

654
.pdfОсновное достоинство такого подхода заключается в простоте реализации. Более того, данный подход позволяет учитывать непосредственно структуру объекта, т.е. получать модель, структурноподобную самому объекту.
Поскольку задача идентификации ГМА решается в рамках обратной конструкторской задачи, то структурное подобие объекта и модели является основополагающим. Поэтому при идентификации ГМА предпочтителен следующий подход: сочетание линейных алгоритмов с методом припасовывания [1, 7, 15], который позволяет задачу идентификации нелинейных систем исследуемого класса решить в два этапа: идентификация линейных систем в точках линеаризации; аппроксимация нелинейных коэффициентов. Однако наличие в объекте неизмеряемых координат определяет задачу идентификации как совместное оценивание параметров и состояния.
Наличие в системе неизмеримых координат требует проверки модели на наблюдаемость и идентифицируемость.
3.3.1. Наблюдаемость и идентифицируемость подсистем насоса-регулятора
В соответствии с критерием наблюдаемости система наблюдаема, если
zank(Mн) = n, |
|
|
|
|
|
|
|
|
|
(3.24) |
где Mн – матрица наблюдаемости, Mн = |
|
T |
; С |
T T |
T |
(А |
n−1 |
T |
( A – |
|
С |
А ;...С |
|
|
) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
матрица коэффициентов; С – матрица выхода; n – порядок системы). В соответствии с критерием идентифицируемости система инден-
тифицируема, если |
|
|
|
zank(Mид) = n, |
(3.25) |
где Mид |
– матрица идентифицируемости, |
Mид = V(0); AnV(0); |
... AnnV(0) |
; V (0) – начальные значения вектора состояния системы, ко- |
|
|
|
|
эффициентов.
Для объектов исследования ГМА, как было показано выше, ограничен пятью типами моделей (3.19)–(3.23). Для этих звеньев матрицы коэффициентов и выхода имеют соответствующий вид:
151
1. Апериодическое звено: |
|
0 |
0 |
A = |
, |
b1 |
a11 |
C =[0 |
1]. |
2.Идеальное интегрирующее звено:
0 0
A = b1 ,0
C =[0 1].
3. Реальное интегрирующее звено:
0 |
0 |
0 |
|
|
|
a11 |
|
A = b1 |
0 , |
||
|
0 |
a21 |
|
|
0 |
||
C =[0 1 0].
4. Реальное интегрирующее звено с суммарным входом:
0 |
0 |
0 |
|
a11 |
|
A = b1 |
0 , |
|
|
a21 |
|
b2 |
0 |
C =[0 1 0].
5. Звено третьего порядка: последовательное соединение апериодического и реального интегрирующего звена:
|
0 |
0 |
0 |
0 |
|
|
|
|
a11 |
0 |
|
A = |
b1 |
0 |
|||
|
|
|
|
, |
|
|
0 |
a21 |
a22 |
|
|
|
|
0 |
|||
|
|
0 |
0 |
a32 |
0 |
C =[0 |
1 0 |
0]. |
|
||
152
Применение критериев наблюдаемости и идентифицируемости [25] доказало, что все подсистемы насоса-регулятора наблюдаемы и идентифицируемы.
3.3.2. Оценивание параметров модели насоса-регулятора
Оценивание параметров нелинейной модели осуществляется в два этапа:
•идентификация параметров модели в точках линеаризации;
•аппроксимация нелинейных коэффициентов.
3.3.2.1. Идентификация параметров модели в точках линеаризации
Подсистемы насоса-регулятора, как было показано ранее, описываются 5 типами моделей. Первые два типа звеньев (апериодическое, идеальное интегрирующее) являются звеньями 1-го порядка, полностью измеряемыми, поэтому оценивание параметров таких звеньев не представляется сложным и осуществляется любым алгоритмом, например, методом последовательной регрессии. Оставшиеся звенья имеют неизмеряемые координаты: для звена 2-го порядка – одну внутреннюю x и для звена звено 3-гопорядка – две внутренние x1, x2 координаты.
Ранее было доказано, что существующие методы идентификации не обеспечивают структурное подобие модели объекту, поэтому при разработке алгоритма необходимо учитывать структуру объекта.
Рассмотрим для исследуемых типов звеньев матрицы перехода, которые учитывают структуру объекта:
1. Реальное интегрирующее звено:
1 |
0 |
0 |
|
|
|
a11 |
|
Ф = b1 |
0 . |
||
|
0 |
a21 |
|
|
1 |
||
2. Реальное интегрирующее звено с суммарным входом:
1 |
0 |
0 |
|
a11 |
|
Ф = b1 |
0 . |
|
|
a21 |
|
b2 |
1 |
153

3. Звено 3-го порядка: последовательное соединение апериодического и реального интегрирующего звена:
|
1 |
0 |
0 |
0 |
|
|
|
|
a11 |
0 |
|
Ф = |
b1 |
0 |
|||
|
0 |
a21 |
a22 |
. |
|
|
|
0 |
|||
|
|
0 |
0 |
a32 |
|
|
|
1 |
|||
В соответствии с вышеизложенным алгоритмом для звеньев 2-го порядка уравнение, описывающее динамику системы, имеет вид
с1 y(k +2) +с2 y(k +1) +с3 y(k) = u(k), |
(3.26) |
где коэффициенты сi для реального интегрирующего звена таковы:
b1a21 = 1 ,
c1
a11 +a22 = − c2 ,
c1
a11a22 = c3 ,
c1
для реального интегрирующего звена с суммарным входом:
b1a21 +b2 (1−a11) = 1 ,
c1
a11 +a22 = − c2 ,
c1
a11a22 = c3.
c1
В соответствии с вышеизложенным алгоритмом для звена 3-го порядкауравнение, описывающее динамику системы, можнозаписать как
с1 y(k +3) +с2 y(k +2) +с3 y(k + |
1) +с4 y(k) = u(k), |
(3.27) |
|||
где коэффициенты сi имеют следующий вид: |
|
||||
b a |
21 |
a = |
1 |
, |
|
|
|
||||
1 |
32 |
c1 |
|
|
|
|
|
|
|
|
|
154

a11 +a22 +1 = − c2 ,
c1
a11a22 +a11 + a22 = c3 ,
c1
a11a22 = − c4 .
c1
При исследовании рассматриваемой подсистемы – регулятора частоты вращения – предложенный алгоритм может быть применен для изодромного регулятора, представляющего собой реальное интегрирующее звено с суммарным входом.
Математическая модель изодромного регулятора имеет вид dxdt4 = b1u +a11x4 ,
dxdt5 = b2u + a21x5 ,
где x4 – перемещение изодрома; x5 – перемещение ДИ;
u – приведенное перемещение штока датчика и ползушки. Матрица перехода изодромного регулятора имеет вид
1 |
0 |
0 |
|
a11 |
|
Ф = b1 |
0 . |
|
|
a21 |
|
b2 |
1 |
Диапазон изменения перемещения изодрома x4 – от 0,3 до 3 см.
Для идентификации определены следующие точки линеаризации статических характеристик:
№ точки |
х40 |
u0 |
P30 |
|
линеаризации |
||||
|
|
|
||
1 |
0,3 |
0,0900 |
10,474 |
|
2 |
0,6 |
0,1858 |
10,947 |
|
3 |
0,9 |
0,2629 |
11,421 |
|
4 |
1,2 |
0,3487 |
11,895 |
|
5 |
1,5 |
0,4257 |
12,368 |
|
6 |
1,8 |
0,505 |
12,842 |
|
7 |
2,1 |
0,7347 |
13,316 |
|
8 |
2,4 |
0,8143 |
13,789 |
|
9 |
2,7 |
0,8920 |
14,263 |
|
10 |
3,0 |
0,9682 |
14,737 |
155
Вкаждой точке линеаризации рассмотрен переходный процесс при небольшом приращении u = u0 +∆u.
Вкаждой точке по приведенному выше алгоритму проведено оценивание параметров системы.
Результаты оценивания представлены в таблице:
№ точки |
b1 |
b2 |
a11 |
a21 |
|
линеаризации |
|||||
|
|
|
|
||
1 |
42,160 |
12,684 |
–13,879 |
–1,771 |
|
2 |
42,300 |
12,801 |
–13,270 |
–1,781 |
|
3 |
42,504 |
12,923 |
–12,936 |
–1,717 |
|
4 |
42,618 |
13,001 |
–21,034 |
–1,701 |
|
5 |
42,795 |
13,089 |
–20,475 |
–1,702 |
|
6 |
42,894 |
13,102 |
–19,216 |
–1,715 |
|
7 |
43,008 |
13,186 |
–17,841 |
–1,5598 |
|
8 |
43,088 |
13,216 |
–17,110 |
–1,625 |
|
9 |
43,126 |
13,350 |
–16,576 |
–1,666 |
|
10 |
43,227 |
13,441 |
–16,197 |
–1,722 |
3.3.2.2. Аппроксимация нелинейных коэффициентов
Анализ нелинейностей, характерных для ГМА с точки зрения оценивания параметров, позволяетразделить ихна две группы [34, 35]:
•монотонные нелинейности (центробежные датчики частоты вращения, элементы с изменяющимися профилями и т.д.);
•нелинейности с разрывами первого рода (подключение дополнительных дроссельных пакетов, ограничения переменных и т.д.).
Аппроксимация монотонных нелинейностей не представляет сложностей.
При аппроксимации нелинейностей с разрывами первого рода (рис. 3.4) можно применять методы приближения монотонными функциями на всей области исследования, кроме точки разрыва. Особенность аппроксимации кусочно-непрерывной функции заключается
вопределении аппроксимирующих функций fij1(u) и fij2 (u) в непре-
рывных областях, определении точки разрыва и определении значения аппроксимирующей функции в этой точке по принципу: если значение
аргумента u возрастает, то fij (uразр) = fij1(uразр), если значение аргумента u убывает, то fij (uразр) = fij2 (uразр).
156

Рис. 3.4. График кусочно-непрерывной зависимости с разрывом 1-го рода
Кроме монотонности нелинейные характеристики ГМА могут зависеть от различного количества аргументов.
В зависимости от числа переменных можно выделить следующие нелинейности:
1. Зависимость от одной переменной:
• fij = f0 + f1u.
Такая нелинейность характерна для коэффициентов модели изодромного регулятора, датчика физической частоты, автомата запуска.
• fij = f0++ f1u. 1 f2u
Такая нелинейность характерна для коэффициентов модели клапана постоянного перепада, узла управления расходом топлива по сигналам от основной автоматики, узла управления ВНА по сигналам от основной автоматики.
• fij = f0 +1f+1uf+3uf2u2 .
Такая нелинейность характерна для коэффициентов модели клапана постоянного перепада, узла управления расходом топлива по сигналам от основной автоматики, узла управления ВНА по сигналам от основной автоматики.
2. Зависимость от двух переменных:
• fij = f0 + f1u1 + f2u2.
Такая нелинейность характерна для коэффициентов модели механизма управления ВНА на резервной автоматике и по сигналам от основной автоматики.
157

При аппроксимации нелинейных коэффициентов модели изодромного регулятора следует иметь в виду следующее.
Матрица перехода модели изодромного регулятора имеет вид
1 |
0 |
0 |
|
a11 |
|
Ф = b1 |
0 , |
|
|
a21 |
|
b2 |
1 |
где b1 = b1(P3 ), b2 = b2 (P3 ),
a11 = a0 (x4 ) + a1(P3 )u, a21 = a2 (x4 ) + a4 (P3 )u,
u – приведенное перемещение штока датчика и ползушки; P3 – рабочее давление.
Численное значение a0 определяется коэффициентом истечения Qиз, включающего в себя параллельное соединение двух дроссельных пакетов: основного Q1 и дополнительного Q2. Подключение дополнительного дроссельного пакета Q2 при перемещении поршня изодрома скачком увеличивает Qиз, а следовательно, зависимость a0 (x4 ) характеризуется в момент подключения дополнительного дроссельного пакета точкой разрыва рода (рис. 3.5). Зависимость a11(P3 , u) также характеризуется наличием точки разрыва (рис. 3.6).
Рис. 3.5. График нелинейной зависимости a0 = f (x4 )
158
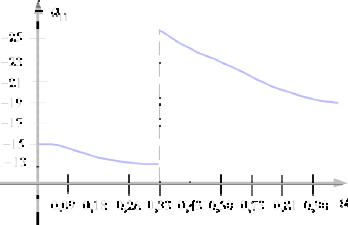
Рис. 3.6. График нелинейной зависимости a11 = f (u)
Результаты аппроксимации нелинейных коэффициентов модели изодромного регулятора приведены ниже:
Характеристика |
b1 |
b2 |
a11 |
|
a21 |
||
a0 |
|
a1 |
a2 |
a3 |
|||
|
|
|
|
||||
До точки разрыва |
43,008 |
13,102 |
–13,564 |
|
3,007 |
–1,965 |
0,9015 |
После точки разрыва |
43,008 |
13,102 |
–19,841 |
|
2,737 |
–2,213 |
0,804 |
Анализ адекватности идентификационных моделей исходному объекту показал совпадение модели с точностью не хуже 1,4 %. Наличие в объекте разрывных характеристик увеличивает погрешность оценивания параметров модели, при этом максимальная погрешность наблюдается в точках разрыва, но не превышает 1,6 % на всех режимах исследования идентификационных моделей.
Таким образом, указанный подход к построению идентификационных моделей позволяет разрабатывать модели, адекватные исходным объектам, с точностью не хуже 1,6 %, что соответствует инженерным требованиям, предъявляемым крешению задач проектирования.
159
3.4.Контрольные вопросы и задания
1.Обоснуйте выбор перемещений движущихся элементов гидромеханических систем СУ ДЛА в качестве переменных состояния?
2.Каким образом учитывается рабочее давление в моделях гидромеханических систем СУ ДЛА?
3.На каких стадиях проектирования СУ ДЛА можно использовать поэлементную модель?
4.Какие динамические переменные в гидромеханических системах СУ ДЛА являются неизмеряемыми и почему?
5.Определите свойства модели ГМА.
160