

Системы управления электроприводами: лабораторный практикум. Медведев В.А., Трубецкой В.А
.pdfФГБОУ ВО “Воронежский государственный технический университет”
В.А. Медведев В.А. Трубецкой
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ:
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Утверждено учебно-методическим советом университета в качестве учебного пособия
Воронеж 2017

УДК 621.313.333
Медведев В.А. Системы управления электроприводами: лабораторный практикум: учеб. пособие / В.А. Медведев, В.А. Трубецкой. Воронеж: ФГБОУ ВО “Воронежский государственный технический университет”, 2017. – 101 с.
В учебном пособии определен порядок теоретического анализа и экспериментальных исследований влияния структурных особенностей, законов регулирования и параметров устройств на статические и динамические свойства систем управления электроприводами с обратными связями по скорости и току. Приводятся теоретические сведения, задания, методические рекомендации и контрольные вопросы.
Издание соответствует требованиям Федерального государственного образовательного стандарта высшего образования по направлению 13.03.02 “Электроэнергетика и электротехника” (направленности “Электропривод и автоматика” и “Электропривод и автоматика робототехнических систем”), дисциплинам “Основы систем управления электроприводами” и “Исполнительные системы роботов”.
Учебное пособие предназначено для студентов 4 курса, а также представляет интерес для преподавателей, аспирантов и специалистов, связанных с разработкой и исследованием систем управления электроприводами.
Табл. 7. Ил. 12. Библиогр.: 10 назв.
Рецензенты: кафедра электроэнергетики Международного института компьютерных технологий (зав. кафедрой д-р техн. наук, проф.
А.Н. Анненков); канд. техн. наук, доц. А.П. Харченко
сМедведев В.А., Трубецкой В.А.,
2017
сОформление. ФГБОУ ВО
“Воронежский государственный технический университет”, 2017
2
ВВЕДЕНИЕ
Дисциплины “Основы систем управления электроприводами” и “Исполнительные системы роботов” являются дисциплинами базовой части, изучение которых в значительной мере определяет специализацию бакалавров, обучающихся по направлению 13.03.02 “Электроэнергетика и электротехника” в области электропривода и автоматики.
Для освоения дисциплин необходимо знание математики, физики, информатики, теоретических основ электротехники, электроники и схемотехники, электрических машин, метрологии, электрического привода, теории автоматического управления, электрических аппаратов.
Наряду с изучением теоретических разделов в рабочих программах дисциплин предусмотрено выполнение студентами лабораторных работ, структура, содержание и технология проведения которых приведены в предлагаемом учебном пособии.
Перечень лабораторных работ охватывает основные разделы дисциплин и предусматривает исследование различного вида систем управления электроприводами с обратными связями по скорости и току.
В лабораторных работах приведены теоретические сведения, предварительное, рабочее и индивидуальное задания, методические указания к выполнению предварительных расчетов, проведению экспериментальных исследований и моделированию систем управления в среде MATLAB, а также контрольные вопросы.
Материал учебного пособия предназначен для выполнения студентами профилей “Электропривод и автоматика” и “Электропривод и автоматика робототехнических систем” лабораторного практикума по системам управления электроприводами, а также представляет интерес для преподавателей, аспирантов и специалистов, связанных с разработкой и исследованием электроприводов.
3
ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ
Лабораторный стенд представляет собой набор функциональных устройств, предназначенный для построения и исследования систем управления электроприводов с двигателем постоянного тока (ДПТ), широтно-импульсным преобразователем (ШИП) и обратными связями по напряжению, току и частоте вращения, а также в любой их комбинации. Датчики обратных связей – апериодические звенья первого порядка с изменяемыми статическими и динамическими параметрами.
В стенде имеются три универсальных регулятора, на каждом из которых могут быть реализованы пропорциональный (П), дифференциальный (Д), интегральный (И), пропорцио- нально-интегральный (ПИ) и пропорционально-интегрально- дифференциальный (ПИД) законы регулирования. Коррекция статических и динамических свойств – последовательная, параллельная и встречно-параллельная на основе регуляторов и внешних для стенда устройств, активных и пассивных, линейных и нелинейных. Порядок реализуемых систем до девятого.
Стенд позволяет исследовать влияние структуры и законов регулирования на статические и динамические свойства систем управления электроприводов. Набор его функциональных устройств соответствует составу реальных систем, даёт возможность физически моделировать системы с управлением по моменту и по скорости. Статические и динамические параметры устройств можно изменять в широком диапазоне, определять с достаточной точностью экспериментально.
Реализуемая на стенде физическая модель исполнительной системы позволяет всесторонне исследовать её поведение при различных управляющих воздействиях, выяснить качественное и количественное влияние параметров отдельных устройств на свойства всей системы. Наблюдение физических координат модели наглядно демонстрирует принципы функционирования сложных систем регулирования, ограничения на техническую реализацию устройств, наличие и
4
влияние помех, эффективность средств защиты от них. Количественно результаты физического моделирования хорошо согласуются с результатами теоретического анализа.
Стенд позволяет отрабатывать инженерные методики проектирования и оптимизации настроек сложных нелинейных систем подчинённого регулирования. При этом проверяется не только правильность расчета настроек, но и определяется правомерность принятых инженерных упрощений и допущений.
Совместно с внешними микропроцессорными средствами данный стенд даёт возможность построений и исследований систем воспроизведения движений с управлением по положению, может использоваться как объект для отработки алгоритмов позиционного и контурного управления.
Технические характеристики лабораторного стенда приведены в табл. 1.
|
Таблица 1 |
||
|
|
|
|
Технические характеристики |
Значение |
|
|
Номинальная мощность двигателя, Вт |
60 |
|
|
|
|
|
|
Напряжение реверсивного ШИП, В |
25 |
|
|
|
|
|
|
Мощность реверсивного ШИП, Вт |
120 |
|
|
|
|
|
|
Момент инерции привода, кг м2 |
(60 500) 10-6 |
|
|
Электромагнитная постоянная времени, мс |
25 |
250 |
|
|
|
|
|
Постоянная времени цепи управления ШИП, мс |
0,5 |
10,7 |
|
Постоянные времени фильтров датчиков тока |
|
|
|
и частоты вращения, мс |
0,05 |
2,0 |
|
|
|
|
|
Сопротивление якорной цепи, Ом |
1,2 |
7,2 |
|
|
|
|
|
Коэффициент усиления регуляторов |
0,5 |
15 |
|
|
|
|
|
Выходное напряжение датчиков обратных свя- |
|
|
|
зей, В (не менее) |
10 |
|
|
|
|
|
|
Максимальное напряжение задания, В |
20 |
|
|
|
|
|
|
Стенд состоит из блока регулирования (БР), электромеханического модуля (ЭММ) и блока питания (БП).
5

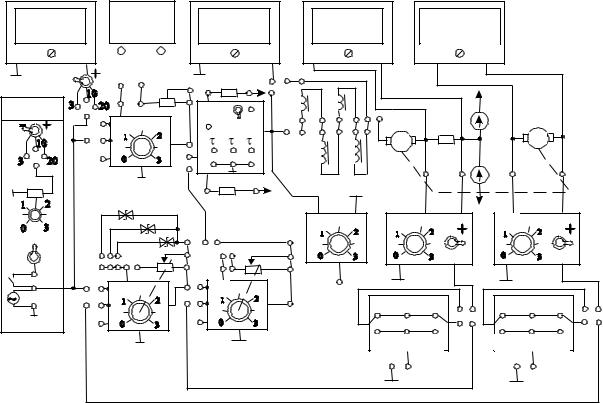
БР служит для взаимной коммутации устройств при построении систем регулирования, для изменения параметров этих устройств и контроля их сигналов. Общий вид передней панели БР приведён на рис. 1.
БР содержит устройство задания (УЗ), три регулятора (Р1, Р2, Р3), ШИП, датчики напряжения (ДН), тока (ДТ) и скорости вращения (ДС) двигателя, коммутируемые наборы дросселей цепи якоря L0 L3 и конденсаторов С1 С6 в фильтрах Ф1 и Ф2, блок измерительных приборов, выводы обмоток двигателя и тахогенератора.
На передней панели БР (см. рис. 1) изображена мнемосхема входящих в него устройств, размещены их входные и выходные клеммы, органы регулирования. Коммутация выполняется перемычками или соединительными проводниками.
УЗ обеспечивает плавную регулировку напряжения задания в диапазоне 0 3, 0 10, 0 20 В с возможностью скачкообразного изменения полярности, включения и выключения.
Дистанционная коммутация сигнала задания может выполняться с помощью внешнего реле и используется для опережающего запуска развёртки электронно-лучевого осциллографа при регистрации переходных процессов.
Каждый из регуляторов Р1 Р3 выполнен на операционном усилителе и транзисторном усилителе мощности, имеет два инвертирующих и один неинвертирующий входы для суммирования сигналов, защиту от короткого замыкания на выходе. На переднюю панель выведены цепи обратных связей и суммирующих точек регуляторов, что позволяет реализовывать П, Д, И, ПИ и ПИД законы регулирования. Для этого используются два набора конденсаторов стенда или внешние конденсаторы и резисторы.
Цепь обратной связи Р2 оборудована тремя стабилитронами, что позволяет иметь ограничение его выходного напряжения на четырёх разных уровнях. Максимальное выходное напряжение регулятора +10 В. Сопротивление суммирующих резисторов регуляторов 10 кОм, потенциометров в цепях обратных связей 15 кОм, выходное сопротивление 200 Ом.
6
PV1 |
|
Стенд |
PV2 |
|
|
|
включен |
|
|||
|
|
|
|
|
|
|
- |
Защита |
Rш1 +25В |
||
|
|
||||
|
|
|
|||
УЗ |
|
|
ШИП |
|
|
|
|
Р1 |
Uуп Uоп |
||
|
|
|
1 |
2 |
3 |
|
|
|
Rш2 -25В |
||
7 |
|
|
|
|
|
|
|
Р2 |
Р3 |
|
|
PА |
n, об/мин |
L0 |
L2 |
+25В |
|
||
|
|
Rш3 |
L1 |
М |
GT |
L3 |
|
|
|
-25В |
ДН |
ДТ |
ДС |
Ф1 |
Ф2 |
С1 С2 С3 |
С4 С5 С6 |
Рис. 1. Передняя панель стенда

Реверсивный ШИП выполнен по полумостовой схеме с двумя источниками питания, оборудован токовой защитой 8 А, светодиодной индикацией срабатывания защиты, токовыми шунтами 0,1 Ом в каждом из плеч. Опорное напряжение Uоп и напряжение управления Uу выведены для контроля на клеммы. Собственная постоянная времени Тп цепи управления составляет 0,5 мс, коммутируемые постоянные Тп1, Тп2 и Тп3 имеют значения 1,2, 2,5 и 5 мс соответственно. Значение Тп можно увеличить, подключив к клемме контроля напряжения Uу конденсатор емкостью С. Величина Тп составит 2,5 С мс.
Цепь нагрузки ШИП кроме якорной обмотки двигателя содержит токовый шунт 0,1 Ом и дроссели L0, L1, L 2 и L3, подключаемые в произвольном сочетании. За счёт дросселей меняются как активное сопротивление якорной цепи, так и электромагнитная постоянная времени. Эта постоянная времени может быть от единиц до сотен миллисекунд.
Датчики ДН, ДТ и ДС позволяют приводить сигналы обратных связей к уровням задающих воздействий за счёт плавной регулировки коэффициентов передачи. В датчиках тока и скорости имеется возможность изменения полярности выходного напряжения. Выходные сопротивления датчиков 200 Ом.
Конденсаторы С1 С3 и С4 С6 фильтров Ф1 и Ф2 имеют ёмкости 5, 10 и 20 мкф.
Вольтметры на панели стенда служат для измерения напряжений во всех цепях БР относительно общего провода. Амперметр постоянно включён в якорную цепь. Отдельный прибор служит для измерения частоты вращения двигателя.
ЭММ выполнен с двигателем постоянного тока независимого возбуждения типа ДП 60-60 со встроенным тахогенератором. Технические данные двигателя приведены в табл. 2.
На валу двигателя для создания регулируемого статического момента сопротивления установлен дисковый тормоз. Имеется возможность скачкообразного наброса момента нагрузки с помощью электромагнитного спускового устройства. Кнопка управления этим устройством выведена на панель БР.
8
Таблица 2 Технические данные электродвигателя ДП 60-60-4-24-Р11
Наименование параметра |
Значение |
|
параметра |
||
|
||
|
|
|
Номинальное напряжение, В |
24 |
|
|
|
|
Номинальная мощность, Вт |
60 |
|
|
|
|
Номинальный ток, А |
4,2 |
|
|
|
|
Частота вращения, об/мин |
4000 + 600 |
|
|
|
|
Максимальная частота вращения на время не |
6000 |
|
более 2 мин, об/мин |
|
|
|
|
|
Номинальный момент, нм (гс см) |
0,143(1460) |
|
Ток пусковой, А, не более |
34,5 |
|
|
|
|
Пусковой момент, н м (гс см) |
0,88(9000) |
|
Сопротивление якоря, Ом |
0,67 0,04 |
|
Падение напряжения на щётках, В, не более |
0,4 |
|
|
|
|
Момент инерции ротора, кг м2 (гс см с) |
59,8.10-6(0,61) |
|
Поток возбуждения, Вб |
1,57 10-3 |
|
Число пар полюсов p |
1 |
|
|
|
|
Число параллельных ветвей а |
1 |
|
|
|
|
Число активных проводников якоря N |
210 |
|
|
|
|
Коэффициент полезного действия, % |
70 |
|
|
|
|
Крутизна выходного напряжения тахогенера- |
не менее 20 |
|
тора на нагрузке 4 кОм, В на 1000 об/мин |
||
|
Момент инерции привода может быть увеличен установкой на вал ЭММ одного из четырёх дополнительных дисков. Уменьшение момента инерции выполняется отсоединением двигателя от тормоза.
Момент инерции вала тормоза Jт = 0,057.10-3 кг м2. Дополнительные диски имеют диаметр D = 65 мм, раз-
личаются толщиной h, которая составляет для дисков 1 4 соответственно 1,5; 3; 4,5 и 6 мм.
9

Значение момента инерции J монолитного однородного диска диаметром D, толщиной h (размеры в метрах), определяется как
J = 0,03125 |
h D4, |
(1) |
где  – плотность материала диска.
– плотность материала диска.
Для стали  = 7800 кг/м3. С учётом этого для стального
= 7800 кг/м3. С учётом этого для стального
диска
J = 765,76 h D4 кг/м2. |
(2) |
БП обеспечивает питание электронных устройств БР стабилизированным напряжением, а также нестабилизированное питание силовой цепи привода, имеет выключатель "СЕТЬ", плавкие предохранители и контрольную лампу включения сети. БП подключается к трёхфазной сети переменного тока.
Дополнительное оборудование стенда:
-двулучевой электронный осциллограф С1-83;
-генератор Г1-39 сигналов инфранизкой частоты синусоидальной и прямоугольной формы.
При эксплуатации стенда необходимо выполнять следующие инструкции.
1. Перед включением стенда проверьте правильность коммутаций на панели БР, убедитесь в свободном вращении дискового тормоза, в правильности исходного положения органов управления и контроля. Переключение цепи нагрузки ШИП выполняйте только при отсутствии на БР напряжения силовой цепи 25 В (контролируется по световой индикации "СЕТЬ" на передней панели БР).
2. Стенд включается переключателем "СЕТЬ" на БП.
3. Напряжение управления на ШИП можно подавать от устройства задания непосредственно или через один из регуляторов. Можно использовать внешний источник сигнала управления с напряжением не более +20 В.
4. Во всех режимах работы ток нагрузки ШИП, во избежание срабатывания защиты, не должен превышать 8 А.
10