

2444
.pdf1.2. Общие принципы функционирования систем технического зрения. Обобщенная функциональная схема СТЗ приведена на рис. 1.1.
Рис. 1.1. Общая функциональная схема СТЗ
Изображение объекта через оптический блок передается на преобразователь свет-сигнал (обычно матричный), электрический сигнал которого в устройстве первичной обработки изображения усиливается и запоминается. Устройство анализа изображения (вторичной обработки) служит для выделения и опознавания объекта, определения его координат и положения. При необходимости обработанная информация об объекте высвечивается на устройстве визуального контроля. На основе полученной информации контроллер связи с исполнительным механизмом
вырабатывает управляющие сигналы, приводящие в действие исполнительные механизмы, осуществляющие целенаправленное воздействие на объект.
Чувствительным элементом в рассмотренной схеме является оптический блок с преобразователем свет-сигнал. Обычно он реализуется с помощью телекамеры. Существуют варианты СТЗ с различной разрешающей способностью (64-256) и уровнями квантования видеосигнала (1-256).
В настоящее время выделяют несколько поколений СТЗ [3, 4, 5, 6, 7]. Системы первого поколения оснащены микроЭВМ и телекамерой и работают по бинарному принципу, т. е. представляют все точки визируемой
зоны как светлые и темные. Такое представление налагает жесткие требования на условия освещения
19
объекта, поскольку изображение должно быть контрастным. Системы второго поколения способны анализировать уровни освещенности, т. е. правильно определять границы деталей и некоторые существенные особенности. При этом объем информации, поступающей на обработку, существенно возрастает, что приводит к увеличению времени обработки. Однако за счет развития и удешевления технологической базы робототехники уже в ближайшее время ожидается построение промышленных СТЗ с уровнем квантования видеосигнала 256 и разрешением 1024 X 1024 элемента. В настоящее время в СТЗ используют телекамеры с черно-белым изображением. Удешевление цветных камер позволит использовать их в СТЗ, что приведет к повышению информативности изображения и в ряде случаев упростит обработку и уменьшит ее время.
Назначение устройства первичной обработки состоит в уменьшении общего времени обработки изображения. При этом в большинстве случаев осуществляется фиксация и представление изображения в виде характерных точек (определение центра объекта, нахождение его важных характерных особенностей: углов, расстояний от центра до края и т. д.). Таким образом, на первом этапе осуществляется непосредственная обработка и представление информации в виде, удобном для дальнейших стандартных преобразований, которые обычно выполняют на универсальной ЭВМ. Сама же предварительная обработка учитывает специфику объекта, поэтому устройство первичной обработки, как правило, является специализированным, реализующим требуемые алгоритмы. Наличие в современных СТЗ устройства первичной обработки обусловлено требованиями высокой скорости обработки данных (не более 150 мс на изображение), технологической гибкости и высокой разрешающей способности. Отсутствие этого устройства в системе увеличивает общее время обработки. Например, в системе, построенной фирмой «Дженерал Моторс» (General Motors) на базе ЭВМ IBM 370/688, анализ ситуации занимает 31 с при использовании матрицы 512 X 512 и 16 уровней яркости.
Устройство вторичной обработки осуществляет распознавание изображения, т. е. по его характерным признакам определяет, к какому классу принадлежит визируемый объект. На вход устройства поступает код изображения, полученный на этапе первичной обработки. На выходе образуются управляющие команды,
20
преобразуемые в дальнейшем контроллером связи в сигналы, определяющие перемещения и действия манипулятора. Процесс удешевления аппаратуры позволил для вторичной обработки использовать микропроцессоры, а также мини- и микро-ЭВМ. Для обучения роботов и наблюдения за рабочей ситуацией иногда в СТЗ вводят устройство визуального контроля.
Задачи, решаемые в СТЗ, существенно зависят от степени детерминированности рабочей среды. С учетом этого важнейшего фактора имеющиеся СТЗ принято делить на три класса сложности:
1) простейшие СТЗ, работающие в полностью детерминированной среде и использующиеся для проверки наличия деталей, обнаружения чужеродных объектов, простейших измерений; они позволяют оперативно определять отклонения, выводящие техническую систему из нормального режима работы;
2)СТЗ, работающие в условиях, когда положение или внешний вид объектов не являются вполне определенными; такие ситуации характерны для СТЗ, управляющих сортировкой и распознаванием деталей;
3)СТЗ, работающие в условиях неопределенности формы и положения объектов (наиболее сложные) и решающие задачи извлечения деталей из бункеров, контроля деталей, установки интегральных схем и т. п.
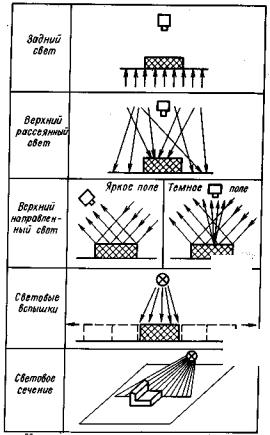
Методы получения изображения в СТЗ прежде всего определяются типом освещения и делятся на теневые и отраженные [6]. Более детально методы освещения представлены на рис. 1.2.
Различные приемы освещения применяются в стационарном и стробирующем
21
режимах (световые вспышки). Стробирующий режим используют для анализа изображения движущегося объекта, стационарное наблюдение в этом случае дает размытое изображение. Освещение с помощью заднего света позволяет получить лишь силуэт объекта и, следовательно, пригодно только для анализа бинарных изображений. Верхнее освещение может быть рассеянным или направленным. Источник рассеянного света обеспечивает однородное отражение и, таким образом, более подходит для решения задачи сегментации (т. е. разделения изображения на однородные области). Для задач проверки (таких, как измерение шероховатости поверхности детали) следует использовать направленное освещение. В этом случае яркое поле наблюдения соответствует прямо отраженному свету. Если же на поверхности имеются неоднородности (например, царапины), то часть светового потока отражается в другую сторону, образуя темное поле наблюдения.
22
21
Рис. 1.2. Методы освещения объектов Техника светового сечения предназначена для анализа трехмерного изображения и в настоящее время
почти не используется в промышленности.
Отраженные методы предполагают, что на чувствительный элемент поступает отраженный от визируемого объекта свет. Очевидно, для группы методов, использующих задний свет, гораздо меньшее значение имеет качество освещения, в то время как использование отраженных методов приводит к появлению бликов на изображении. На рис. 1.3 представлена зависимость пороговых уровней качественного
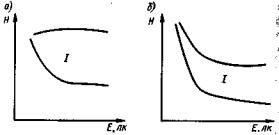
изображения от освещенности Е для обоих методов.
Рис. 1.3. Зависимость пороговых уровней Н теневого (а) и отраженного (б) методов от освещенности (I — зона качественного изображения)
Как видно из предыдущего, проблема освещенности имеет большое значение при разработке СТЗ. Подробно все основные задачи, связанные с этой проблемой, рассмотрены в работе [10]. Их можно разделить на два класса: оптические проблемы и проблемы взаимодействия с внешней средой. Оптические проблемы связаны с взаимодействием источника света и чувствительного элемента. СТЗ работают с различными объектами, среди которых есть прозрачные и непрозрачные. Поэтому, с одной стороны, уровень освещенности должен быть достаточно высоким, а с другой стороны, при сильной освещенности может возникнуть эффект насыщения чувствительного элемента. Очень важным моментом является борьба с ложными отражениями (бликами) от поверхностей объектов. Следует учитывать, что форма объектов также порождает некоторые проблемы. Искривленные поверхности могут отражать свет, как выпуклое или вогнутое зеркало. Эти «квазизеркала» увеличивают погрешности оптической системы.
К проблемам взаимодействия СТЗ с внешней средой относятся выбор фоновых поверхностей, исключение влияния вибрации оборудования, вызывающей флуктуацию уровней и направления освещения, а также проблема перемещения объектов, предполагающая использование быстрого сканирования и учет обусловленных им погрешностей. Однозначного решения этих проблем не существует. Каждое частное решение требует оценки реальных условий функционирования системы.
В первых СТЗ в качестве преобразователя свет-сигнал использовались передающие электронно-
лучевые трубки (ЭЛТ), что создало большие технические трудности, особенно по стабилизации точностных
24
параметров систем. Новый класс преобразователей — интегральные фотоприемные устройства (ИФУ) — матричные и линейные — характеризуются повышенной надежностью и малыми габаритными размерами чувствительных элементов, что позволяет устанавливать эти приборы непосредственно на схвате манипулятора. Кроме того, точность измерений с помощью ИФУ намного выше соответствующих показателей с ЭЛТ. Наиболее перспективно при разработке чувствительных элементов использовать различные варианты приборов с зарядовой связью (ПЗС). Следует отметить и некоторые недостатки ИФУ: неоднородность чувствительности, размывание изображений, большую силу темнового тока, ведущую к ограничению времени накопления и динамического диапазона приборов [6]. Однако эти недостатки практически устранены в некоторых приборах. Принципиальными недостатками можно считать низкие радиационную стойкость и термостойкость.
Назначение СТЗ во многом определяет характер оптической информации, вводимой в ЭВМ. В систематизированном виде можно выделить три основные группы оптической информации: 1) двоичную оптическую информацию; 2) информацию, характеризующую пространственные и угловые координаты изображений; 3) полутоновые оптические изображения.
Системы технического зрения, осуществляющие ввод в ЭВМ двоичной информации, в перспективе должны полностью заменить низкоскоростные механические устройства считывания информации с перфокарт, перфолент, рабочих чертежей и т. д. При этом решается задача существенного повышения суммарного быстродействия ЭВМ за счет использования параллельной обработки больших массивов данных, предварительно преобразованных с помощью управляемых оптических транспарантов в оптический изображения. Регистрация изображений осуществляется на фото термопластическом носителе с характерной плотностью записи информации 105 бит/см2 при поточечном методе и 105—107 бит/см2 при голографическом методе [4]. Эти значения намного превышают плотность записи информации в накопителе на магнитной ленте (102—103 бит/см225). Современные линейные и матричные фотоприемники на ПЗС позволяют считывать информацию с носителя при плотностях записи (l÷2) 106 бит/см2. Рассмотренный подход позволяет успешно решать задачи автоматического перевода стилизованной информации, а также печатной информации на язык ЭВМ.
Оптическая информация, характеризующая пространственные и угловые координаты изображений, при обработке требует измерения положения элемента в плоскости многоэлементного фотоприемного устройства. В зависимости от вида представления изображения в ЭВМ (в бинарном коде или с сохранением информации о распределении интенсивности освещенности изображения от точки к точке) измерение положения элемента изображения может осуществляться путем выбора адреса фотоприемной ячейки или информационным способом [4]. Если объект представлен в виде пятна, выбор адреса фотоприемной ячейки
сводится к определению координат границ пятна  и вычислению координат центра пятна:
и вычислению координат центра пятна:
 . (1.13)
. (1.13)
Информационный способ состоит в вычислении центроиды светового пятна по обеим осям:
(1.14)
где I (x), I (у) — функции распределения интенсивности изображения пятна вдоль осей х и у; xi, yi — дискретные значения координат центров i-го фоточувствительного элемента.
При помощи стереоскопической системы с двумя разнесенными в пространстве координатными датчиками можно определить расстояние от базовой точки до освещенного объекта h=FL/δ, где F — фокусное расстояние объективов датчика; L — расстояние между параллельными осями объективов; δ — расстояние между координатами двух изображений в двух датчиках.
Построенные таким образом стереоскопические системы могут (в зависимости от параметров F и L) иметь разрешимую дальность от нескольких сантиметров до нескольких километров. Способность стереоскопических датчиков фиксировать пространственную конфигурацию наблюдаемых объектов позволяет использовать их для автоматизации сборочных операций изделий электронной техники, чтения рабочих чертежей, логических и монтажных схем, сортировки изделий по их форме и пространственной ориентации, выявления бракованных по внешнему виду изделий и т. д.
Ввод полутоновых изображений в ЭВМ имеет специфические особенности при статической и динамической проекции оптического изображения на светочувствительную поверхность многоэлементного фотоприемного устройства. В первом случае периодическое повторение видеосигнала позволяет реализовать стробоскопический метод измерения выборочных значений сигнала и непосредственный ввод кодов измеренных величин в ЭВМ для последующей обработки. При работе в динамическом режиме повторяемость одинаковых реализаций видеосигнала отсутствует, дискретизация и кодирование видеосигнала осуществляется, как правило, на достаточно высоких частотах, не позволяющих выполнять непосредственный ввод кодов выборочных значений в ЭВМ. При реализации этого режима обычно используют быстродействующее буферное ОЗУ, которое позволяет записывать кодируемую информацию в реальном масштабе времени и далее с приемлемой скоростью направлять ее в ЭВМ. Для запоминания одного кадра информации матричного фотоприемника с числом элементов 105 при восьмиразрядном квантовании выборочных значений видеосигнала требуется буферное ОЗУ с емкостью около 106 бит. Существенно отметить также необходимость использования на стыке между фотоприемником и буферным ОЗУ быстродействующего аналого-цифрового преобразователя (АЦП) с временем преобразования одной выборки менее 1 мкс. Требования по быстродействию АЦП можно уменьшить, если для считывания информации использовать несколько АЦП с циклическим режимом работы.
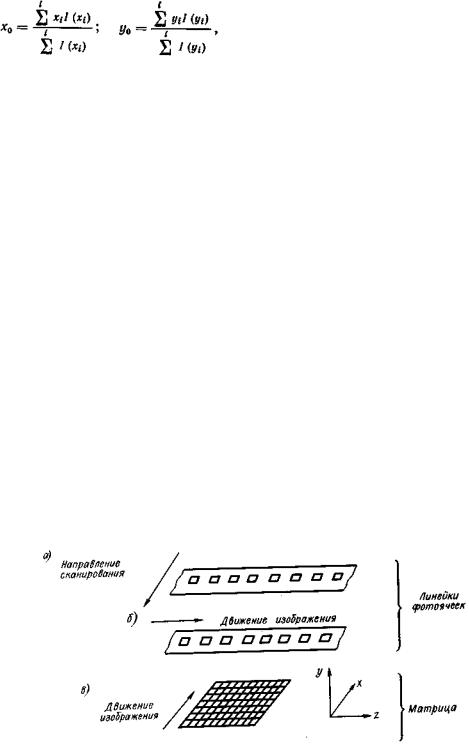
Основные способы сканирования изображения объекта приведены на рис. 1.4, а—в. При
параллельном сканировании (рис. 1.4, а) при помощи вращающейся оптической призмы (или зеркала)
27
обеспечивается параллельное сканирование изображения
Рис. 1.4. Основные способы сканирования изображения объектов: параллельный (а), последовательный (б), последовательно-параллельный (в)
объекта поперек строки чувствительных элементов фотоприемника. Если интенсивность падающего на элементарную фотоячейку светового потока равна Н, время накопления заряда в каждой фотоячейке — Т, а скорость сканирования изображения поперек строки — v, то для сканируемого участка объекта с протяженностью d ~ vT на выходе фотоячейки появляется сигнал S ~ НТ. Это означает, что любая попытка
увеличить по направлению сканирования геометрическое разрешение, обратно пропорциональное значению
28
d, за счет уменьшения времени накопления заряда Т приводит к уменьшению выходного сигнала фотоприемника. И, наоборот, увеличить выходной сигнал можно за счет снижения разрешающей

способности. Целый ряд существенных преимуществ линейной организации фотоприемников (высокая плотность размещения элементов при их достаточно большом количестве и относительно небольшая активная площадь) позволяет достичь высокого пространственного разрешения вдоль оси фоточувствительной ячейки и получать изображения, содержащие несколько миллионов разрешаемых точек.
В наиболее совершенном виде последовательное сканирование реализовано в виде режима временной задержки и накопления (рис. 1.4, б). При помощи оптической развертки обеспечивается растровое сканирование поля зрения — движение изображения объекта вдоль линейки чувствительных элементов. Синхронно с движением соответствующей точки изображения осуществляется перенос зарядового пакета из одной фотоячейки в другую, в результате чего эффективный суммарный заряд на выходе фоточувствительной цепочки с числом элементов М будет в М раз больше, чем сигнал одного элемента. Так
как в процессе переноса заряда шум накапливается пропорционально 
 М , результирующее отношение
М , результирующее отношение
сигнал/шум увеличивается в 
 М раз.
М раз.
Аналогичный результат имеет место и для другой организации линейки фотоприемника, когда заряды не переносятся из ячейки в ячейку, а последовательно считываются в накопительное устройство и затем суммируются. Таким образом, по сравнению с параллельным последовательное сканирование изображения, дополненное временной задержкой и накоплением сигнала, увеличивает время экспозиции в М раз без потери геометрического разрешения и уменьшения скорости поступления информации. Рассмотренный механизм усреднения выходного сигнала фотоприемника обеспечивает также более высокую однородность изображения. Отмеченные достоинства особенно существенно использовать при малом уровне
освещенности и необходимости обеспечения достаточно высокого геометрического разрешения.
29
При последовательно-параллельном сканировании изображений объекта (рис. 1.4, в) используется матрица фоточувствительных элементов размером N X М, что позволяет одновременно фиксировать N точек
изображения объекта (N — число фотоячеек в направлении, перпендикулярном к направлению
сканирования) |
и усреднять по каждой из этих точек М последовательно (синхронно |
с разверткой) |
||
получаемых |
результатов |
измерений (М — число фотоячеек |
в направлении |
сканирования). |
Следовательно, |
при последовательно-параллельном сканировании |
объединяются |
преимущества |
|
первых двух способов сканирования. На практике наиболее часто используют относительное перемещение приемника над объектом и наоборот. В таких условиях, например, работают видеосистемы, установленные для просмотра плоскости деталей на движущейся конвейерной линии. Однако во многих случаях плоскость объекта просматривается видеосистемой с платформы, движущейся относительно объекта с некоторой линейной скоростью. Относительное перемещение объекта и приемника часто используется для
осуществления сканирования и |
формирования поля изображения. Например, |
в |
воздушной разведке |
|||
этот прием известен под названием метода |
«подметания» |
изображения, который |
реализуется |
как с |
||
помощью линейного, так и |
матричного |
фотоприемника. |
При реализации |
параллельного |
метода |
|
сканирования фоточувствительная линейка размещается перпендикулярно к направлению движения, и изображение объекта, формируемое видеосистемой, будет состоять из ряда полос. В аналогичной ситуации
при использовании матричного фотоприемника |
имеет место |
последовательно-параллельный способ |
|||
сканирования. Здесь для создания эффективного режима |
накопления сигнала важно обеспечить |
||||
равенство средней скорости продвижения электрического включения |
фотоячеек |
(скорости переноса |
|||
или считывания накопленного в ячейках заряда) в направлении |
сканирования и |
скорости |
движения |
||
точек объекта в плоскости изображения. |
|
|
|
|
|
В одномерной (линейной) фотодиодной |
или фототранзисторной |
структуре |
адресная |
выборка |
|
реализуется при помощи кольцевого счетчика или адресного дешифратора. При использовании кольцевого счетчика (режим «самосканирования») адрес опрашиваемой ячейки задается «единицей», перемещающейся по динамическому регистру сдвига, а при использовании адресного дешифратора адрес ячейки генерируется отдельным счетчиком. Для линейных приемников изображения на ПЗС характерна самосканирующая схема адресной выборки. Их отличие от устройств с координатной выборкой состоит в том, что по прибору перемещается не адрес считываемой ячейки, а сам сигнальный заряд. Заряды, накопленные в фотоячейках приемника за определенный промежуток времени, через затвор переноса передаются в считывающий регистр с переносом заряда. Последний считывает информацию путем
сдвига зарядовых пакетов к выходному усилителю с тактовой частотой передачи видеосигнала. На выходе |
|
30 |
импульсов различной амплитуды. При |
усилителя видеосигнал представляет собой последовательность |
|
непрерывном цикле накопления зарядов видеосигнал выводится |
также непрерывно, за исключением |
небольшого временного промежутка переноса пакетов зарядов из фотоячеек в регистр сдвига. В случае билинейной организации приемника заряды из каждого чередующегося рода фоточувствительных элементов переносятся в отдельные считывающие регистры. С выходов регистров заряды поочередно передаются на входы общего усилителя считывания. Для этого соответствующим образом подбираются фазовые соотношения серий тактовых импульсов, питающих двухфазные или трехфазные регистры считывания.
В двумерных координатных фотоприемниках используются словарная (параллельная или последовательная) и поэлементная выборки информации, при этом адресация фотоячеек осуществляется
сдвиговыми регистрами или декодером. Параллельная словарная адресация характерна для сдвиговых регистров. Накопление информационных зарядов осуществляется в фотоячейках четных (нечетных) строк. Фазы переключаются каждый раз после завершения считывания полукадров, которое в свою очередь реализуется в результате переноса пакетов зарядов вертикальными сдвиговыми регистрами вниз в горизонтальный сдвиговой регистр и последующего построчного вывода информации с тактовой частотой видеосигнала на выход приемника.
Необходимо отметить принципиальную возможность создания фоточувствительных ПЗС-структур с произвольной и ассоциативной выборками информации. Такую адресацию можно реализовать аналогично тому, как это сделано в функциональных устройствах на ПЗС [9], разработанных для применения в вычислительной технике (запоминающих устройствах с произвольной выборкой по считыванию, многофункциональных и ассоциативных запоминающих устройствах).
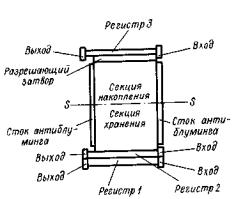
Характер вводимой в ЭВМ информации из многофункциональной фоточувствительной схемы с зарядовой связью существенно отличается по сравнению с базовой схемой, обеспечивающей простое формирование видеосигнала. В частности, при низком уровне освещенности непосредственная подача слабых сигналов во внешние цепи преобразования неизбежно ведет к ухудшению и без того малого отношения сигнал/шум. Необходимые в таких случаях дополнительные цепи обработки сигналов размещаются на одном кристалле с фоточувствительной схемой и формируются в едином технологическом цикле. Если обычную фоточувствительную схему на ПЗС с кадровой организацией дополнить двумя линиями задержки в виде ПЗС-регистров 1-3 и соответствующими цепями управления (рис. 1.5), то можно реализовать достаточно сложные функции: задержку сигнала, преобразование Фурье, z-преобразование, преобразование сигнала в цифровую форму, выборку любого из элементов изображения в строке и в кадре и т. д. [11].
32
Рис. 1.5. Многофункциональная фоточувствительная схема на ПЗС При следующем цикле накопления (во время обратного хода строчной развертки) заряды из секции
хранения построчно выводятся в выходной регистр и далее с тактовой частотой, вдвое превышающей полосу частот видеосигнала, передаются на выходной усилитель заряда. Характерные частоты управляющих тактовых импульсов и переноса заряда между секциями матрицы составляют соответственно 10 МГц и 180 кГц
для ФПЗС-1М и 5 МГц и 50 кГц для ФПЗС-2М [12]. В совмещаемой со стандартной телевизионной аппаратурой матрице на ПЗС число элементов по вертикали должно выбираться исходя из требуемого числа строк в кадре, а по горизонтали — исходя из обеспечения передачи видеосигнала в полосе частот 5 и 2,5 МГц, что соответствует разрешению 400 и 200 телевизионных линий.
При определенной модификации схему приемника можно использовать также и для организации чересстрочного считывания. В модифицированной схеме можно применить дополнительную секцию хранения с емкостью, вдвое меньшей фоточувствительной секции; она используется для записи каждой второй строки, считываемой из основной секции хранения. Когда считывается первый полукадр изображения, все нечетные строки 33последовательно выводятся из основной секции хранения при помощи первого сдвигового регистра, затем из дополнительной секции хранения при помощи второго сдвигового регистра выводятся все четные строки второго полукадра. Сложность организации чересстрочного считывания в таком приемнике очевидна. В матрице со строчно-кадровой организацией чересстрочное считывание изображения обеспечивается более легким способом: для каждого двухзатворного элемента регистра в чувствительной области отведены две фотоячейки, в результате чего формируется «четнонечетная» строчная структура приемника. При двухфазной схеме питания регистров на ПЗС фаза 1 (2) служит для переноса зарядов из фотоячеек нечетных (четных) строк под первые (вторые) электроды матриц относительно небольшого объема, используемых для слежения за изображением. Наиболее распространенным, однако, является способ, при котором параллельная информация в выходном регистре
преобразуется в последовательную. |
Для этого применяют два сдвиговых регистра, обеспечивающие |
|||
последовательную выборку |
строк |
и столбцов: по команде с регистра сканирования строки выбирается |
||
нужная (или |
очередная |
в режиме самосканирования) |
строка, после чего при помощи регистра |
|
сканирования |
столбцов выполняется |
поэлементная адресация |
вдоль этой строки. После выбора новой |
|
строки процедура поэлементного опроса повторяется. Для совместимости с существующими телевизионными системами реализуется чересстрочное считывание.
В видеосистемах, использующих телевизионные стандарты Европы и США, покадровая выборка изображений осуществляется с частотой 25 и 30 Гц соответственно. Фактически в фотоячейках заряд накапливается в течение временного промежутка полукадра (1/50 или 1/60 с), после чего полукадр считывается с одновременным накоплением второго полукадра. Типовые фотодиодно-МОП-транзисторные схемы серии МФ с координатной выборкой (матрицы типа МФ6 емкостью 256 бит, МФ14 емкостью 1024 бит и др.), хорошо зарекомендовавшие себя в разработках оптических информационных систем промышленных роботов и робототехнических комплексов, имеют время считывания и время стирания информации из ячейки в пределах 0,2-1 мкс, а время хранения информации не менее 200 мкс. Системы считывания информации из этих матриц, имеющие словарную организацию, обеспечивают выход видеосигнала с частотой 1-2 МГц [8].
Матрицы с координатной адресацией имеют характерный пространственно неоднородный геометрический шум в виде большого числа полос изображения, который обусловлен разбросом параметров цепей управления, дефектами фотолитографического процесса при изготовлении матрицы и другими
причинами. Кроме того, с увеличением объема этих матриц недопустимо большой может |
оказаться |
|||
емкость |
считывающей |
шины, |
подключенной к входному каскаду видеоусилителя. |
Последнее |
обстоятельство во многом определяет результирующее отношение сигнал/шум. С увеличением емкости возрастает роль теплового шума первого каскада видеоусилителя, что приводит к уменьшению отношения сигнал/шум. Введение в каждую фотоячейку усилительного элемента приводит к появлению существенной неоднородности из-за разброса коэффициентов усиления этих элементов и, следовательно, не может улучшить шумовые характеристики. Перечисленные факторы обусловливают определенные ограничения при использовании матриц с координатной выборкой информации (особенно в условиях малой освещенности).
В классе устройств с координатной выборкой наилучшую гальваническую развязку и наименьший разброс выходных сигналов фотоячеек обеспечивают МДП-фотодиодные структуры и фотоприемники на ПЗИ. Важным свойством фотоматриц на ПЗИ является неразрушающее считывание информации [13], которое позволяет осуществлять различные пространственные преобразования изображения: выбор его отдельных элементов, сложение или вычитание фрагментов, вычитание фона, определение корреляционных взаимосвязей и т. д.
Из трех типов фоточувствительных матриц на ПЗС (с переносом кадра, строчно-кадровой организацией, с временной задержкой и накоплением) устройства первого типа отличаются высокой технологичностью и обеспечивают лучшие значения удельного разрешения и степени интеграции. В этих
устройствах во время прямого хода кадровой развертки происходит накопление фотогенерированных
35
зарядов в секции накопления, во время обратного хода — их параллельный перенос в секцию хранения. Реализуемая в схеме электронного обрамления фотоматрицы на ПЗС предварительная обработка
сигналов получила широкое распространение в системах регистрации движущихся объектов. Сущность алгоритма обнаружения движущихся объектов состоит в осуществлении межкадрового вычитания, за счет которого подавляется стационарная часть изображения и формируется результирующий видеосигнал, содержащий информацию об изменении следующих друг за другом кадров (по амплитуде или координате). Традиционные способы решения этой задачи во внешних по отношению фотоматрицы электронных устройствах приводят к значительным ошибкам, обусловленным искажениями информации во всех звеньях схемы межкадрового вычитания. В отличие от такого решения однокристальная схема межкадрового вычитания (рис. 1.6) позволяет осуществлять все операции в зарядовой форме без промежуточных преобразований в напряжение и с минимальной деградацией сигнала [14].
36
Рис. 1.6. Однокристальная схема межкадрового вычитания В схеме имеется фоточувствительная матрица 2 с кадровым накоплением и буферная аналоговая
память 1 одинакового формата. Перезапись видеосигнала в зарядовой форме осуществляется с помощью входных и выходных сдвиговых регистров на ПЗС, а межкадровая разность получается путем синхронного вывода информации из матрицы и буферной аналоговой памяти на операционный усилитель 3 с двумя входами.
Возможна также организация однокристальной схемы межкадрового вычитания на основе
фоточувствительной матрицы со строчно-кадровой организацией [14]. Основное преимущество строчнокадровой организации приемников движущегося изображения — возможность существенного расширения динамического диапазона воспринимаемых освещенностей при одновременном обеспечении высокой разрешающей способности.
Матрица (рис. 1.7) [14] имеет четыре секции объемом 64 (секция № 1), 32 (№ 2), 16 (№ 3) и 16 (№ 4) строк с автономными шинами тактовых импульсов.
37
Рис.1.7. Многосекционная матрица на ПЗС Сдвиговые регистры секционированной матрицы располагаются вдоль перемещения изображения и
обеспечивают синхронное многократное накопление информационного заряда (режим с временной задержкой и накоплением). Синхронное с движением изображения перемещение заряда осуществляется по направлению к нижнему регистру сдвига, осуществляющему вывод результирующего пакета информационного заряда на выход прибора.
В зависимости от освещенности объекта для накопления заряда используются все секции матрицы, т. е. 128 накопительных элементов, либо часть из них. При увеличении интенсивности в два раза по сравнению с минимально возможной, соответствующей использованию для накопления заряда всех секций матрицы, отключается 1-я секция; в четыре раза — 1-я и 2-я секции; в восемь раз — 1, 2 и 3-я секции. Соответственно накопление заряда осуществляется 64, 32 и 16 элементами в каждом столбце матрицы. Отключение секций выполняется взаимной перекоммутацией первой и третьей фазы тактовых импульсов, в результате чего заряд передвигается в верхний регистр сдвига по направлению, противоположному перемещению изображения. Следовательно, блокируется многократное накопление заряда в этих секциях и их вклад в суммарный выходной заряд. Свет-сигнальная характеристика многосекционной матрицы приведена на рис.
1.8.
38
Рис. 1.8. Свет-сигнальная характеристика многосекционной матрицы (128, 64, 32, 16 — число включенных накопительных элементов).
В задачах исследования быстропротекающих процессов или изучения функционирования быстродействующих механизмов и машин, решаемых при помощи видеосистем, необходимо иметь время экспозиции кадра (как в однокадровом, так и в много-кадровом режимах) намного меньшее, чем это определяется параметрами существующих видиконов и твердотельных многоэлементных фотоприемных устройств всех типов. Такие задачи возникают во многих областях науки и техники: эксперименты в области баллистики, аэро- и газодинамические исследования в ракетной и авиационной технике, взрывные процессы и быстрое горение, диагностика некоторых видов лазерной плазмы, разработка и применение оптических квантовых генераторов и др. Из всех фотоприемников минимальное время экспозиции при работе в кадровом режиме обеспечивают ЭОП.
Современные ЭОП позволяют работать с милли-, микро- и наносекундным временем экспозиции, с частотой съемки от 104 до 6 • 108 кадр/с, числом кадров в серии — до 16 и обеспечивают пикосекундное и субпикосекундное временное разрешение [15, 16, 17, 18]. ЭОП с линейной ждущей разверткой регистрирует
информацию о временном и пространственном распределении интенсивности излучения на входной щели. В частности, при совместном использовании с монохроматором информация на выходном экране ЭОП представляется в виде трехмерного изображения: координата, перпендикулярная к полосам спектрального распределения, соответствует длине волны оптического излучения, координата вдоль полос — времени, третья координата — интенсивность излучения. Временные изменения интенсивности исследуемого излучения на различных спектральных участках отображаются изменениями интенсивности свечения выходного экрана ЭОП вдоль соответствующих полос. При многокадровом режиме внутренняя развертка ЭОП осуществляет также пространственно-временное разнесение кадров на различные участки выходного экрана ЭОП. Высокий уровень автоматизации обработки данных достигается при совместном использовании ЭОП и телевизионной камеры, которая осуществляет фотоэлектрическое сканирование изображения на выходном экране ЭОП и последующий вывод информации на ЭВМ [19, 20].
1.3.Структурная организация систем технического зрения.
Ввидеосистеме на основе видикона [20], структурная схема которой приведена на рис. 1.9, используется цифровой способ управления генераторами строчной и кадровой разверток (ГСР и ГКР) от автономного программного блока (БПУ) или от ЭВМ «Электроника 100-И».
40
Рис. 1.9. Структурная схема видеосистемы на основе видикона (ВМ — видеомагнитофон; 30 — электронный осциллограф; ТМ —телевизионный монитор; ЭОК — электронно-оптическая камера; S — видикон; УС — усилитель видеосигнала; ВВС — блок выделения строки; ПАК — преобразователь амплитуда — код; ГКР и ГСР — генератор кадровой и строчной развертки, соответственно; БПУ — блок программного управления; БС — блок сопряжения КМ — кассетный магнитофон)
Число строк регулируется в пределах от 1 до 625 с шагом, равным 1. Строчные реализации видеосигнала, выделенные для цифровой обработки блоком выбора строки БВС, дискретизируются по времени и квантуются по амплитуде при помощи преобразователя амплитуды в цифровой код ПАК., а полученные коды выборочных значений через блок сопряжения Б С вводятся в ЭВМ. Время преобразования одного отсчета в цифровой код не превышает 2 икс. Предусмотрен просмотр регистрируемого видиконом изображения на телевизионном мониторе, а реализации видеосигнала выбранной строки — на осциллографе. Используется также широкий набор периферийных устройств, необходимых для документирования исходных данных и результатов обработки изображений: «Консул-254», перфоратор ПЛ150, устройство ввода с перфоленты СП-3, кассетный магнитофон КМ и видеомагнитофон ВМ. Рассмотренная видеосистема совместно с электронно-оптической камерой (соединенной с видиконом при помощи волоконно-оптического диска) использовалась для спектральных и кинетических измерений в плазменном эксперименте, в котором изучались стационарные и импульсные разряды, инициированные
электронным пучком. Она использовалась также для обработки изображений, зарегистрированных на |
|
фотопленке. |
41 |
|
|
Устройство вывода оптической информации с ПЗС-линейки на ЭВМ «Электроника60» приведено на рис. 1.10 [20].
Рис. 1.10. Структурная схема информационно-вычислительного комплекса ввода и обработки изображений (Ф — фотосчитыватель; 51 — устройство управления фотосчитывателем к «Consul-260»; УС/С
— устройство согласования с каналом; ППА — перепрограммируемый адаптер; PA, PB, PC — буферные регистры; у — усилитель; РИ — распределитель импульсов; УДКВ — устройство двойной коррелированной выборки)
После приведения устройства в состояние готовности из ЭВМ в перепрограммируемый адаптер ППА засылается управляющее слово, определяющее режим работы ППА (ввод или вывод). В PC последовательно заносятся коды, при этом в линейке накапливаются заряды, которые затем переписываются в буферный регистр, после чего линейка переходит в режим ожидания и разрешается запуск распределителя импульсов
РИ. Запуск происходит при чтении предварительно преобразованной в АЦП информации из РА в ЭВМ. В
42
РИ формируется последовательность импульсов для сдвига зарядов в буферном регистре линейки на один разряд и ввода фонового заряда. РИ вырабатывает стробирующие импульсы для устройства двойной коррелированной выборки УДКВ, в котором происходит предварительная аналоговая обработка сигнала с выхода линейки. В нужный момент распределитель запускает АЦП. Частота тактового генератора РИ подбирается таким образом, чтобы выполнялось неравенство tсдв + tз + tпр ≤ 16, где tcдв — время сдвигов разрядов в линейке, икс; tз — время задержки из-за переходных процессов в УДКВ, икс; tпр — время преобразования АЦП, икс. Если неравенство выполняется, при следующем обращении к ППА из РА считывается готовый код, соответствующий выдвинутому из ВР заряду. При этом вновь инициируется запуск РИ.
Устройство работает с той же скоростью, с какой происходит обмен в ЭВМ. Если объем входной информации велик, такая скорость может оказаться недостаточной для работы в реальном масштабе времени. Для повышения скорости обмена видеоинформацией с ЭВМ вводятся промежуточная буферизация и аппаратная реализация алгоритма предварительной сортировки. Функциональная схема ПЗСконтроллера — основного блока устройства ввода и обработки изображения приведена на рис. 1.11 [21].
43
Рис. 1.11. Функциональная схема ПЗС-контроллера системы ввода и обработки изображений (БАО — блок аналоговой обработки; АЦП — аналого-цифровой преобразователь; ГФТИ— программно-управляемый генератор—формирователь тактовых импульсов; БЗУ—буферное запоминающее устройство с логикой сортировки и определения координат максимумов; ИПДП— интерфейс прямого доступа к памяти; ЦАИ — цифроаналоговый интерфейс; ИП — источник питания.
Генератор-формирователь ГФТИ формирует последовательность тактовых импульсов для управления трехмерным ПЗС-формирователем (линейным или матричным). Специфика настройки ГФТИ определяется типом используемого ПЗС-датчика и размером его фоточувствительной поверхности.