколько групп. Одна группа преобразует контролируемую величину в изменение активного сопротивления, другая – в изменение емкости, третья – в изменение индуктивности и т.д.
40