

Выделение образов в СТЗ ортопедического артикулятора. Литвиненко А.М., Семынин А.А
.pdfА.М. Литвиненко А.А. Семынин
ВЫДЕЛЕНИЕ ОБРАЗОВ В СТЗ ОРТОПЕДИЧЕСКОГО АРТИКУЛЯТОРА
Учебное пособие
Воронеж 2005
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
А.М. Литвиненко А.А. Семынин
ВЫДЕЛЕНИЕ ОБРАЗОВ В СТЗ ОРТОПЕДИЧЕСКОГО АРТИКУЛЯТОРА
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2005
УДК 658.52.011.56.012.3.005:658.012.011.56
Литвиненко А.М., Семынин А.А. Выделение образов в СТЗ ортопедического артикулятора: Учеб. пособие. Воронеж: Воронеж. гос. техн. ун-т, 2005. 171 с.
В учебном пособии рассмотрены вопросы построения систем технического зрения, обработка изображений СТЗ, и в частности СТЗ ортопедического артикулятора.
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 220200 «Автоматизация и управление », специальности 220201 «Управление и информатика в технических системах», дисциплине «Специализированные исполнительные устройства».
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD97.0 и содержится в файле «Выделение образов в СТЗ ортопедического артикулятора.rar».
Табл. 2. Ил. 62. Библиогр.: 41 назв.
Научный редактор д-р техн. наук, проф. В.Л.Бурковский
Рецензенты: НИИ Механотроника-Альфа (ген.директор канд.техн.наук, доц Э.Г. Кузнецов); д-р техн. наук, проф Ю. С. Сербулов (ВИВТ)
©Литвиненко А.М., Семынин А.А., 2005
©Оформление. Воронежский государственный технический университет,
2005
Введение
Роботы, снабженные СТЗ, достаточно широко и успешно применяются во многих отраслях промышленности на таких операциях, как контроль и отбраковка различных деталей и изделий по внешнему виду, загрузка обрабатывающих станков деталями с конвейеров или из бункеров, сортировка и ориентированная укладка в кассеты деталей и заготовок, в том числе неупорядоченно движущихся по конвейеру или поступающих в таре навалом, сборка и комплектация узлов, сварка, окраска, упаковка изделий, монтаж электронных схем и других СТЗ используют также для обеспечения условий техники безопасности на роботизированных рабочих местах, организации учета и складирования предметов производства, маршрутизации материалопотоков в гибких производственных системах, управления транспортными мобильными роботами.
Роль адаптивных роботов с техническим зрением и элементами искусственного интеллекта еще более возрастает при расширении процесса роботизации в таких областях, как горнодобывающая промышленность, строительство, сельское и лесное хозяйство, коммунальные службы, быт, где рабочая среда носит сложный, плохо структурированный характер. СТЗ необходимы роботам, предназначенным для исследования космического и подводного пространства, используемым для тушения пожаров и при других стихийных бедствиях. В подобных приложениях СТЗ должна обеспечивать не только данные для непосредственной выработки сигналов обратной связи при управлении движениями робота и передачу сведений об окружающей среде человеку-оператору, но и информацию для формирования роботом модели рабочей среды в целях автоматического планирования действий.
Функциональное назначение СТЗ робота в зависимости от области и конкретных условий его применения довольно многообразно. Наиболее типичными функциями, выполняемыми СТЗ в робототехнике, являются следующие: регистрация наличия объекта в поле зрения датчика внешней (по отношению к роботу) видеоинформации — видеосенсора; подсчет числа объектов2 , находящихся в поле зрения или прошедших перед видеосенсором; считывание и расшифровка меток (цветовых или штриховых кодов, буквенно-цифровых символов, этикеток и других маркеров); обнаружение препятствий, мешающих движениям робота; измерения геометрических и физических параметров объектов; контроль изделий на наличие видимых дефектов, полноту комплектации, соответствие эталонам; классификация (распознавание) объектов; определение местоположения и ориентации объектов в рабочей зоне робота; поиск нужных объектов на рабочей сцене; измерение скорости движущихся объектов; слежение за перемещениями и изменениями скорости объектов; визуальное определение изменений во времени наблюдаемых физических и технологических процессов; обеспечение информации для задания и коррекции траекторий рабочего органа робота в адаптивном режиме; навигация и наведение мобильных роботов; визуальный контроль правильности выполнения операций роботом; калибровка геометрических параметров манипулятора, привязка его системы координат к системе координат рабочего пространства; обеспечение требований техники безопасности.
Функциональные задачи СТЗ, характерные для робототехнических приложений, можно условно разделить по уровню их относительной сложности. К элементарным задачам обычно относят: обнаружение наличия объекта; измерение расстояния до объекта, его линейных или угловых перемещений, скорости; измерение геометрических параметров объекта (линейных и угловых размеров, площади и т. п.); определение физических характеристик излучения от объекта (интенсивности, спектрального состава и пр.); подсчет числа объектов и др.
Более сложный круг задач выполняет, например, СТЗ, которая снабжает систему управления манипуляционного робота информацией, необходимой для захватывания неупорядоченных объектов. В число этих задач входят: обзор рабочей сцены (плоской или
3
пространственной) для поиска представляющего интерес объекта — одиночного или одного из нескольких, лежащего изолированно от других или соприкасающегося (перекрывающегося) с ними; определение местоположения и ориентации этого объекта; его классификация (если имеется несколько различных классов объектов). При этом объекты могут различаться не только размерами и формой (силуэтом), но и текстурой, цветом и т. п., покоиться или находиться в движении. Этот пример иллюстрирует тот факт, что относительная сложность функциональных задач СТЗ характеризуется целым рядом признаков, среди которых можно выделить следующие.
Размерность рассматриваемой сцены. Пространственные задачи, требующие анализа трехмерных сцен, как правило, намного сложнее «плоских» задач, в которых достаточно обработки изображения одной двумерной проекции сцены на картинную плоскость. Промежуточное положение занимают квазиплоские задачи («размерности 2,5»), где рассматривается картинная плоскость с добавлением информации о «глубине» (дальности) видимых точек изображения.
Степень изолированности объектов. По этому признаку задачи СТЗ классифицируются так (в порядке возрастания сложности): задачи с одиночным объектом; задачи с несколькими изолированными (т. е. несоприкасающимися) объектами на изображении; задачи с соприкасающимися (но не перекрывающимися) изображениями объектов; задачи с перекрытием одних объектов рабочей сцены другими.
Однородность объектов. Этот признак характеризует сложность задач классификации, стоящих перед СТЗ. Если все объекты, которые могут быть предъявлены СТЗ, идентичны, эта проблема вообще не возникает. При наличии ряда неодинаковых объектов задача их классификации тем сложнее, чем более «похожи»
друг на друга их изображения, т. е. чем больше классифицирующих признаков
4
необходимо для однозначного описания отличий каждого объекта от всех остальных.
Стационарность рабочей сцены. Изображения покоящихся объектов обрабатывать и анализировать проще, чем изображения объектов, которые перемещаются относительно видеосенсоров (например, при движении деталей по конвейеру, зрительном очувствлении мобильного робота, работе СТЗ типа «глаз на руке»).
Число элементов изображения. Чем больше размеры поля зрения и чем выше требуемая разрешающая способность СТЗ, тем сложнее задача, поскольку приходится обрабатывать больше элементов получаемого изображения (пикселов).
Число градаций яркости. Задачи, в которых достаточно анализировать силуэтные очертания объектов, т. е. работать с двух-градационными (бинарными) изображениями, как правило, решаются проще задач, требующих анализа многоградационных
(полутоновых) изображений.
Спектральный состав видеосигнала. Наделить робот способностью воспринимать цветные изображения, вообще говоря, сложнее, чем снабдить его монохроматическим зрением.
Кроме того, на сложность тех или иных задач СТЗ существенное влияние оказывают такие факторы, как качество освещения рабочей сцены, его стабильность, уровень оптических и электрических помех, контрастность объектов относительно фона, отражающие свойства их поверхности, и др.
Чем более сложные задачи с учетом всей совокупности описанных критериев способна решать СТЗ, тем выше уровень функциональной гибкости («интеллекта») робота может быть обеспечен с ее помощью.
Для выполнения своего функционального назначения СТЗ робота в общем случае
5
должна обеспечивать: восприятие оптического сигнала и формирование изображения; предварительную обработку изображения в целях ослабления влияния шумов, улучшения контрастности, коррекции искажений, сжатия информации и т. д.; сегментацию изображения сцены на составные части — выделение нужных объектов, их фрагментов или характерных особенностей; описание изображений — расчет их
геометрических и иных характеристик, вычисление классифицирующих признаков, определение местоположения и ориентации; анализ изображения с распознаванием образов или классификацией объектов и интерпретацией сцен на основе модели проблемной среды; передачу полученных результатов в систему управления робота.
Создание СТЗ робота, отвечающей ее конкретному функциональному назначению, включает следующие этапы: 1) постановку задачи на содержательном уровне и составление технического задания на СТЗ; 2) выбор структурной и функциональной схем СТЗ; 3) математическую формулировку задач функциональных блоков СТЗ; 4) разработку алгоритмов решения функциональных задач; 5) выбор средств реализации алгоритмов и конкретизации технических характеристик аппаратных, аппаратнопрограммных и программных блоков СТЗ в соответствии с техническим заданием; 6) разработку аппаратного и программного обеспечения СТЗ.
6
ГЛАВА 1.
ОБЩИЕ ВОПРОСЫ СТРУКТУРНОГО ПОСТРОЕНИЯ СИСТЕМ ТЕХНИЧЕСКОГО ЗРЕНИЯ
1.1. Основные характеристики систем восприятия изображений
Оценка возможностей решения задач восприятия изображений должна осуществляться на основе анализа не только системных характеристик видеоустройств, но и собственных характеристик фотоприемников, поскольку последние в ряде случаев определяют предельно достижимые результаты. К основным системным характеристикам относятся частотно-контрастная характеристика (ЧКХ), область расстояний возможной идентификации объекта, разрешающая способность, спектральное распределение освещенности фотоприемника, скорость приема данных. Необходимо учитывать следующие собственные характеристики фотоприемиков: пороговую чувствительность, обнаружительную способность, квантовую эффективность, динамический диапазон, количество информации, рабочую полосу частот и инерционность.
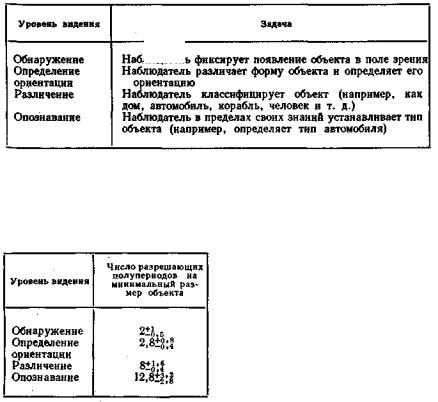
Традиционный подход к оценке качества видеосистемы в целом состоит в определении ее способности разрешать изображения штриховых мир с разными пространственными частотами (при идентичных условиях по контрасту и уровню освещенности приемника). Согласно критериям Джонсона [1], задачам обнаружения, определения ориентации, различения и опознавания объектов ставится в соответствие четыре уровня видения (табл. 1.1),
Таблица 1.1.
Содержание основных задач, решаемых СТЗ
9
Последним в свою очередь — число полупериодов штриховой миры, которое должно быть разрешено в пределах минимального размера объекта (табл. 1.2).
Таблица 1.2. Число полупериодов штриховой миры, которое должна разрешать видеосистема при различных
уровнях видения
Другими словами, постулируется определенная эквивалентность задач восприятия изображения объекта и изображения штриховых мир. Например, в соответствии с этим подходом задачу опознавания объекта можно решить при условии, если видеосистема способна воспроизводить изображение штриховой миры с числом разрешаемых элементов от 13 до 26, укладывающихся в наименьший размер объекта (считается, что контраст и уровень освещения такие же, как и для объекта с учетом возможного поглощения и рассеяния излучения на трассе объект — фотоприемник). Правомерность использования такого подхода при проектировании видеосистем проверялась экспериментально. Сопоставлялись между собой пороговые отношения сигнал/шум, при которых вероятности различения (опознавания) объектов и штриховых мир, выбранных согласно критериям Джонсона, становятся равными 0,5 [1], Близость пороговых значений, полученных для объектов (фактически в эксперименте использовались их фотографии и макеты) и эквивалентных мир, свидетельствует о целесообразности использования последних при оценке возможностей видеосистем.
Число элементов изображения, которое необходимо разрешать, определяет область расстояний
10

возможной идентификации объекта. Например, при использовании телескопа с фокусным расстоянием линзы f = 54,4 м, углом поля зрения в горизонтальном направлении 6° и длине 13 элементов разложения матрицы фотоприемника 0,234 мм размер области, в которой возможна идентификация объекта высотой 2,3 м, ограничивается расстоянием К = (54,4/0,234) 2,3 = 535 м при любом уровне освещенности передаваемой картины. Шумы и неоднородности приемника дополнительно уменьшают геометрическую область идентификации объектов, что особенно сказывается при малых уровнях освещенности. При больших расстояниях от фотоприемника до объекта указанная область ограничивается также за счет уменьшения контрастности изображения, обусловленного рассеянием света в атмосфере. Методики учета воздействия этих факторов на расстояние от приемника до границы рабочей области при низком уровне освещенности приведены в работе [1].
В процессе передачи изображения от объекта к наблюдателю исходная информация претерпевает изменения, которые зависят от характеристик как самого приемника, так и канала передачи изображения. Пусть Н (х) — распределение излучения. Тогда выборки излучения многоэлементным приемником (с пространственным периодом повторения элементарных ячеек d) в x-пространстве можно описать уравнениями:
(1.1) |
|
где R (х) — пространственное распределение фоточувствительности |
детектора; S (х) — |
11 |
|
периодическая цепочка дельта-функций с периодом d. |
|
Соответственно в представлении пространственной частоты (f-пространстве) для описания процесса |
|
выборки излучения многоэлементным приемником имеем уравнения: |
|
(1.2) |
(1.2) |
где R (f), H (f) и S (f) — Фурье-образ функций R (х), Н (х) и S (х). Наиболее информационной характеристикой, на основе которой можно сопоставлять возможности видеосистем с различными типами приемников и оценивать влияние различных звеньев передачи изображения, является частотно-контрастная характеристика (ЧКХ). Она определяется нахождением преобразования Фурье функции R (х), характеризующей пространственное распределение фоточувствительности детектора:
(1.3)
Существует также способ определения ЧКХ как реакции системы на входной сигнал с определенной пространственной частотой и синусоидальным распределением освещенности, нормализованной к реакции на сигнал с нулевой пространственной частотой.
Для матричных фотоприемников полоса входного сигнала ограничивается (сверху) шагом Р следования чувствительных элементов (расстоянием между их центрами). Согласно теореме Найквиста
максимальная пространственная частота изображения fп mах , которую может передать матрица, равна fп шах =
1/2р.
На частоте Найквиста fп mах отношение сигнал/шум на выходе матричного приемника обычно минимальное, тогда как количество информации в изображении зачастую максимальное.
Существенное значение для системного проектирования имеет возможность использования ЧКХ для описания различия между информацией, зарегистрированной в видеосистеме, и исходной информацией, которую несет сам объект. При анализе систем изображения канал передачи информации рассматривается поэлементно, а полное влияние всех элементов определяется произведением их частотно-контрастных характеристик. Поскольку любое изображение можно представить в виде синусоидальных пространственных волн интенсивности (каждая с определенной пространственной частотой, амплитудой и фазой), в основу анализа можно положить рассмотрение отклика приемника на одну синусоиду с произвольной пространственной частотой. Помимо возможности поэлементного рассмотрения, другое не менее важное достоинство использования ЧКХ определяется тесной связью между пространственной частотой и разрешающей способностью. Разрешающая способность системы (ее способность воспринимать самые мелкие детали объекта) характеризуется пространственным разрешением (в парах линий на 1 мм или просто в линиях на 1 мм) при заданном уровне контраста или усиления системы. Контраст определяется как
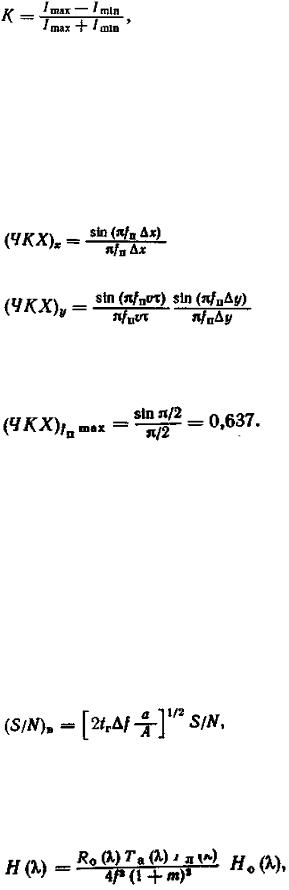
(1.4) |
(1.4) |
где Imах и Imin— амплитуды пространственной волны интенсивности в максимуме и минимуме. В процессе регистрации амплитуда пространственной волны претерпевает изменение, которое оценивается коэффициентом передачи контраста Q = Квых/Kвх, где Квых и Квх — значения контраста на выходе и входе. По сравнению с разрешающей способностью, которая определяет возможности оптической системы на предельно допустимой пространственной частоте, зависимость коэффициента передачи контраста Q от пространственной частоты fп, характеризующая ЧКХ, дает более полную информацию о свойствах системы, т. е. ее способности адекватно воспринимать детали объекта любых размеров, а не только самые мелкие [2].
Для матричного приемника с размерами дискретных элементов Х и Y в вертикальном и горизонтальном направлениях, когда изображение перемещается вдоль оси у, а считывание сигнала осуществляется в горизонтальном направлении, ЧКХ имеет вид:
в горизонтальном направлении
(1.5)
(1.5)
в вертикальном направлении
(1.6)
где v — скорость перемещения изображения относительно чувствительной поверхности; т — время экспозиции.
Для пространственной частоты, равной частоте Найквиста fп = fп max и при 100 %-ном использовании площади приемника (АХ = Р) получаем теоретически возможное значение
(1.7) |
(1.7) |
В работе [1] определены значения ЧКХ для типового приемника на ПЗС с учетом фактора накопления
14
заряда в фотоячейках, дискретного характера движения заряда, коэффициента неэффективности переноса и погрешностей синхронизации, обусловленных отличием средней скорости перемещения зарядовых пакетов и скорости движения предмета. Перечисленные факторы приводят к тому, что экспериментальные оценки ЧКХ при fп mах лежат в пределах 0,15—0,31 в отличие от теоретического значения, равного 0,637.
Изображение объекта считается хорошо различимым, когда по крайней мере для основной пространственной частоты амплитуда ЧКХ еще равна 1. С увеличением пространственной частоты неизбежно начинает уменьшаться амплитуда видеосигнала и соответственно отношение сигнал/шум (S/N), которое в телевизионной технике определяется как отношение размаха сигнала к среднеквадратичному значению шума. В типовой ситуации, когда сигнал берется относительно уровня фона, отношение S/N представляет собой функцию контраста и средней освещенности приемника.
Для видеосистем с выводом изображения на экран дисплея дополнительно используется также понятие «воспринимаемое отношение сигнал/шум» (S/N) в, которое учитывает характеристики наблюдателя
— свойство глаза интегрировать информацию как в пространстве, так и во времени. Значение (S/N) определяется уравнением
(1.8)
где S/N — отношение видеосигнал/шум; tг — время интегрирования глаза, tr = 0,1÷0,2 с; f — полоса пропускания видеоканала; А — полная площадь сканирования; a — площадь малой детали изображения, которая еще разрешается наблюдателем, но воспринимается им как единичный элемент объекта.
Спектральное распределение освещенности приемника Н (λ), ВТ/(м2*нм) или фотон/(м2*нм*с), если
пренебречь потерями излучения в атмосфере, описывается выражением [3]: 15
(1.9)
где R0 (λ)— спектральный коэффициент отражения объекта изображения (предполагается, что объект отражает диффузно); Tл(λ) — коэффициент прохождения атмосферы; Тл (К) — коэффициент прохождения линзы; f — фокусное расстояние линзы; m — коэффициент увеличения оптической системы; Н0 (λ) — спектральное распределение освещенности объекта изображения [Вт/(м2*нм) или фотон/(м2 * нм * с)].
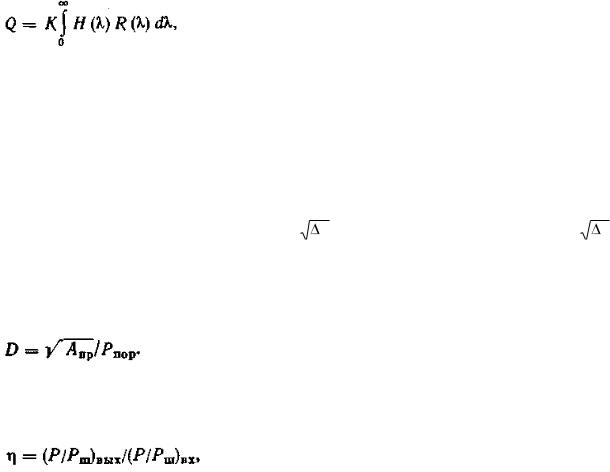
Отклик каждого чувствительного элемента можно вычислить с помощью выражения
|
(1.10) |
(1.10) |
где R (λ) — спектральный отклик приемника, А/Вт или Кл/Дж, отнесенный |
к площади ячейки |
|
приемника; |
К — коэффициент, связанный с площадью ячейки приемника и временем накопления |
|
информации в кадре. |
|
|
Чувствительность приемника описывается шумовым эквивалентным сигналом (ШЭС), который равен плотности входной энергии (в микроджоулях на квадратный метр), обеспечивающей на выходе системы отношение сигнал/шум, равное 1. Параллельно используют родственное с ШЭС понятие пороговой чувствительности Рпор. или эквивалентной мощности шума, которая оценивается мощностью оптического сигнала на входе приемника, при которой на его выходе отношение сигнал/шум в полосе, пересчитанное к
f = 1 Гц, равно 1. На практике в большинстве случаев напряжение выходного сигнала фотоприемника пропорционально мощности оптического сигнала Рвх (Uc ~ Рвх). а шумовое напряжение. Uш — корню
квадратному из ширины полосы частот f (Uш~ f |
), поэтому отношение сигнал/шум ~ Рвх / f |
и |
16 |
|
|
имеет, таким образом, размерность Вт / Гц. При определении пороговой чувствительности необходимо иметь в виду зависимость от частоты как мощности шума, так и коэффициента передачи приемника. Пороговая чувствительность приемников Рпор зависит также от площади приемника Апр и примерно пропорциональна Т/Лпр. Для сравнения свойств приемников различных размеров удобно использовать удельную обнаружительную способность D, Гц1/2*см*Вт -1, не зависящую от площади:
(1.11) |
(1.11) |
Помимо обнаружительной способности при сопоставлении приемных устройств оценивается также степень ухудшения отношения сигнал/шум в измерительном тракте от светочувствительной поверхности до регистрирующей части — квантовая эффективность
(1.12) |
(1.12) |
где (Р/Рш)вых и (Р/Рш)вх — отношение сигнал/шум на входе и выходе устройства.
В тех случаях, когда от видеосистем требуется регистрировать малые изменения уровня освещенности на ярком фоне и разрешать мелкие детали в условиях ограничения по времени принятия решения, становятся существенными такие характеристики фото-
приемника, как динамический диапазон (максимальное число накапливаемых в элементе электронов, отнесенное к среднеквадратичному шуму системы), количество информации, воспринимаемое при каждой экспозиции (определяется числом17почти независимых элементов изображения в поле фотоприемника) и инерционность.
Временные характеристики отклика приемника определяются физическими процессами, происходящими в нем при освещении. Обычно используют упрощающее предположение об экспоненциальном характере нарастания и спада выходного сигнала приемника, а инерционность приемника — его постоянная времени т — оценивается интервалом времени, в течение которого сигнал нарастает до уровня 1/е≈ 0,63 от стационарного значения. Инерционность приемника приводит к падению чувствительности для высокочастотных компонент оптического сигнала. Рабочей полосой частот приемника называют область от f = 0 до fпред = = 1/(2πτ).
18