

2033
.pdfМЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
1.Экспериментальную проверку настройки регуляторов выполнять по методике, описанной в работе № 8.
2.Исследования свойств контура тока по управлению проводить на застопоренном двигателе при токах якоря не более 2 А.
3.При выполнении п.3 рабочего задания формировать возмущение стопорением двигателя при скорости 1000 об/мин
итоке якоря 1 А.
4.Переходные процессы для скорости по управлению получать при пуске двигателя на скорость не более 500 об/мин.
5.Переходные процессы для скорости по возмущению получать при скорсти 3000 об/мин и набросе/сбросе нагрузки 2 А.
6.Астатизм по управлению оценивать по сигналам задания и обратной связи.
7.Астатизм по возмущению оценивать, наблюдая за регулируемой переменной.
8.Получать графики зависимостей и реализации задающих воздействий в среде MATLAB в соответствии с п.7 и п.8 методических рекомендации лабораторной работы № 8.
ТРЕБОВАНИЯ К ОТЧЕТУ
Требования к отчету – такие же, как в лабораторной работе № 1.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Какие постоянные времени в контурах тока и скорости подлежат компенсации при настройке на модульный оптимум?
2.Какие звенья определяют величины малых, не компенсируемых постоянных времени контуров тока и скорости?
3.По каким соображениям отказываются от компенсации малых постоянных времени?
91
4.Почему контур тока настраивают на модульный оп-
тимум?
5.В чем заключается и какими средствами обеспечивается настройка на модульный оптимум?
6.Какими статическими и динамическими свойствами по управлению обладает контур при настройке на модульный оптимум?
7.От чего зависят свойства системы по возмущению при модульном оптимуме?
8.Какова методика определения передаточной функции регулятора при настройке контура на модульный оптимум?
9.В чем проявляется взаимная подчиненность конту-
ров?
10.Запишите передаточную функцию, по которой можно рассчитать процесс изменения тока при стопорении двигателя.
11.В связи с чем, и в каких условиях пренебрегают внутренней обратной связью по ЭДС двигателя?
12.Как определяют малую постоянную времени контура скорости при наличии контура тока, настроенного на модульный оптимум?
13.Почему экспериментальная проверка настройки контура тока якоря выполняется на застопоренном исполнительном двигателе?
14.Что необходимо сделать, чтобы ток якоря застопоренного двигателя не превышал предельно допустимое значение?
15.Как экспериментально оценить коэффициент передачи контура тока по возмущающему воздействию?
16.В связи с чем рассматриваемая ИС является однократно интегрирующей?
17.Что такое модульный оптимум?
18.Что дает оптимизация контура по быстродействию?
92

ЛАБОРАТОРНАЯ РАБОТА № 10
ИССЛЕДОВАНИЕ ДВУКРАТНО ИНТЕГРИРУЮЩЕЙ ИСПОЛНИТЕЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ С ПОДЧИНЕННЫМ КОНТУРОМ ТОКА
Цель работы: Расчет, реализация и экспериментальные исследования двухконтурной системы подчиненного регулирования с настройкой на симметричный оптимум (контурная исполнительная система).
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Контурные ИС должны обладать высокой точностью воспроизведения предписанного значения регулируемой переменной во всем диапазоне нагрузок; поэтому от цепи формирования скорости требуется астатизм по возмущению. Для этого регулятор скорости должен быть ПИ-типа.
Как и в однократно интегрирующих ИС с позиционным управлением, в ИС с контурным управлением подчиненный контур тока оптимизируют по быстродействию (описано в лабораторной работе № 9). Элементами контура скорости также являются настроенный на МО контур тока, электромеханиче-
ское звено |
kд Ra |
и звено |
k |
|
, описывающее цепь обратной |
Tм s |
|
|
|||
|
|
T s |
1 |
||
связи по скорости.
Контур с ПИ-регулятором и интегрирующим звеном является двукратно интегрирующим, с астатизмом по управлению второго порядка. Настройка на МО такого контура невозможна. Другими словами, невозможно совместить в контуре астатизм второго порядка по управлению и астатизм по возмущению с практическим отсутствием перерегулирования. Однако плохие динамические свойства по управлению не ограничивают возможностей контурных ИС. Последние работают практически в установившихся режимах при относительно медленно изменяющихся сигналах управления и возмущения, а основное требование к настройке – коррекция статических
93
свойств. Отмеченным требованиям удовлетворяет настройка, при которой пропорциональная составляющая βРС и постоянная времени τРС ПИ-регулятора скорости рассчитываются, как и при настройке на модульный оптимум:
βP C |
|
Tм |
, τP C |
4Tμω , |
(45) |
|
2 Tμω kд Ra (1/ki ) kω |
||||
|
|
|
|
|
|
где Tμω 2Tμi |
Tω . При этом передаточная функция настроен- |
||||
ного контура в замкнутом состоянии |
|
|
|
||
W СО (s) |
|
|
|
4Tμωs 1 |
|
|
, |
|
КС |
|
(2T s |
1)(4T |
2s2 |
2T s 1) |
|||
|
|
|||||||
|
|
μω |
|
μω |
μω |
|||
а в разомкнутом |
|
|
|
|
|
|
|
|
|
W раз (s) |
|
4Tμωs 1 |
. |
||||
|
КС |
8T |
2s2 |
(T s |
1) |
|
|
|
|
|
|
|
|
||||
|
|
|
μω |
μω |
|
|
|
|
(46)
(47)
L
1
3 |
|
|
|
|
- 40 дБ/дек |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тμ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
- 20 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
0 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
- 40 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
То |
|
4Т |
μ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Тμ |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
63 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
18037
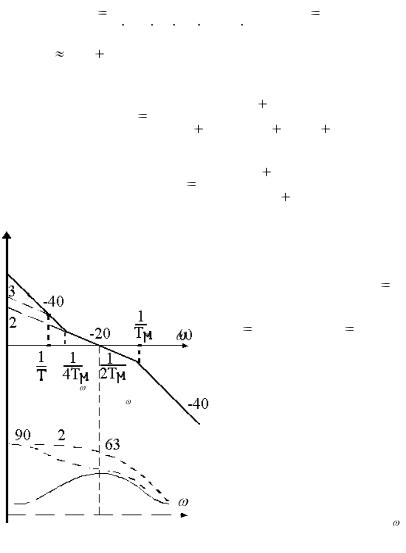
Рис. 12
Передаточной функции WКСраз (s) соответствует симметричная относительно частоты среза ЛАЧХ ωc 1/2Tμω
с частотами сопряжения
ω 1/4Tμω и ω 1/Tμω . Она представлена графиком 1 на рис. 12. По виду этой ЛАЧХ настройка получила наименование симметричного оптимума (СО).
Достоинство СО в том, что при астатизме по возмущению время переходного процесса определяется лишь постоянной времени Т ; его вид не зависит от других параметров объекта. Переходная
; его вид не зависит от других параметров объекта. Переходная
94

характеристика контура по управлению при настройке на СО имеет колебательный характер. Ее параметры: t1 3,1 Tμω ,
σm 43 % , tу 16,5 Tμω .
В контуре с инерционным объектом можно выполнить настройку, близкую к СО, выбирая параметры ПИ-регулятора, как рекомендовалось выше. При To 4Tμω параметры пере-
ходной характеристики такие же, как и при “чистом” СО. При To 4Tμω характеристики контура лежат между характеристи-
ками модульного (To 4Tμω ) и симметричного оптимумов. Это
видно из асимптотических ЛАЧХ, изображенных на рис. 12 для рассматриваемых случаев (1 – СО; 2 – МО; 3 – To 4Tμω ).
Очевидно, что при To 4Tμω настройка ПИ-регулятора
τP C 4Tμω теряет смысл.
Из сравнения ЛАЧХ при СО и МО видно, что частоты среза ωc 1/2Tμω и сопряжения среднечастотной и высокочас-
тотной асимптот ω 1/Tμω совпадают. Это свидетельствует об
одинаковой демпфированности колебаний при МО и СО. Большое перерегулирование при СО объясняется наличием в
числителях W CO (s) и W раз (s) |
форсирующего члена (4T s 1) . |
|
КС |
КС |
μω |
Существенное снижение перерегулирования можно получить при включении на входе контура задатчика интенсивности фильтра с передаточной функцией
Wф (s) |
1 |
|
. |
(48) |
|
|
|
||||
4Tμωs 1 |
|||||
|
|
|
|||
В результате получим следующие параметры переход- |
|||||
ного процесса t1 7,6 Tμω , σm |
8 % , tу |
|
13,3 Tμω . |
||
Если частоту среза увеличить на 25 % по сравнению с СО, то повысится быстродействие и уменьшится перерегули-
95

рование. Такая настройка получила наименование настройки на минимальную колебательность.
ПРЕДВАРИТЕЛЬНОЕ ЗАДАНИЕ
1. Получить у преподавателя задание по состоянию стенда. Из паспортных данных выписать величины индуктивности Lа и активного сопротивления Rа цепи якоря, суммарного момента инерции J , постоянных времени преобразователя
Tп и цепи обратной связи по скорости Т и току Тi, а также значения коэффициентов передачи двигателя kд и преобразователя kп. Считать, что k = 0,032 (В с)/рад, ki = 1,5 Oм.
и току Тi, а также значения коэффициентов передачи двигателя kд и преобразователя kп. Считать, что k = 0,032 (В с)/рад, ki = 1,5 Oм.
2.Рассчитать значения постоянных времени Та и Тм.
3.Изобразить структурную схему контура тока, а также структурную схему контура скорости.
4.Рассчитать параметры регуляторов, обеспечивающих настройку контура тока на МО, а контура скорости – на СО. Рассчитать емкости для ПИ-регуляторов тока и скорости.
5.Рассчитать параметры переходной характеристики.
РАБОЧЕЕ ЗАДАНИЕ
1. Реализовать на стенде заданное состояние устройств. Установить k = 0,032 (В с)/рад, ki = 1,5 Oм.
2.Задать коэффициенты передач регуляторов тока и скорости в соответствии с расчетными значениями п.4 предварительного задания.
3.Собрать контур тока. Зарегистрировать с помощью осциллографа его переходную характеристику по управлению,
атакже по возмущению при жестком стопорении двигателя. Сопоставить параметры переходного процесса со стандартными.
4.Собрать контур скорости. Зарегистрировать переходные характеристики для скорости по управлению и возмущению. Сопоставить параметры процессов со стандартными.
5.Исследовать статическую ошибку ИС по возмуще-
нию, регистрируя зависимости (Ia) и Uп(Ia).
96

ЗАДАНИЕ НА ИНДИВИДУАЛЬНУЮ РАБОТУ
На основе математической модели СПР в среде MATLAB исследовать ее статические и динамические свойства при настройке на СО.
1.Составить в среде MATLAB структурную схему системы ШИП-Д с настроенным на МО контуром тока и настроенным на СО контуром скорости. На выходах регуляторов тока и скорости установить нелинейные элементы для ограничения выходного напряжения на уровне ±14 В.
Задать в m-файле значения параметров функций неизменяемой части системы, а также расчетные значения параметров ПИ-регуляторов тока и скорости.
2.Исследовать переходной процесс в цепи формирования тока по управлению при пуске двигателя на скорости 500 об/мин. Сопоставить параметры процесса с расчетными. Экспериментально исследовать статические свойства системы подчиненного регулирования по управлению и по возмущению.
3.Исследовать переходные процессы в цепях формирования тока и скорости по управлению при пуске двигателя на скоростях 1000, 1500 и 3000 об/мин. Зарегистрировать максимальные значения тока и скорости.
4.Реализовать настройку на минимальную колебательность, установив на входе задатчик интенсивности с переда-
точной функцией Wф |
(s) |
1 |
|
|
. Выполнить п.3. |
|
|
|
|
||||
4Tμωs |
1 |
|||||
|
|
|
||||
5. Рассчитать значение порогового напряжения нелинейного элемента UНЭ, расположенного на выходе ПИрегулятора скорости, чтобы ток стопорения Iст равнялся 4 А. Построить электромеханическую характеристику системы ω(Ia) и зарегистрировать ток стопорения, а также получить зависимость Uп(Ia).
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
1. Методические рекомендации по исследованиям системы аналогичны описанным в работе № 9.
97
2.Рекомендации по получению графиков зависимостей
иреализации задающих воздействий в среде MATLAB приведены в лабораторной работе № 8.
ТРЕБОВАНИЯ К ОТЧЕТУ
Требования к отчету – такие же, как в лабораторной работе № 1.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.В каких случаях применятся настройка на СО?
2.В связи с чем в позиционных и контурных ИС настройка контура тока выполняется всегда на МО?
3.Изобразите в одной системе координат три ЛАЧХ:
– цепи из последовательно соединенных интегрирующего звена с большой постоянной времени и апериодического звена с малой постоянной времени;
–разомкнутой системы при настройке контура с указанной выше цепью на СО;
–регулятора, обеспечивающего настройку на СО.
4. Изобразите в одной системе координат три ЛАЧХ:
– последовательно соединенных апериодических звеньев с большой и малой постоянными времени;
–разомкнутой системы при настройке контура с указанной выше цепью на СО;
–регулятора, обеспечивающего настройку на СО.
5.С чем связано большое перерегулирование при настройке контура на симметричный оптимум?
6.Объясните по структурной схеме, за счет чего контур
снастройкой на СО имеет астатизм по возмущению.
7.Получите передаточную функцию по возмущению ИС управления скоростью с настройкой на СО.
8.Почему ИС управления скоростью является двукратно интегрирующей? Каковы ее свойства по управлению в установившемся режиме?
9.Как можно уменьшить перерегулирование при настройке контура на симметричный оптимум?
10.Что оптимизируется при настройке контура на СО?
98
ЗАКЛЮЧЕНИЕ
Предлагаемое учебное пособие содержит материал, необходимый для проведения лабораторных работ по дисциплинам “Основы систем управления электроприводами” и “Исполнительные системы роботов”, являющимся дисциплинами базовой части, которые в значительной мере определяют специализацию бакалавров по профилям “Электропривод и автоматика” и “Электропривод и автоматика робототехнических систем”.
Темы лабораторных работ, приведенных в учебном пособии, охватывают основные разделы изучаемых дисциплин. Порядок проведения лабораторных работ соответствует порядку изучения указанных дисциплин.
В лабораторных работах имеются достаточно подробные теоретические сведения о системе широтно-импульсный преобразователь – двигатель постоянного тока, определении характеристик, параметров и передаточных функций устройств, расчете систем управления электроприводами с обратными связями по скорости и по току, исследовании однократно интегрирующей и двукратно интегрирующей систем управления скоростью с подчиненным контуром тока. Тем не менее, для подготовки к выполнению работ необходимо изучение соответствующих разделов дисциплин.
Данное учебное пособие поможет студентам самостоятельно готовиться к выполнению лабораторных работ, является необходимым при непосредственном выполнении работы и оформлении отчета.
Лабораторный практикум также может использоваться студентами других профилей и специальностей, преподавателями и инженерно-техническими работниками, работающими в области электропривода.
Перспективным и значимым для теории и практики является дальнейшее развитие инженерных технологий разработки и исследования систем управления электроприводами различных технических устройств.
99
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Белов, М. П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов [Текст] : учебник / М. П. Белов, В. А. Новиков, Л. Н. Рассудов. – М. : Академия, 2007. – 576 с.
2.Поздняков, О. И. Электропривод промышленных роботов [Текст] : учеб. пособие / О. И. Поздняков. – М. : Изд-во МПИ, 1990. – 116 с.
3.Сафонов, Ю. А. Электроприводы промышленных роботов [Текст] / Ю. А. Сафонов. – М. : Энергоатомиздат, 1990. – 176 с.
4.Онищенко, Г. Б. Автоматизированный электропривод промышленных установок [Текст] / Г. Б. Онищенко, М. И. Аксенов, В. П. Грехов и др.; под. ред. Г. Б. Онищенко. – М. :
РАСХН, 2001. – 352 с.
5.Ключев, В. И. Теория электропривода [Текст] : учебник для вузов / В. И. Ключев. – 2-е изд., перераб. и доп. – М. : Энергоатомиздат, 2001. – 704 с.
6.Методы классической и современной теории автоматического управления [Текст] : учебник. В 5 т. Т. 4. Теория оптимизации систем автоматического управления / под. ред. К. А. Пупкова, Н. Д. Егупова. – М. : Изд-во МГТУ им. Н.Э.
Баумана, 2004. – 744 с.
7.Андрющенко, В. А. Теория систем автоматического управления [Текст] : учеб. пособие / В. А. Андрющенко. – Л. :
Изд-во ЛГУ, 1990. – 256 с.
8.Терехов, В. М. Системы управления электроприводов [Текст] : учебник для студентов вузов / В. М. Терехов, О. И. Осипов. – 2-е изд., стер. – М. : Академия, 2006. – 304 с.
9.Мамедов, В. М. Управление электроприводами постоянного тока [Текст] : учеб. пособие / В. М. Мамедов. –
Воронеж : ВПИ, 1983. – 132 с.
10.Юревич, Е. И. Основы робототехники [Текст] / Е. И. Юревич. – СПб. : БХВ-Петербург, 2005. – 416 с.
100