

2444
.pdfВидеосигнал, регистрируемый ПЗС-формирователем, поступает на блок аналоговой обработки БАО, осуществляющий усиление, двойную коррелированную выборку и фильтрацию. С выхода БАО сформированный сигнал поступает на вход АЦП, время преобразования которого равно 5 мкс. Отфильтрованный видеосигнал поступает с выхода АЦП на вход БЗУ. Основные функции БЗУ включают в себя согласование скорости АЦП со скоростью обмена по каналу прямого доступа; анализ очередного цифрового отсчета Di j (i — адрес строки, j — адрес элемента ПЗС), запись Di j, удовлетворяющего критерию предварительной сортировки, в буферную память: определение и запись координат локальных максимумов в буферную память максимумов БПМ; формирование запроса прерывания к ИПДП при заполнении одного из подбуферов.
Ввод полутоновых изображений в ЭВМ характерен для применяемых в системах автоматизации научного эксперимента оптических многоканальных анализаторах (ОМА). В качестве примера рассмотрим ОМА, описанный в работе [22].
В основе функционирования ОМА лежит принцип фиксации оптического изображения в фотоприемном устройстве с последующим аналого-цифровым преобразованием и запоминанием результатов для обработки. Применение в качестве фотоприемного устройства матричного прибора с зарядовой связью (ПЗС) дает возможность сравнительно просто согласовать между собой измерительную и вычислительную части комплекса.
Формат фиксируемого изображения определяется типом приемной матрицы ПЗС и может составлять 512 X 512, 512 X 256 X X 256 точек. Число уровней квантования по интенсивности задается разрядностью используемого АЦП и составляет 1024. Дальнейшее его увеличение нецелесообразно из-за ограниченного динамического диапазона используемых ПЗС-матриц. ОМА обеспечивает возможность работы с камерами как в малокадровом, так и в стандартном телевизионном режимах. В частности, для регистрации непрерывных изображений в ОМА может использоваться миниатюрная камера на серийных ПЗС [23], для исследования процессов импульсного характера камера, работающая в малокадровом режиме.
Для управления работой ОМА разработан спецпроцессор, под управлением которого производится аналого-цифровое преобразование, запоминание и простейшая обработка результатов, а также обеспечивается возможность вывода зафиксированной информации на видеоконтрольное устройство (ВКУ).
Универсальная мини-ЭВМ типа СМ-4 в составе комплекса позволяет организовать коллективный режим работы и обрабатывать результаты эксперимента. Наличие собственной, независимой от ЭВМ, памяти и спецпроцессора наряду с повышением быстродействия комплекса дает возможность использовать его в автономном режиме в качестве электронного фотоаппарата.
Для повышения достоверности результатов эксперимента необходимо учитывать темновой фон приемной ПЗС-матрицы, вычитание которого в описываемом приборе организовано аппаратно. В связи с уменьшением объема информации, вводимой в вычислительную машину, и сокращением промежутка
времени между приемом результатов эксперимента и приемом темновой картины ослабляется влияние на
45
конечные результаты изменения темновой картины.
В состав оптического многоканального анализатора входят следующие основные структурные элементы (рис. 1.12): система приема информации СПИ, система хранения информации СХИ, спецпроцессор СП; видеоконтрольное устройство ВКУ, графопостроитель ГП, блок сопряжения с миниЭВМ БС и мини-ЭВМ.
Рис. 1.12. Обобщенная структурная схема ОМА Система приема информации (рис. 1.13) осуществляет опто-электронное и аналого-цифровое
преобразование информации, передачу цифровых данных для запоминания.
46
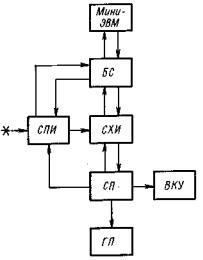
Рис. 1.13. Структурная схема системы приема информации В приѐмной камере ПК импульсное оптическое излучение попадает на ПЗС-матрицу. Образованный
на ней зарядовый рельеф соответствует пространственному распределению интенсивности исследуемого оптического излучения. Накопленный в матрице заряд построчно считывается с одновременным выводом видеосигнала на вход аналого-цифрового преобразователя АЦП. Параллельно АЦП управляется последовательностью сигналов Пуск АЦП. Цифровые данные с выхода АЦП передаются в систему хранения информации. В конце каждого цикла преобразования АЦП вырабатывает сигнал Конец преобразования для схемы обработки запросов СОЗ, по которому организуется запись поступившей от АЦП информации в память хранения информации.
Началу передачи информации предшествует вырабатываемый приемной камерой сигнал Начало работы, обеспечивающий приоритетность режима приема поступающей от АЦП информации над всеми другими режимами работы ОМА. После окончания передачи информации приемная камера вырабатывает сигнал Конец работы и все системы комплекса возвращаются в исходное состояние.
Темновая картина регистрируется аналогично полезной информации, но сопровождается сигналом
Передача фона. При наличии этого сигнала цифровые данные, поступающие в систему хранения
47
информации от АЦП, вычитаются из хранящихся данных.
Система хранения информации СХИ (рис. 1.14) фиксирует результаты эксперимента в цифровом виде, обеспечивает их выдачу для контроля и обработки. Основу СХИ составляет запоминающее устройство ЗУ емкостью 262 144 девятиразрядных ячеек. Такой объем памяти позволяет хранить информацию об изображении форматом 512 X 512 точек. Разрядность ЗУ при необходимости можно увеличить до 16. Система хранения информации имеет три основных режима работы: хранения, приема результатов эксперимента и обмена информацией с мини-ЭВМ. В режиме хранения информация непрерывно выводится из ЗУ и отображается на экране видеоконтрольного устройства. Для согласования скорости развертки изображения на экране ВКУ (см. рис. 1.12) с быстродействием запоминающего устройства информация выводится через восьмиразрядные сдвиговые регистры СР, в которые в каждом цикле чтения параллельно заносится содержимое восьми соседних ячеек ЗУ. Число сдвиговых регистров соответствует числу двоичных разрядов ЗУ. После каждого цикла чтения информация в регистрах последовательно сдвигается и передается для отображения на экране ВКУ. Скорость сдвига выбрана такой, чтобы к окончанию каждого цикла чтения из ЗУ через ВКУ прошла информация о всех восьми точках, считанная в предыдущем цикле.
Адрес обращения к ЗУ в режиме хранения задается счетчиком адреса вывода CAB (см. далее рис. 1.15), с выходов которого он через коммутатор адреса КА поступает на адресные входы ЗУ (см. рис. 1.14).
48
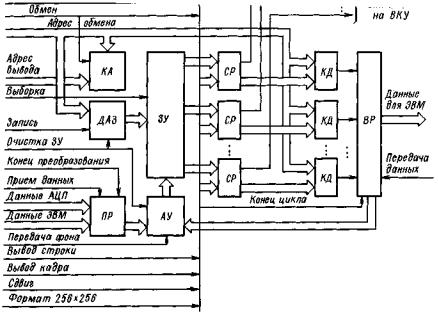
Рис. 1.14. Структурная схема системы хранения информации
После каждого цикла чтения в режиме хранения содержимое CAB увеличивается на 1.
Врежиме приема результатов эксперимента и режиме обмена информацией с мини-ЭВМ адрес обращения к ЗУ задается счетчиком адреса обмена САО и поступает на адресные входы ЗУ через коммутатор адреса КА, управляемый спецпроцессором.
Врежимах приема и обмена, как и в режиме хранения, обращение производится одновременно к восьми ячейкам ЗУ в каждом цикле. Если цикл обмена является циклом чтения, то считанная информация заносится в те же сдвиговые регистры СР, что и в режиме хранения. С параллельных выходов этих регистров информация поступает на коммутаторы данных КД, управляемые тремя младшими разрядами счетчика адреса обмена САО. С выходов коммутаторов данных информация, соответствующая одной точке изображения, заносится в выходной регистр ВР и может быть передана в мини-ЭВМ.
Если цикл обмена является циклом записи, то обращение производится также к восьми ячейкам ЗУ, но сигнал записи подается только на одну из них, определяемую дешифратором адреса записи ДАЗ по состоянию трех младших разрядов счетчика адреса обмена.
После каждого цикла обращения к ЗУ в режимах приема и обмена с мини-ЭВМ содержимое счетчика адреса обмена увеличивается на 1 при форматах изображения 512х512х512х256 точек и на 2 при формате
256х256 точек (первая цифра в обозначении формата соответствует числу точек в строке). Такая
49
организация адресации позволяет переходить от форматов с числом точек в строке 512 к формату с числом точек в строке 256 простым исключением из рассмотрения точек с нечетными адресами. На экране ВКУ эти точки гасятся посредством записи нулевой информации в соответствующие разряды сдвиговых регистров
СР.
Арифметическое устройство АУ предназначено для вычитания темновой картины. На АУ поступает информация, считанная из ЗУ, и информация, содержащаяся в приемном регистре ПР. Если информация в ПР предназначена для записи в ЗУ, что имеет место при приеме результатов эксперимента и при приеме информации от вычислительной машины, арифметическое устройство без изменения заносит ее на информационные входы ЗУ. Если же в приемный регистр поступает информация о темновом фоне приемной ПЗС-матрицы, циклу записи в ЗУ предшествует цикл чтения; из считанного кода в АУ вычитается код, поступивший в приемный регистр, и результат записывается в ЗУ. Если в результате вычитания получается отрицательное число, в соответствующую ячейку ЗУ заносится нулевая информация, так как в этом случае отличие содержимого ЗУ от принятого значения темнового фона находится в пределах погрешности измерительного тракта. Фоновая картина передается сразу за полезной информацией. Режимы арифметического устройства определяются сигналом Передача фона с приемной камеры. Арифметическое устройство используется также для организации очистки ЗУ по команде мини-ЭВМ. В этом случае на входы ЗУ с выходов АУ подается нулевая информация и устанавливается режим записи по всем адресам.
В автономном режиме информация для обработки извлекается в процессе вывода на ВКУ без дополнительного обращения к ЗУ. При этом на графопостроитель выводится содержимое любой строки зафиксированнного в ЗУ изображения в виде графика зависимости яркости от координаты с одновременной индикацией на цифровом табло номера выводимой строки, текущего номера точки, значения яркости в точке и интеграла от яркости по строке в выбранных пределах. Нужная строка выбирается оператором при помощи ВКУ.
Структурная схема спецпроцессора ОМА представлена на рис. 1.15. Задающий генератор ЗГ формирует непрерывную последовательность импульсов с периодом 100 нс, поступающую на вход
50
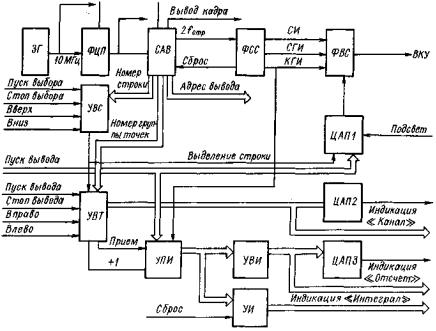
формирователя циклов памяти ФЦП, который организует циклы чтения из запоминающего устройства системы хранения информации с периодом 800 нс. Считанная информация используется для формирования стандартного телевизионного сигнала, подаваемого на видеоконтрольное устройство.
Рис. 1.15. Структурная схема спецпроцессора Одна телевизионная строка формируется из 80 циклов обращения к ЗУ. В течение первых 16 циклов
вывод информации из запоминающего устройства в сдвиговые регистры системы хранения информации не производится и состояние счетчика адреса вывода CAB не изменяется. Во время этих циклов в формирователе синхросерий ФСС формируется строчный гасящий СГИ и синхронизирующий СИ импульсы. В течение последующих 64 циклов чтения ФСС вырабатывает сигнал Вывод строки и считанная информация через сдвиговые регистры системы хранения информации последовательно поступает на вход цифроаналогового преобразователя ЦАП1.
Через каждые 625 периодов удвоенной строчечной частоты (2fстр) формирователь синхросерий ФСС вырабатывает кадровый гасящий КГИ и синхронизирующий СИ импульсы, а также последовательности уравнивающих импульсов. Из последовательностей синхронизирующих (кадровых и строчных) и уравнивающих импульсов формируется полный телевизионный синхросигнал. Этот сигнал поступает на вход формирователя видеосигнала, где смешивается с информационным сигналом, поступающим от ЦАП1.
Образующийся телевизионный видеосигнал подается на вход видеоконтрольного устройства.
Через заданное число строк после начала каждого полукадра формирователь синхросерий ФСС
52
устанавливает счетчик адреса вывода CAB в нулевое состояние и вырабатывает сигнал Вывод кадра, разрешающий занесение считанной информации в регистры сдвига СХИ. При формате изображения 512x512 точек сброс старшего разряда CAB производится только в полукадрах, начинающихся с половины строки, т. е. в два раза реже, чем остальных разрядов, что вызвано необходимостью выводить в каждом полукадре информацию из отдельной области памяти. При меньших форматах изображения сброс старшего разряда CAB осуществляется одновременно со сбросом всех остальных разрядов и информация разных полукадров выводится из одной и той же области памяти.
Таким образом, вывод информации из СХИ начинается всегда из ячейки памяти с нулевым адресом и в одной и той же точке телевизионного растра, близкой к его началу. После завершения вывода 256 строк сигнал Вывод кадра снимается, вывод информации возобновляется в следующем полукадре, когда произведен сброс CAB. Обращение к ЗУ системы хранения информации после считывания обоих полукадров продолжается с перебором адресов (регенерацией динамических ЗУ) и синхронным формированием телевизионного растра.
Содержимое сдвиговых регистров системы хранения информации автоматически обнуляется после прекращения вывода в них считанной информации, в результате чего на экране ВКУ выделяются границы выводимого изображения.
В режиме чтения для передачи данных в вычислительную машину и в режиме вычитания темнового фона занесение считанной из ЗУ информации в регистры сдвига осуществляется независимо от наличия или отсутствия сигналов Вывод строки и Вывод кадра.
Во время приема результатов эксперимента или обмена информацией с мини-ЭВМ работа формирователей циклов памяти не прерывается, а вырабатываемый им в конце каждого цикла сигнал Конец цикла используется для синхронизации 53схемы обработки запросов СОЗ (см. рис. 1.13). При поступлении на СОЗ сигнала Конец преобразования от АЦП или сигнала Запрос обмена от блока сопряжения с мини-ЭВМ
вырабатывается сигнал Обмен, по которому в ближайшем цикле обращения к памяти коммутатор адреса КА (см. рис. 1.14) переключается со счетчика адреса вывода CAB на счетчик адреса обмена САО, а также, если требуется, вырабатывается сигнал Запись, переводящий ЗУ в режим записи. По окончании цикла обмена, если не поступает новых запросов, сигнал Обмен снимается и коммутатор адреса устанавливается на передачу адреса вывода.
С помощью устройства вывода строки УВС (рис. 1.15) выбирается строка зарегистрированного изображения для построения зависимостей яркости от координаты. В процессе считывания вырабатывает сигнал Выселение строки, поступающий на цифро-аналоговый преобразователь ЦАП1. При наличии этого сигнала все элементы выводимой строки передаются на вход формирователя видеосигнала ФВС либо с максимальным, либо с минимальным напряжением независимо от вида считываемой из ЗУ информации. В результате по желанию оператора строку на экране ВКУ можно выделить либо максимальной либо минимальной яркостью.
Процесс выбора строки начинается с подачи оператором сигнала Пуск выбора. Номер выделяемой строки в каждом кадре увеличивается на 1 по сравнению с предыдущим и выделенная строка перемещается по экрану ВКУ. При подаче сигнала Стоп выбора номер выделяемой строки фиксируется и она останавливается на экране ВКУ. Путем подачи сигналов Вверх и Вниз можно сместить выделенную строку на 1 шаг. Таким образом, оператор имеет возможность переместить выделенную строку в любую интересующую его область изображения. Номер выделяемой строки непрерывно отображается на цифровом табло.
Для построения зависимости яркости от координаты необходимо подать сигнал Пуск вывода на
устройство выбора точки УВТ, которое задает номер выводимой точки в строке. Вывод всегда начинается с
54
начала строки и производится только для элементов выделенной строки, для чего на УВТ подается сигнал
Выделение строки.
При совпадении номера выводимой в данный момент точки выделенной строки с номером, задаваемым устройством выбора точки, информация, соответствующая выбранной точке, передается со сдвиговых регистров (см. рис. 1.14) в устройство приема информации УПИ, где фиксируется. В процессе вывода со счетчика адреса вывода CAB определяется номер группы из восьми точек, а номер точки в группе, подлежащей выводу, определяется непосредственно в УВИ последовательным перебором всех номеров от 0 до 7.
Зафиксированное в УПИ значение яркости сравнивается с аналогичным значением для предыдущей точки и через определенное число телевизионных кадров, определяемое абсолютным значением разности кодов двух точек, передается в устройство вывода информации УВИ. После передачи данных в УВИ номер выводимой точки увеличивается на 1. Разность кодов соседних точек необходимо учитывать для согласования скорости вывода информации с быстродействием графопостроителя. Поступившая в УВИ информация передается на вход цифроаналогового преобразователя ЦАПЗ, аналоговый сигнал, с выхода которого поступает на вход графопостроителя. Координата х задается путем цифроаналогового преобразования номера выводимой точки в преобразователе ЦАП2.
Номер выводимой строки и значение яркости в ней отображаются на цифровом табло. Процесс вывода может быть остановлен путем подачи оператором сигнала Стоп вывода. В этом положении путем подачи сигналов Вправо или Влево можно перемещать перо графопостроителя в соответствующем направлении. При этом изменяется номер выводимой точки.
В устройстве интегрирования в цифровом виде вычисляется интеграл от яркости по выводимой строке. Полученные при этом значения непрерывно отображаются на цифровом табло. Остановив вывод информации, процесс интегрирования можно начать сначала подачей сигнала Сброс интегратора.
Обмен информацией между системой хранения информации мини-ЭВМ производится на внепроцессорном уровне блоками слов. Размер блока, адрес первого слова и начальный адрес назначения
задаются по командам ЭВМ. |
55 |
|
|
Блок сопряжения оптического многоканального анализатора с мини-ЭВМ (рис. 1.16) содержит |
|
дешифратор адреса ДША, четыре адресуемых регистра (регистр команд и состояний РКС, счетчик адреса обмена САО, счетчик адреса передачи САП, счетчик слов СС) и схему управления и синхронизации СУС. Дешифратор адреса определяет, к какому из адресуемых регистров идет обращение.
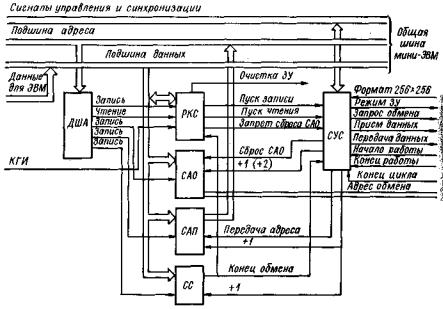
Рис. 1.16. Структурная схема блока сопряжения Процесс приема данных из ЭВМ или передачи данных в ЭВМ начинается после записи «1» в
соответствующий разряд регистра команд и состояний. До начала обмена задаются начальный адрес ЗУ, начальный адрес назначения и число слов путем установки соответственно счетчиков адреса обмена LAU, адреса передачи САП и слов СС. После приема или передачи одного слова содержимое САП и СС увеличивается на 1, а содержимое САО на 1 при форматах 512 х 512 х 512 X 256 точек и на 2 при формате 256 X 256 точек.
После переполнения счетчика слов обмен прекращается.
Регистр команд и состояний кроме разрядов Пуск записи и Пуск чтения содержит разряды
Готовность, Наличие информации, Обмен не завершен, Запрет сброса САО, Очистка памяти. При установке в единичное состояние разряда Готовность оптический многоканальный анализатор готов к обмену данными с мини-ЭВМ. При приеме информации от АЦП (см. рис. 1.13) разряд Готовность устанавливается в нулевое состояние, а по окончании приема возвращается в единичное состояние. Установка в единичное состояние разряда Наличие информации говорит о том, что в ЗУ содержатся результаты эксперимента. Если прием информации от АЦП начинается до завершения обмена с мини-ЭВМ, обмен прекращается и устанавливается в единичное состояние разряда Обмен не завершен. При записи 1 в разряд Запрет сброса САО запрещается установка в нулевое состояние счетчика адреса обмена по началу
приема информации от АЦП. Это дает возможность начинать запись результатов эксперимента с любого
57
адреса ЗУ, заданного предварительной установкой САО. Если разряд Запрет сброса САО находится в нулевом состоянии, то с началом приема информации от АЦП счетчик адреса обмена устанавливается в нулевое состояние. При записи 1 в рязряд Очистка памяти производится запись нулей во все ячейки ЗУ, что облегчает использование ОМА в качестве полутонового дисплея.
Схема управления и синхронизации СУС после записи 1 в разряды РКС Пуск записи или Пуск чтения устанавливает запрос прямого доступа и, получив право на управление общей шиной, осуществляет непосредственное управление циклами обмена данными между ЗУ и мини-ЭВМ.
Для обеспечения гибкости и оперативности с учетом того, что ОМА функционирует в реальном масштабе времени, программное обеспечение (ПО) построено по модульному принципу.
Программное обеспечение ОМА включает набор программных модулей, использующих язык Фортран-IV. Управляющие подпрограммы для обмена информацией между ЭВМ и аппаратной частью ОМА написаны с использованием языка Ассемблер. Входящий в состав программного обеспечения модуль диалогового режима позволяет оперативно адаптировать систему в целом и характер проводимой обработки к условиям конкретного эксперимента. Кроме того, разработаны диагностические программные модули для проверки сопряжения аппаратной части с ЭВМ, контроля ОЗУ и непосредственно программ математического обеспечения системы.
Разработка мощного программного обеспечения является одной из основных проблем построения развитых СТЗ. Эту проблему невозможно решить без развития аналитического аппарата анализа изображений и распознавания образов. Для того чтобы СТЗ стали широко применяться в реальных условиях производства, необходимо в первую очередь обеспечить их высокие эксплуатационные характеристики.
Многообразие решаемых СТЗ задач и условий их функционирования требует блочно-модульной компоновки таких систем. Например, СТЗ должна обеспечивать возможность подключения нескольких
телекамер различных типов (с электронно-лучевой трубкой или оптоэлектронными чувствительными
58
элементами). В качестве датчиков изображения в настоящее время все чаще используют ПЗС-камеры, которые по сравнению с обычными телекамерами обладают существенно большим сроком службы и
удобством сопряжения с вычислительной системой.
Принцип модульности целесообразно применять и при проектировании систем предварительной обработки, основные операции которых (квантование видеосигналов, фрагментация изображения, кодирование и т. д.) могут быть формализованы. Математическое обеспечение СТЗ также следует строить по модульному принципу.
Таким образом, для создания высокоэффективных СТЗ необходимо объединить совместные усилия разработчиков аппаратуры, алгоритмического и программного обеспечения, а также специалистов в области создания информационных систем.
1.4. Особенности алгоритмов преобразования информации в системах технического зрения При анализе алгоритмов обработки информации в СТЗ необходимо прежде всего выделить
следующие две основные особенности, определяющие выбор тех или иных алгоритмов в условиях
современного промышленного производства [24]. 59
1.Высокая степень детерминированности распознаваемых промышленных объектов. Действительно,
вполе зрения СТЗ, как правило, находятся детали с определенными характеристиками, изменяющимися незначительно по сравнению с такими областями, как анализ документов, криминалистика, медицинская диагностика, прогноз погоды и т. п. Наличие такой детерминированности существенно упрощает алгоритмы обработки изображений.
2.Необходимость функционирования в реальном масштабе времени в условиях постоянно изменяющейся рабочей обстановки (например, обработки зрительной информации о расположении деталей на движущемся конвейере) с учетом необходимости ее преобразования. Работа в реальном масштабе времени налагает существенные ограничения на время обработки информации и, следовательно, на ее объем.
В работе [25] сформулированы основные требования к СТЗ:
1)быстродействие алгоритмов СТЗ должно быть достаточным для обработки информации в реальном маштабе времени; на обработку данных от одной детали следует затрачивать не более 200 мс;
2)необходимо предусмотреть контроль на соответствие эталону деталей, положение которых нефиксировано, с учетом возможных перемещений (со скростью не менее 1 м/мин);
3)алгоритмы обработки должны носить универсальный характер, что позволит выработать общий подход к их разработке и реализации (по-видимому, математическая теория преобразования зрительной
информации в роботах должна составить относительно самостоятельный |
раздел теории обработки |
|
изображений; |
это сделает возможным применение алгоритмов СТЗ |
при решении широкого круга |
производственных задач); |
|
|
4) алгоритмы СТЗ должны допускать простое внесение изменений |
в их работу; необходимость |
|
этого связана, |
во-первых, с потребностями модернизации производства и, во-вторых, с тем, что любой |
|
робот является многоцелевой системой и может применяться на различных участках технологического
процесса; |
60 |
5)качество получаемых изображений должно быть достаточно высоким и допускать точные измерения; разрешающая способность СТЗ должна регулироваться на разных этапах обработки;
6)СТЗ должна быть нечувствительной к помехам и изменению освещенности, которую очень трудно поддерживать на постоянном уровне (особенно в условиях перемещения объектов);
7) |
СТЗ должна |
иметь стандартные средства сопряжения со специализированными |
или |
общеупотребительными |
микроЭВМ; |
|
|
8) |
СТЗ должна иметь небольшие размеры, малую массу и невысокую стоимость. |
|
|
В настоящее время общий подход к разработке алгоритмов функционирования СТЗ только начинает формироваться, хотя уже известно большое число конкретных систем, в которых реализованы частные алгоритмы. Одной из важнейших задач современной техники является систематизация этих алгоритмов и завершение на их основе формирования общего подхода.
Процесс функционирования СТЗ принято разделять |
на следующие основные этапы [25]: |
формирование изображения, его сегментацию, описание, |
анализ с распознаванием образов и |
интерпретацией сцен. |
|
Поскольку алгоритмы обработки зрительной информации в ее полном объеме сложны, а следовательно, требуют большого объема памяти и времени, при создании СТЗ и разработке ее алгоритмов следует по возможности уменьшать объем вводимых данных. В некоторых случаях изображение можно полностью идентифицировать с помощью нескольких характерных точек. Иногда достаточно отследить его контур, определить центры отверстий, если они имеются и т. д. Однако, такой
подход вынуждает довольно точно учитывать конкретную специфику деталей, что опять же означает разработку конкретной системы, а не создание общего подхода. Основные приемы сокращения информации
на входе следующие [25]: |
61 |
1) замена объемного изображения плоским (возможна, если детали располагаются на плоскости, касаясь ее определенной поверхностью);
2) переход к бинарному изображению, не учитывающему градаций освещенности (такое изображение позволяет отследить контуры и общие очертания предметов);
3) сочетание датчиков СТЗ с другими средствами очувствления, уточняющими получаемую информацию;
4)получение изображений одного и того же предмета или группы предметов с различных точек наблюдения;
5)специальное освещение объектов, позволяющее устранить тени и перейти к бинарному изображению.
Следует отметить, что перечисленные упрощения не всегда возможны. Например, в некоторых случаях необходимо работать с объемным изображением, которое фиксируется с помощью различных дальномерных систем (радиолокационных, ультразвуковых, лазерных и т. д.).
Рис. 1.17 иллюстрирует принцип работы промышленной СТЗ [26].
Телекамера
62
Алгоритмы обработки зрительной информации
Алгоритмы планирования и управления движением
Исполнительный орган
Рис. 1.17. Принцип работы промышленной СТЗ На современном этапе развития робототехнических систем для реализации алгоритмов обработки
зрительной информации применяются универсальные ЦВМ (см. рис. 1.17). Дальнейшее усовершенствование СТЗ должно привести к созданию специализированных устройств, реализующих аппаратно некоторые стандартные этапы обработки и допускающих распараллеливание вычислений [25].
Можно указать два основных способа использования зрительной информации. Первый заключается в том, что анализ этой информации и управление движением исполнительного механизма разделены во времени, т. е. во время работы используется информация, полученная накануне, сама же работа производится вслепую. Второй способ предполагает постоянную корректировку перемещения исполнительного механизма под действием изменения визуальной информации. Ограниченное быстродействие ЦВМ не позволяет в настоящее время эффективно использовать второй способ, поскольку объем обрабатываемой информации в этом случае существенно возрастает.
Наиболее полная систематизация алгоритмов машинного зрения роботов представлена в работе [25]. В дальнейшем мы будем придерживаться этой классификации при рассмотрении особенностей обработки вводимой визуальной информации в СТЗ. Структурная схема процесса обработки изображения СТЗ представлена на рис. 1.18 [25].
63
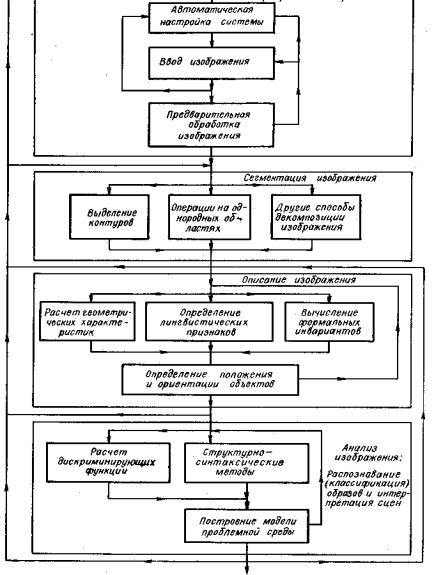
Рис. 1.18. Структурная схема процесса обработки изображения в СТЗ Рассмотрим алгоритмы функционирования СТЗ на различных этапах. Этап формирования
изображения включает в себя автоматическую настройку системы, ввод изображения и его предварительную обработку (рис. 1.18). Под настройкой системы принято понимать наведение камеры или другого чувствительного элемента, выбор поля зрения, фокусировку, наведение контрастности, установку требуемой яркости, подбор условий освещенности и т. п.
Для формирования изображения необходимо ввести на плоской проекции визируемого пространства
65
систему координат (чаще всего декартовых) и каждой точке поставить в соответствие число f, задающее уровень ее освещенности. Таким образом, изображение характеризуется функцией двух переменных S, (х, у), заданной на визируемой проекции, которую будем называть функцией яркости. Функция S (х, у) характеризует изображение в полном его объеме.
Телевизионная камера и стандартные специальные устройства (АЦП и компараторы) представляют изображение в памяти ЭВМ в виде матрицы f (i, j), i — 1, 2, ..., m, j = 1, 2, ..., n, заданной на дискретной пространственной решетке. Это означает, что поле зрения разбивается по осям х и у соответственно на m и n отрезков длины А. При этом f (i, j) можно положить равным среднему значению функции S (х, у) в соответствующем квадрате (ячейке). В дальнейшем значение f (х, у) квантуется. В итоге можно считать, что функция f (i, j) принимает целые значения F (i, j) = k при Mк-1≤f (i, j) < Mk, k — 1, 2, ..., l, где Mk — значение k -го порогового уровня. При l=1 изображение F (i, j) называется бинарным, при l > 1 — полутоновым.
Необходимость преобразования S (х, у)→F (i, j) вызвана следующими обстоятельствами [26]: разбиение поля зрения на ячейки обусловлено конечностью памяти ЭВМ; квантование значений f (i, j) необходимо вследствие ограниченности разрядной сетки ЭВМ и технических особенностей устройств преобразования (АЦП); число градаций яркости в современных лабораторных СТЗ достигает 256.
При переходе от S (х, у) к F (i, j) неизбежна некоторая потеря информации, которую можно уменьшить путем неравномерного разбиения визируемой области.
Сначала область разбивается на мелкие ячейки. Затем к полученному двумерному массивуF(i, j) очень
66
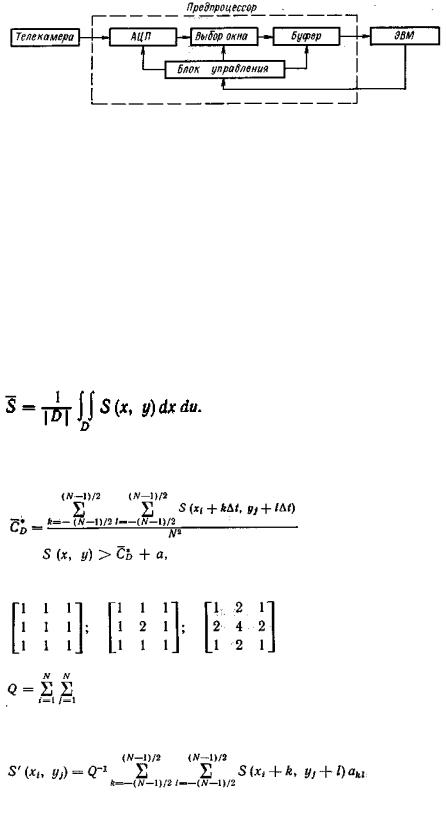
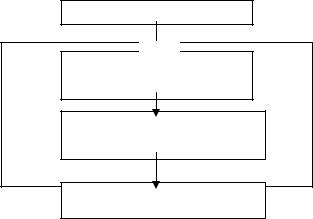
большой размерности применяются алгоритмы упаковки, приводящие к неравномерному разбиению. Преобразование S (x, у)→ F (i, j) выполняется на этапе ввода изображения обычно с помощью некоторого промежуточного устройства — предпроцессора (рис. 1.19) [17].
Рис. 1.19. Стуктурная схема предпроцессора ввода и формирования изображения Исходная информация (видеосигнал) поступает на АЦП, где она квантуется. Далее через устройство
выбора окна информация поступает в буфер, который служит для промежуточной записи и согласования скоростей работы АЦП и передачи данных в ЭВМ. Устройство выбора окна определяет ячейку (часть изображения),
информация о которой преобразуется и записывается в память ЭВМ. Записанную в памяти ЭВМ функцию F (i, j), которую также как и S (х, у) будем называть функцией яркости, в дальнейшем можно обрабатывать программными средствами. Следует иметь в виду, что на процесс ввода и формирования изображения оказывают влияние помехи. Задача предварительной обработки — устранение искажений, вносимых помехами на разных стадиях формирования, т. е. восстановление истинных значений функции яркости S (х, у) в заданных точках.
Перечислим основные методы фильтрации изображений, применяемые в СТЗ адаптивных роботов
[26].
1. С помощью порогового метода ликвидируются пики освещенности, т. е. изображение сглаживается. Суть метода заключается в том, что каждая точка с координатами х = хi = х0 + iΔt и у = yi = y0 + jΔt рассматривается в совокупности с некоторыми ее соседними точками, т. е. помещается в центр некоторой области D заданной конфигурации. Находится среднее значение яркости на этой области
67 |
(1.15) |
|
где |D| —площадь |
области D. На практике область |
D обычно имеет вид квадрата, т. е. задается |
||||
|
|
|
|
|
||
целое нечетное число N (обычно N=3,5 или 7). Тогда оценкой величины S является |
||||||
|
|
(1.16) |
|
|
|
|
|
|
|
||||
Если |
где а — заданное пороговое |
значение, заменяем его на |
С |
D* |
||
2. Метод анизотропной и рекуррентной фильтрации состоит в следующем. Задается сглаживающая матрица размерности NxN. Например, если N = 3, обычно используются матрицы [27]:
Обозначим сумму всех чисел этой матрицы.
Исходное изображение задано освещенностью S(xi , yi) в точках xi , yi , i, j = 0, 1,..., M - 1. Полагаем М >>N. Каждую точку xi , yj окружаем соседними точками точно так же, как это делалось при рассмотрении порогового метода. Исходное значение S (xi , yi ) заменяем новым
68 |
(1.17) |
|
где аkl - элемент сглаживающей матрицы (k, l = 1, 2, ..., N). Если значения S/ (xi , уj) формируются в памяти ЭВМ, образуя отдельный массив, не совпадающий с массивом элементов S (xi , yi) получаем анизотропную фильтрацию. Если же новые значения S/ (xi , УJ) в процессе их вычисления заносятся в те же ячейки памяти, где ранее находились значения S (xi , yj), получаем рекурентную фильтрацию. Таким образом, при вычислении S/ (xi , уj) методом рекурентной фильтрации могут использоваться как исходные, так и вновь вычисленные значения освещенности. По сравнению с анизотропной фильтрацией последний метод оказывается более предпочтительным, так как позволяет экономить память ЭВМ.