

654
.pdfчески не влияет на работу системы. Следовательно, при построении модели гидроагрегатов можно принебречь следующими факторами: силами жидкого и сухого трения; инерционностью движущихся масс; сжимаемостью жидкости, деформацией стенок гидросистемы. С учетом принятых допущений поэлементная модель элементов гидросистемы будет иметь вид
|
|
|
|
|
|
|
|
|
|
|
|
|
∑Kiu +∑Si Pi =∑ci x, |
|
|||||||
|
|
i |
|
|
|
|
|
i |
i |
|
|
|
|
|
|
′ |
|
∑ i |
|
||
|
|
∑ |
i |
u = |
(3.12) |
|||||
|
|
|
|
K |
|
c θ, |
||||
|
|
i |
|
|
|
|
|
i |
|
|
|
|
|
2 |
(∑S1i |
P − P1 −∑S2i |
P2 )= S dxdt , |
||||
|
|
|
||||||||
|
|
ξρ |
||||||||
|
|
|
|
|
|
|
i |
|
i |
|
где |
S |
– площадь поверхности подвижных элементов гидросистем; |
||||||||
Si , Si |
– площади входных и выходных отверстий; P – постоянное |
|||||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
рабочее давление; |
|
P1 |
– |
|
давление за |
входным отверстием; P2 – |
||||
давление перед выходным отверстием.
Из системы уравнений (3.12) видно, что динамическими координатами в модели ГМА являются перемещения подвижных элементов гидросистемы. Все остальные переменные связаны с ними алгебраическими уравнениями. Выделение перемещений подвижных элементов в качестве динамических координат целесообразно, поскольку они являются выходными параметрами динамических функциональных элементов гидросистемы. Кроме того, перемещения в большинстве своем являются измеряемыми величинами в гидросистемах.
Для дальнейшей процедуры идентификации необходимо поэлементную модель (3.12) формализовать, т.е. представить в векторноматричной форме (пространство состояния). Такая формализация невозможна из-за наличия нелинейных операций типа произведения и возведения в степень, поэтому для формализации моделей в терминах пространства состояния к поэлементной модели применяются классические методы линеаризации [25, 34]:
141

∑Kiu0 +∑Ki∆u +∑S0i P0i +∑∆Si P0i +∑S0i∆Pi = |
|||||||||||||||||
i |
|
|
|
i |
|
|
|
i |
i |
|
|
|
i |
|
|
||
= ∑ci∆x +∑ci x0 , |
|
|
|
|
|
|
|
|
|
|
|||||||
|
i |
|
′ |
|
i |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.13) |
|||
∑Kiu0 |
+∑K ∆u = ∑ci∆θ+∑ci∆θ0 , |
|
|
|
|||||||||||||
|
|
|
|
i |
|
|
|
i |
i |
|
|
|
|
|
|
||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
|
|
|
|
|
|
|
Si |
|
|
|
|
|
|
|
|
|
∑S10i |
P − P10 −∑ |
|
10 |
∆P1 +∑∆S1i P − P10 − |
||||||||||
|
|
|
P − P |
||||||||||||||
|
ξρ i |
|
|
|
|
|
i |
|
|
i |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Si |
|
|
|
|
|
dx |
|
||
− |
|
Si |
|
|
|
|
− ∆Si |
|
|
|
|||||||
|
P |
− |
|
|
20 |
∆P |
P |
|
= S |
|
. |
||||||
|
∑ |
|
|
||||||||||||||
∑ |
20 |
20 |
|
2 |
∑ |
2 |
20 |
|
|
dt |
|
||||||
|
i |
|
|
|
|
i |
Р20 |
i |
|
|
|
|
|
||||
Индекс «0» обозначает значение параметра в точке линеаризации.
После переноса начала координат в точку линеаризации и разрешения системы линеаризованных уравнений относительно динамических координат методом исключения переменных система уравнений (3.13) принимает вид
∑K |
∆u + |
∑∆S P |
+ ∑S |
|
∆P = |
∑c ∆x, |
|
|
|
|
|
||||||||||
i |
i |
|
|
|
|
i |
|
|
i 0i |
|
i |
0i |
i |
|
i |
i |
|
|
|
|
|
|
′ |
|
|
∑c |
∆θ, |
|
|
|
|
|
|
|
|
|
|
|
|
||||
∑K |
∆u = |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
i |
i |
|
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Si |
|
|
|
|
i |
|
|
|
Si |
|
|
(3.14) |
|
|
|
|
|
−∑ |
|
|
|
10 |
|
∆P |
+ ∑∆S |
|
|
P − P |
−∑ |
20 |
∆P |
− |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
ξρ |
|
i |
|
P − P10 |
|
i |
|
|
|
i |
P20 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
P |
|
) |
= S dx. |
|
|
|
|
|
|
|
|
|
|
|||
−∑∆Si |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
i |
|
|
2 |
|
20 |
|
dt |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Динамическими координатами в гидросистеме являются перемещения подвижных элементов, а динамическими уравнениями – уравнения баланса расходов. После разрешения системы уравнений (3.14) относительно перемещения она принимает вид
dx |
= a∆x +b∆u , |
(3.15) |
dt |
|
|
где a = f1(u0 ,P0 ,x0 ,S0 ,S10i ,S20i ,P10i ,P20i ), b = f2 (u0 ,P0 ,x0 ,S0 ,S10i ,S20i ,P10i ,P20i ).
142

Формализованная модель (3.15) является базовой для решения задачи идентификации.
Таким образом, методика построения формализованной поэлементной модели включает в себя три этапа.
1. Описание каждого элемента гидросистемы с помощью основных уравнений динамики:
|
|
|
|
|
|
|
|
|
|
∑K |
u |
+∑S P |
= ∑c x, |
|
|||||
i |
i |
|
|
i |
i i |
i |
i |
|
|
|
' |
|
= ∑ciθ, |
|
|
|
|||
∑Kiu |
|
|
|
||||||
i |
|
|
|
i |
|
|
|
|
|
|
2 |
|
|
∑Si |
P |
− P |
−∑Si |
||
|
|
|
|||||||
ξρ( |
|||||||||
|
i 1 |
|
1 |
i |
2 |
||||
2. Линеаризация системы уравнений:
∑K |
|
∆u + |
∑∆S P |
+ ∑S |
|
∆P |
= |
∑c |
∆x, |
||||||||
i |
i |
|
|
|
i |
|
|
i 0i |
|
i |
0i |
i |
|
i |
i |
|
|
|
|
' |
∆u = ∑c |
∆θ, |
|
|
|
|
|
|
|
|
|||||
∑K |
|
|
|
|
|
|
|
|
|
||||||||
i |
i |
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Si |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−∑ |
|
|
|
10 |
|
∆P + |
∑∆Si |
|
P − P |
|||
|
|
|
|
|
|
|
|
|
|
||||||||
ξρ |
i |
|
P − P10 |
|
i |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
P |
|
) |
= S dx. |
|
|
|
|
|
|
||
−∑∆Si |
|
|
|
|
|
|
|
||||||||||
|
i |
|
|
|
2 |
20 |
|
dt |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P2 )= S dxdt.
|
Si |
|
−∑ |
20 |
∆P − |
|
||
|
2 |
|
i |
P20 |
|
|
|
|
3. Приведение системы к формализованному виду: dxdt = a∆x +b∆u.
3.2.1.2. Математические модели функциональных элементов насоса-регулятора
Представленная ранее функциональная декомпозиция насосарегулятора позволила выделить девятнадцать подсистем, включающих в себя элементы ограничения, элементы релейного типа, динамические звенья, осуществляющие аналоговое регулирование подсистемы СУ ДЛА. С точки зрения построения математических
143

моделей особый интерес представляют динамические звенья, к которым относятся [25]:
•всережимный регулятор частоты вращения, включающий в себя клапан постоянного перепада (КПП) и изодромный регулятор;
•исполнительный элемент датчика температуры воздуха на входе
вдвигатель;
•датчик физической частоты вращения;
•автомат запуска, механизм поддержания Qmin ;
•механизм управления ВНА и ЗПВКВД на резервной автоматике;
•узел управления Qт по сигналам основной автоматики;
•узел управления ВНА по сигналам от основной автоматики.
В качестве примера приводится математическое описание регулятора частоты. Гидравлическая схема регулятора частоты вращения вала двигателя представлена на рис. 3.3.
Функционально регулятор частоты вращения состоит:
•из датчика физической частоты (контур I);
•изодромного регулятора (контур II);
•клапана постоянного перепада, который управляет положением наклонной шайбы качающего узла (контур III).
Датчик физической частоты вращения служит для обеспечения работы всережимного регулятора частоты вращения ротора компрессора высокого давления. Гидравлическая схема датчика приведена на рис. 3.3 (контур I) и состоит из центробежного датчика частоты, маятника 2 с пружинами, гидроусилителя 3 с рычагом обратной связи 4 и сервопоршня 5.
Математическая модель датчика имеет вид
dx1 |
= b u + a |
x , |
(3.16) |
|
|
||||
dt |
1 |
11 |
1 |
|
|
|
|
|
|
где x1 – перемещение поршня гидроцилиндра датчика; u – n – частота вращения ротора КВД двигателя;
b = |
KKГn0c1d3 (b1′x20 |
PКПД − P10 − Sж |
P10 − Sk PКПД − P10 ) |
+ |
|||||||
1 |
S 2 |
(c −c )d |
4 |
P − P P |
|
||||||
|
п1 |
|
1 |
2 |
|
|
КПД |
10 10 |
|
||
|
|
|
|
|
|
′ |
|
P10 |
|
|
|
|
|
|
+ |
Kb1d2 |
|
; |
|
||||
|
|
|
S |
п1 |
d (c −c ) |
|
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1 |
1 |
2 |
|
|
|
144
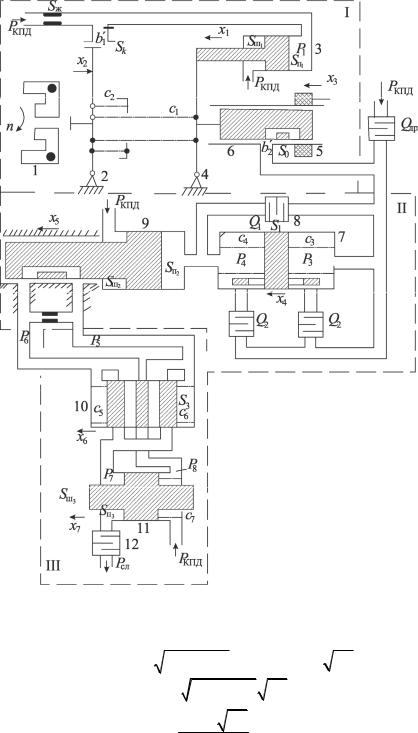
Рис. 3.3. Гидравлическая схема регулятора частоты вращения
a |
= |
Kc12 |
(1−c1)d32( PКПД − P10 (−Sk +b1′x20)− P10 Sж) |
− |
|||
|
2S 2 |
P |
− P |
P |
|||
11 |
|
|
|||||
|
|
|
п1 |
КПД |
10 |
10 |
|
− Kb1′d2 P10 ,
Sп1d1d4
145

здесь x2 – перемещение заслонки клапана; PКПД – постоянное давление; P1 – рабочее давление; Sж – площадь сечения жиклера; Sk – начальное сечение регулируемого клапана; b1′ – ширина отверстия регулируемого клапана; Sп1, Sш1 – площади поршня и штока гидроцилиндра; d1–d4 – плечи рычагов; K – коэффициент, характеризующий свойства рабочей жидкости; c1, c2 – жесткости пружин; KГ – коэффициент центробежного датчика.
Вывод аналитического значения коэффициентов b1, a11 приве-
ден в [25].
Изодромный регулятор управляет положением дозирующей иглы (ДИ). Площадь проходного сечения ДИ определяет количество топлива, подаваемого в камеру сгорания. Гидравлическая схема изодромного регулятора приведена на рис 3.3 (контур II) и состоит из регулирующего паза 6 на штоке датчика физической частоты, поршня изодрома 7, дросселирующего пакета 8 и дозирующей иглы 9.
Математическая модель изодромного регулятора имеет вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx4 |
|
= b u +a |
|
|
x , |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
1 |
|
11 |
|
4 |
|
|
(3.17) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= b u + a |
21 |
x , |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
2 |
|
|
5 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где x4 |
– перемещение изодрома; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
x5 |
– перемещение ДИ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
u = |
d3 |
x − x |
|
|
( x |
|
– |
перемещение |
|
гидроцилиндра датчика; x – |
||||||||||||||||||||||
d4 |
|
|||||||||||||||||||||||||||||||
|
|
1 |
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||||||||
перемещение рычага задания режимов); |
|
|
|
|
|
|||||||||||||||||||||||||||
b = |
Kb2′ |
P30 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
b = |
Kb2′ |
P30 |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2 |
|
|
|
|
|
Sп2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
c +c |
|
|
|
|
Qдр |
|
|
|
|
|
Kb′u |
0 |
|
|
|
|
|
Q |
|
|||||||
a = − |
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
2 |
|
+ |
|
|
из |
; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
11 |
|
|
|
|
|
S 2 |
|
|
P |
|
− |
Р |
|
|
|
Р |
|
|
|
|
|
|
P |
− Р |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
КПД |
|
|
30 |
|
|
|
30 |
|
|
|
|
|
30 |
40 |
|
|||||
146

|
|
|
c +c |
|
Qдр |
|
|
Kb′u |
0 |
|
|
a |
21 |
= − |
3 |
4 |
|
|
|
+ |
2 |
; |
|
|
|
|
|
|
|
||||||
|
|
|
S S |
п2 |
|
P |
− |
|
Р |
|
|
|
|
|
1 |
|
КПД |
|
30 |
|
|||
P30 , P40 – давления в рабочих полостях системы; c3, c4 – жесткости пружин;
S1 – площадь изодрома;
Sп2 , Sш2 – площади поршня и штока дозирующей иглы; b2′ – ширина отверстия регулируемого паза;
Qдр – коэффициенты истечения;
K – коэффициент, характеризующий свойства рабочей жидкости. Вывод аналитического значения коэффициентов b1, b2 , a11, a21
приведен в [25].
Перепад давления топлива на проходном сечении профиля ДИ поддерживается клапаном постоянного перепада (КПП), который управляет положением наклонной шайбы качающего узла.
Гидравлическая схема КПП приведена на рис. 3.3 (контур III) и состоитиззолотника 10, гидроцилиндра 11 и дроссельного пакета 12.
Математическая модель КПП имеет вид
dx7 |
= b u +b u |
вн |
+ a |
x , |
(3.18) |
|
|||||
dt |
1 1 2 |
11 |
7 |
|
|
|
|
|
|
|
где x7 – перемещение поршня гидроцилиндра КПП;
uвн – внешнее воздействие, uвн = f (n,αнш) ( n – частота вращения ротора КВД двигателя; αнш – угол наклона наклонной шайбы (зависимость uвн = f (n,αнш) приведена на рис. 3.3));
u1 = x6 – перемещение золотника КПП;
a |
= −Kc |
(S |
|
|
+b′ |
|
x |
|
|
|
)(K P |
|
(S |
|
+b′ |
|
x |
|
|
|
) +Q P′− P |
|
) / |
2(S |
|
|
− S |
|
|
)2 |
× |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
11 |
|
7 |
|
|
0 |
|
|
|
|
60 |
|
70 |
|
|
0 |
|
|
|
|
60 |
|
|
др |
70 |
|
|
|
п3 |
|
|
ш3 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
×(K P |
(S |
|
+b′ |
|
x |
|
|
|
|
|
)( P′− P + P′′ |
− P |
) +Q P′ |
− P P′′− P |
|
+ |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
70 |
|
|
|
0 |
|
|
|
|
60 |
|
|
|
|
70 |
|
|
|
|
|
|
|
|
80 |
|
др |
|
70 |
|
|
|
|
80 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
+(−Kc |
)(S |
|
|
+b′ |
|
x |
|
)(K P |
(S |
|
+b′ |
|
x |
|
) +Q P′− P |
) / 2(S |
|
|
− S |
|
|
)2 × |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
7 |
|
|
0 |
|
|
|
|
60 |
|
|
|
70 |
|
|
0 |
|
|
|
60 |
|
|
|
|
др |
70 |
|
|
п3 |
|
|
ш3 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
×(K P70 (S0 +b′ |
|
x60 |
|
)( P′− P70 + |
P′′− P80 ) +Qдр P′− P70 P′′− P80 ; |
|
|
||||
|
|
|
|
|
147 |
b = −K(S |
|
+b′ |
|
x |
|
)(K P (S |
|
+b′ |
|
x |
|
) +Q P′− P ) / 2(S |
|
− S |
|
|
|
)2 × |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
1 |
0 |
|
|
|
|
60 |
|
|
|
|
|
|
70 |
|
|
|
0 |
|
|
|
60 |
|
|
др |
|
|
|
|
70 |
|
|
п3 |
|
ш3 |
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
×(K P (S |
|
+b′ |
|
x |
|
)( P′ |
− P + P′′− P ) +Q P′ |
− P P′′− P |
|||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
70 |
|
|
0 |
|
|
|
|
60 |
|
|
|
|
|
|
70 |
|
|
|
|
|
80 |
|
|
|
|
|
др |
|
|
70 |
|
|
|
80 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
b2 = −Kb′(S0 +b′ |
|
x60 |
|
)( P′− P70 + P′′− P80 ) P′′− P80 (K P70 (S0 +b′ |
|
x60 |
|
) + |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
+Qдр P′− P70 ) / (Sп3 |
− Sш3 ) |
|
(K P70 (S0 |
+b′ |
|
x60 |
|
)( P′− P70 + P′′− P80 )× |
|||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ ′ |
|
|
|
|
|
|
|
− S |
|
) |
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
×(1+Q )] + Kb P |
− P / (S |
п3 |
ш3 |
. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
др |
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
P′ = P50 ,x60 > 0;
P60 ,x60 < 0
P′′ = P60 ,x60 > 0;
P50 ,x60 < 0
P50 , P60 – давления до и после дозирующей иглы;
P70 , P80 – рабочие давления;
Sп3 , Sш3 – площади поршня и штока гидроцилиндра КПП; c5 , c6 , c7 – жесткости пружин;
b′ – ширина отверстия в золотнике;
S0 – площадь начального отверстия в золотнике; Qдр – коэффициент истечения дросселя;
K – коэффициент, характеризующий свойства рабочей жидкости. Вывод аналитического значения коэффициентов b1, b2 , a11 приве-
ден в [25].
Таким образом, проведенная формализация ГМА на примере регулятора частоты вращения вала двигателя (как наиболее сложной подсистемы насоса-регулятора) показала, что поэлементные модели отдельных подсистем ГМА представляют собой типовые звенья, такие как апериодическое и реальное интегрирующее с суммарным входом с нелинейными параметрами.
Формализация остальных подсистем насоса-регулятора приведена в [25].
Анализ особенностей математических моделей основных узлов насоса-регулятора показал, что поэлементные модели отдельных подсистем насоса-регулятора могут быть представлены в виде следующих звеньев:
148
1. Апериодическое звено: |
|
|
|
|
|
|
dx1 |
= b u + a |
x . |
(3.19) |
|
|
|
||||
|
dt |
1 |
11 |
1 |
|
|
|
|
|
|
|
Этому типу математической модели соответствуют: |
клапан по- |
||||
стоянного перепада (КПП), исполнительный элемент датчика температуры на входе в двигатель, датчик физической частоты вращения.
2. Идеальное интегрирующее звено: |
|
|||||||
|
|
|
dx1 |
|
= bu. |
|
(3.20) |
|
|
|
|
dt |
|
||||
|
|
|
|
|
|
|
||
Этому типу математической модели соответствуют: автомат за- |
||||||||
пуска, механизм поддержания минимального расхода топлива |
||||||||
3. Реальное интегрирующее звено: |
|
|
||||||
|
dx1 |
|
= b u |
+ a |
x |
, |
||
|
|
|||||||
|
dt |
1 |
11 |
1 |
(3.21) |
|||
|
|
|
|
|
|
|||
|
dx2 |
|
|
|
|
|
||
|
= a |
21 |
x . |
|
|
|||
|
|
|
|
|||||
|
dt |
|
|
1 |
|
|
||
|
|
|
|
|
|
|
||
Этому типу математической модели соответствуют: механизм управления ВНА на РА, узел управления подачей топлива по сигналам от ОА, механизм управления ЗПВ КВД на РА.
4. Реальное интегрирующее звено с суммарным входом:
dx1 |
|
= b u + a |
|
x , |
||
|
|
|||||
dt |
2 |
11 |
|
1 |
||
|
|
|
|
|
(3.22) |
|
dx2 |
|
|
|
|
|
|
|
= b u + a |
21 |
x . |
|||
|
|
|||||
dt |
2 |
|
1 |
|||
|
|
|
|
|
|
|
Это математическое описание изодромного регулятора.
5. Звено третьего порядка: последовательное соединение апериодического и реального интегрирующего звена:
dx1 |
|
= b u |
+ a x , |
|
|
|
|
|
|
||||
dt |
1 |
11 |
1 |
|
|
|
|
|
|
|
|
|
|
dx2 |
|
= a |
x +a |
22 |
x , |
(3.23) |
|
|
|||||
dt |
21 |
1 |
2 |
|
||
|
|
|
|
|
|
|
dx3 |
|
= a |
x . |
|
|
|
|
|
|
|
|
||
dt |
32 |
2 |
|
|
|
|
|
|
|
|
|
|
|
Это математическое описание узла ВНА по сигналам от ОА. Выполненная классификация определяет область моделей, при-
сущих объекту исследуемого класса, и позволяет выбрать метод идентификации.
149
3.3. Выбор метода идентификации
Достаточно развитая теория идентификации систем управления предлагает большое количество различных методов исследования. Но ни один из методов идентификации не является универсальным, характеризуется своей областью применения. Области применения того или иного метода в значительной степени определяются наличием априорной информации об объекте, которая может включать в себя сведения о структуре объекта, о его шумовых характеристиках, предположения о линейности, стационарности объекта и другие сведения. Подобная информация помогает составить обобщенную характеристику объекта исследования, исходя из которой осуществляется выбор методов идентификации, характерных для данного класса объекта.
Проведенная формализация объекта исследования (ГМА СУ ДЛА) позволяет выделить следующие особенности:
•структура объекта априорно известна и определяется конструкцией агрегата;
•наблюдаемые сигналы являются непрерывными функциями;
•модель является детерминированной, так как уровень шума измерений мал по сравнению с уровнем полезного сигнала. Кроме того, информационно-измерительная система осуществляет дополнительную фильтрацию измерений;
•параметры модели являются функциями переменных состояния, т.е. модель нелинейная по параметрам;
•объект характеризуется неизмеряемыми координатами;
•для исследуемого класса ГМА ДЛА при идентификации звеньев необходимым и достаточным является определение постоянных времени звеньев иобщего (суммарного) коэффициента усиления [26, 36, 37].
Данные особенности определяют объект как структурно-опреде- ленный, но параметрически недостоверный, детерминированный, нелинейный.
Наиболее простой и часто применяемый при проектировании и идентификации нелинейных многомерных объектов метод – это двухэтапный метод идентификации. На первом этапе уравнения динамики линеаризуются в окрестностях какого-либо базового решения, решается задача оценивания параметров линейной системы. На втором этапе модели вточках линеаризации аппроксимируются какой-либо функцией.
150